You might also like
- PDE2Document20 pagesPDE2luhaonan2001No ratings yet
- PDE-Net - Learning PDEs From DataDocument9 pagesPDE-Net - Learning PDEs From DataJinhan KimNo ratings yet
- The Principled Design of Large-Scale Recursive NeuDocument29 pagesThe Principled Design of Large-Scale Recursive NeuHaladr KhaldiNo ratings yet
- Towards Out-Of-Distribution Generalization A Survey - Arxiv-2108.13624Document51 pagesTowards Out-Of-Distribution Generalization A Survey - Arxiv-2108.13624maxime.ptrnk1No ratings yet
- Topological Insights Into Sparse Neural NetworksDocument17 pagesTopological Insights Into Sparse Neural NetworksSanjay DasNo ratings yet
- Scientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextDocument67 pagesScientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextprfdjkdkvcssdNo ratings yet
- 1 s2.0 S1566253524000733 MainDocument11 pages1 s2.0 S1566253524000733 MainAbdullah AbdullahNo ratings yet
- Statistics Mechanic of Deep LearningDocument28 pagesStatistics Mechanic of Deep Learningmicay042007No ratings yet
- Physics Informed NNDocument85 pagesPhysics Informed NNTalha KhalidNo ratings yet
- F N O P P D E: Ourier Eural Perator For Arametric Artial Ifferential QuationsDocument16 pagesF N O P P D E: Ourier Eural Perator For Arametric Artial Ifferential QuationsSaunakDuttaNo ratings yet
- Robust Aggregation Operators For Intuitionistic Fuzzy Hyper Soft Set With Their Application To Solve MCDM ProblemDocument18 pagesRobust Aggregation Operators For Intuitionistic Fuzzy Hyper Soft Set With Their Application To Solve MCDM ProblemScience DirectNo ratings yet
- 1 s2.0 S0893608023002113 MainDocument14 pages1 s2.0 S0893608023002113 MainAlex AssisNo ratings yet
- Ding, 2023Document8 pagesDing, 2023Juliana KluckNo ratings yet
- On Interpretability of Artificial Neural Networks A SurveyDocument20 pagesOn Interpretability of Artificial Neural Networks A SurveyERICK MANUEL RUBIONo ratings yet
- Attention-Enhanced Neural Differential Equations For Physics-Informed Deep Learning of Ion TransportDocument8 pagesAttention-Enhanced Neural Differential Equations For Physics-Informed Deep Learning of Ion Transportga.simplicio2No ratings yet
- A Hierarchical Fused Fuzzy Deep Neural Network For Data ClassificationDocument8 pagesA Hierarchical Fused Fuzzy Deep Neural Network For Data ClassificationYosua SiregarNo ratings yet
- D L T R: A O C D S P: EEP Earning Heory Eview N Ptimal Ontrol and Ynamical Ystems ErspectiveDocument25 pagesD L T R: A O C D S P: EEP Earning Heory Eview N Ptimal Ontrol and Ynamical Ystems ErspectiveRod MarchNo ratings yet
- Applied Sciences: Solving Partial Differential Equations Using Deep Learning and Physical ConstraintsDocument17 pagesApplied Sciences: Solving Partial Differential Equations Using Deep Learning and Physical ConstraintsMuthukumaranNo ratings yet
- Relation Meural MachinesDocument8 pagesRelation Meural MachinesEaco ShawNo ratings yet
- Deep Multi-View Subspace Clustering With Unified and Discriminative LearningDocument11 pagesDeep Multi-View Subspace Clustering With Unified and Discriminative LearningYijian FanNo ratings yet
- Deep Learning For Medical Materials: Review and PerspectiveDocument12 pagesDeep Learning For Medical Materials: Review and Perspectiveyuziyuzi hanNo ratings yet
- Recent Advances in AutoencodersDocument25 pagesRecent Advances in AutoencodersNikita ZavonskiyNo ratings yet
- pde 微分方程与神经网络Document16 pagespde 微分方程与神经网络jeff chenNo ratings yet
- A Survey of Multi-View Representation LearningDocument21 pagesA Survey of Multi-View Representation LearninghhhNo ratings yet
- System Identification Through Lipschitz Regularized Deep Neural NDocument36 pagesSystem Identification Through Lipschitz Regularized Deep Neural NVinodha RajendranNo ratings yet
- Structural Equation Modeling: A Multidisciplinary JournalDocument25 pagesStructural Equation Modeling: A Multidisciplinary JournalIonela BogdanNo ratings yet
- DPP For MLDocument120 pagesDPP For MLTheLastArchivistNo ratings yet
- Enrico Caldarola BigGrafs DBpediaDocument8 pagesEnrico Caldarola BigGrafs DBpediaFati DahNo ratings yet
- IEEE - Applications of Deep Learning and Reinforcement Learning To Biological Data PDFDocument17 pagesIEEE - Applications of Deep Learning and Reinforcement Learning To Biological Data PDFJaime Pizarroso GonzaloNo ratings yet
- Learning Hierarchical Review Graph Representations For RecommendationDocument14 pagesLearning Hierarchical Review Graph Representations For Recommendationruoruo00902000No ratings yet
- Cytometry PT A - 2010 - Meijering - Neuron Tracing in PerspectiveDocument13 pagesCytometry PT A - 2010 - Meijering - Neuron Tracing in PerspectiveCarlos BareaNo ratings yet
- Yan 2022Document22 pagesYan 2022Victor Flores BenitesNo ratings yet
- Ijms 22 02903 v2Document19 pagesIjms 22 02903 v2Raylson MelloNo ratings yet
- Neurocomputing: Yu Liang, Siguang Li, Chungang Yan, Maozhen Li, Changjun JiangDocument15 pagesNeurocomputing: Yu Liang, Siguang Li, Chungang Yan, Maozhen Li, Changjun JiangJorge Luis MortonNo ratings yet
- Reviews: Physics-Informed Machine LearningDocument19 pagesReviews: Physics-Informed Machine LearningSebastián Nicolás Jara CifuentesNo ratings yet
- Scientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextDocument62 pagesScientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextOtras CosasNo ratings yet
- Toward Causal Representation Learning: Byb S, F L, S B, N R K, N K, A G, Y BDocument23 pagesToward Causal Representation Learning: Byb S, F L, S B, N R K, N K, A G, Y BAnooshdini2002No ratings yet
- Toward Causal Representation Learning: Byb S, F L, S B, N R K, N K, A G, Y BDocument23 pagesToward Causal Representation Learning: Byb S, F L, S B, N R K, N K, A G, Y BAnooshdini2002No ratings yet
- Liu 2018Document10 pagesLiu 2018Rajan JattNo ratings yet
- To Compress or Not To Compress - Self-Supervised Learning and Information Theory: A ReviewDocument38 pagesTo Compress or Not To Compress - Self-Supervised Learning and Information Theory: A Reviewgodray1234aNo ratings yet
- Multi Layers NetworksDocument24 pagesMulti Layers Networksluisyepez13No ratings yet
- Physics-Guided Physics-Informed and Physics-EncodeDocument37 pagesPhysics-Guided Physics-Informed and Physics-EncodeÁngel Iván García MorenoNo ratings yet
- 1 s2.0 S0893608020304305 MainDocument10 pages1 s2.0 S0893608020304305 MainWorld FactsNo ratings yet
- A Survey of Deep Causal ModelDocument31 pagesA Survey of Deep Causal ModelOwenliey LiuNo ratings yet
- Deep Learning-Accelerated Computational Framework Based On PhysicsDocument51 pagesDeep Learning-Accelerated Computational Framework Based On Physicssohel ranaNo ratings yet
- Diffusion Based Causal Representation LearningDocument17 pagesDiffusion Based Causal Representation LearningbayesianroadNo ratings yet
- Probabilistic Selection Approaches in Decomposition-Based Evolutionary Algorithms For Offline Data-Driven Multiobjective OptimizationDocument10 pagesProbabilistic Selection Approaches in Decomposition-Based Evolutionary Algorithms For Offline Data-Driven Multiobjective Optimization刘哲宁No ratings yet
- Journal of Computational Physics: Zichao Long, Yiping Lu, Bin DongDocument17 pagesJournal of Computational Physics: Zichao Long, Yiping Lu, Bin DongAman JalanNo ratings yet
- Journal Pcbi 1011037Document29 pagesJournal Pcbi 1011037LYCOONNo ratings yet
- Schizophrenia Research: Jose A. Cortes-Briones, Nicolas I. Tapia-Rivas, Deepak Cyril D'Souza, Pablo A. EstevezDocument19 pagesSchizophrenia Research: Jose A. Cortes-Briones, Nicolas I. Tapia-Rivas, Deepak Cyril D'Souza, Pablo A. EstevezArif IrpanNo ratings yet
- A Holistic Approach To Distributed Dimensionality Reduction of Big DataDocument14 pagesA Holistic Approach To Distributed Dimensionality Reduction of Big DataTapan ChowdhuryNo ratings yet
- Bi-CLKT Bi-Graph Contrastive Learning Based Knowledge TracingDocument12 pagesBi-CLKT Bi-Graph Contrastive Learning Based Knowledge Tracingliuyunwu2008No ratings yet
- CNN PDFDocument27 pagesCNN PDFTalha KhalidNo ratings yet
- 1 s2.0 S0893608021000575 MainDocument9 pages1 s2.0 S0893608021000575 Main温鑫No ratings yet
- An Experimental Review On Deep Learning Architectures For Time Series ForecastingDocument25 pagesAn Experimental Review On Deep Learning Architectures For Time Series Forecastingpiyoya2565No ratings yet
- Advanced Modeling in Biological Engineering Using Soft Computing MethodsDocument16 pagesAdvanced Modeling in Biological Engineering Using Soft Computing MethodsSolomonNo ratings yet
- Classification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksDocument5 pagesClassification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksscribdkhatnNo ratings yet
- Neural Networks in The Educational Sector ChallengDocument6 pagesNeural Networks in The Educational Sector ChallengALEXNo ratings yet
- SVM Active Learning Approach For Image Classification Using Spatial InformationDocument19 pagesSVM Active Learning Approach For Image Classification Using Spatial InformationSimanta HazraNo ratings yet
- Caribbean Studies IADocument18 pagesCaribbean Studies IAansa_france100% (1)
- Write Up Newsletter p1Document5 pagesWrite Up Newsletter p1api-378872280No ratings yet
- Jawaban Uts-Bahasa Inggris Bisnis IDocument3 pagesJawaban Uts-Bahasa Inggris Bisnis IAidaNo ratings yet
- Crim DigestDocument76 pagesCrim DigestBernice joyce OliverosNo ratings yet
- Criteria of Reviewing Instructional Strategy PlanDocument2 pagesCriteria of Reviewing Instructional Strategy PlanIvy Mie SagangNo ratings yet
- Flymaster NAV Manual EN v2 PDFDocument52 pagesFlymaster NAV Manual EN v2 PDFRoberto PlevanoNo ratings yet
- Sample Professional - Engineer - Summary - StatementDocument5 pagesSample Professional - Engineer - Summary - StatementmrahmedNo ratings yet
- Syllabus Master RepsolDocument96 pagesSyllabus Master RepsolsdfjkasNo ratings yet
- Richard Coudenhove-Kalergi - Pan-Europa (2019)Document150 pagesRichard Coudenhove-Kalergi - Pan-Europa (2019)Eduardo AntónioNo ratings yet
- Essential Question and Enduring Understanding TutorialDocument28 pagesEssential Question and Enduring Understanding TutorialAureliano BuendiaNo ratings yet
- Linear Regression Analysis in ExcelDocument15 pagesLinear Regression Analysis in ExcelBertrand SomlareNo ratings yet
- Impression Management For LawyersDocument27 pagesImpression Management For Lawyersrulenso passmoreNo ratings yet
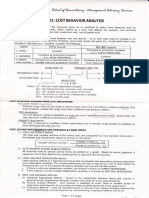
- 01 - Cost Behavior AnalysisDocument4 pages01 - Cost Behavior AnalysisVince De GuzmanNo ratings yet
- Virtues, Vices and Values - The Master List - 2016Document24 pagesVirtues, Vices and Values - The Master List - 2016Lion Goodman100% (1)
- FMM Solved Unit 1 Previous Years ProblemsDocument14 pagesFMM Solved Unit 1 Previous Years ProblemsAjith KumarNo ratings yet
- Contact Info and ContractDocument3 pagesContact Info and ContractJojimar Kenneth GonowonNo ratings yet
- Exam 3 Practice QuestionsDocument8 pagesExam 3 Practice Questionsphoenix180No ratings yet
- Legrand TXDocument20 pagesLegrand TXnikos180729983No ratings yet
- Unit 4: For A Better Community Skills: Reading Why Do People Volunteer?Document5 pagesUnit 4: For A Better Community Skills: Reading Why Do People Volunteer?Hồng Duyên QuáchNo ratings yet
- AD&D To BRP Second Edition ConversionDocument16 pagesAD&D To BRP Second Edition ConversionColin BrettNo ratings yet
- Anatomy and Physiology of ZombiesDocument12 pagesAnatomy and Physiology of ZombiesdsolisNo ratings yet
- 1 - Delaware Park RetrospectosDocument8 pages1 - Delaware Park RetrospectosjeisonNo ratings yet
- Concept-Paper-LP FINALDocument18 pagesConcept-Paper-LP FINALJodelyn Mae Singco CangrejoNo ratings yet
- Brand Centre Case Study Network RailDocument1 pageBrand Centre Case Study Network RailTarragó Hoenes CarlosNo ratings yet
- The Case Against Reality - The AtlanticDocument9 pagesThe Case Against Reality - The AtlanticManoj Gupta100% (5)
- Cause and Effect Sutra English and ChineseDocument84 pagesCause and Effect Sutra English and ChineseVendyChenNo ratings yet
- Curriculum Vitea TEMPLATEDocument11 pagesCurriculum Vitea TEMPLATEHarveyNo ratings yet
- L2 - W1 - F2F - Slides - Coursework OverviewDocument29 pagesL2 - W1 - F2F - Slides - Coursework OverviewUsman KhanNo ratings yet
- British LiteratureDocument13 pagesBritish LiteratureAlexa BaloghNo ratings yet
- IceHrm Administrator ManualDocument21 pagesIceHrm Administrator Manualerwinofm100% (1)