You might also like
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Mipsx 21Document16 pagesMipsx 21hayoula3No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- VHDL Testbench Code For The Single-Port RAMDocument2 pagesVHDL Testbench Code For The Single-Port RAMSouvik HalderNo ratings yet
- 单机机器人SDK文档Document21 pages单机机器人SDK文档Freya MaNo ratings yet
- Lab3 - Achmad Mauludin H. - 165060301111002Document4 pagesLab3 - Achmad Mauludin H. - 165060301111002Mauudin BRgNo ratings yet
- Lab 5 DR Muslim (Latest)Document15 pagesLab 5 DR Muslim (Latest)a ThanhNo ratings yet
- Private MIB Summary - XLSX - NMS-EPON-MIBDocument287 pagesPrivate MIB Summary - XLSX - NMS-EPON-MIBwfqefqwefNo ratings yet
- Attendance System Using Atmega32 PDFDocument15 pagesAttendance System Using Atmega32 PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Real Time SystemDocument4 pagesReal Time SystemNGAMIJENo ratings yet
- RAM 256x8Document1 pageRAM 256x8Percy Julio Chambi PaccoNo ratings yet
- Group Assignment - MicroDocument15 pagesGroup Assignment - MicroMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- The Test On CsDocument8 pagesThe Test On CsmichaelgodfatherNo ratings yet
- Design Prog Project Assign 1Document9 pagesDesign Prog Project Assign 1germanNo ratings yet
- HansRobot SDK DocumentDocument31 pagesHansRobot SDK DocumentAriel GaitanNo ratings yet
- The Test On CS: List - Based - Memory - Management.cDocument7 pagesThe Test On CS: List - Based - Memory - Management.cmichaelgodfatherNo ratings yet
- Sun RPC Tutorial: Sai Ram KuchibhatlaDocument37 pagesSun RPC Tutorial: Sai Ram KuchibhatlaVishnu ReddyNo ratings yet
- STM32 RC Car (Android Control Via Bluetooth)Document9 pagesSTM32 RC Car (Android Control Via Bluetooth)winNo ratings yet
- Ece 341 Lab6 1Document9 pagesEce 341 Lab6 1api-534483767No ratings yet
- Introduction To Free-RTOS: Deepak D'SouzaDocument34 pagesIntroduction To Free-RTOS: Deepak D'SouzaNguyễn QuânNo ratings yet
- Teste Com Pic16f628a e Sensor Dht11Document8 pagesTeste Com Pic16f628a e Sensor Dht11Marcio Jose Terezinha Belinssi100% (1)
- AVR Boot LoaderDocument7 pagesAVR Boot LoaderelfrichNo ratings yet
- Documentation On Setting Up SPI Protocol For ADE7878Document8 pagesDocumentation On Setting Up SPI Protocol For ADE7878phamvan_tuong100% (1)
- Time, Space and Power Complexity of ARM CORTEX M3: Team: Jatin Kumar (18BCB0072) and Prateek Sinha (18BCB0081)Document5 pagesTime, Space and Power Complexity of ARM CORTEX M3: Team: Jatin Kumar (18BCB0072) and Prateek Sinha (18BCB0081)kumarklNo ratings yet
- Pmc203en Avras2Document20 pagesPmc203en Avras2rdbasiclang rdbasicNo ratings yet
- Static Analysis of C++ Source CodeDocument34 pagesStatic Analysis of C++ Source CodeTatyanazaxarova2No ratings yet
- EE5530 Lecture16 Complete SV TestBenchDocument29 pagesEE5530 Lecture16 Complete SV TestBenchjithinkrishnac4474No ratings yet
- RTOS and PID ControllerDocument3 pagesRTOS and PID ControllerJames McPhillimyNo ratings yet
- Interfacing Temperature Sensor With MPLAB Xpress Evaluation Board Using I2C CommunicationDocument13 pagesInterfacing Temperature Sensor With MPLAB Xpress Evaluation Board Using I2C CommunicationsivaNo ratings yet
- EmbeddedSys Nri Unit-VIIDocument36 pagesEmbeddedSys Nri Unit-VIIMurali KrishnaNo ratings yet
- EE5530 Lecture17 Complete SV TestBench With SCBDocument35 pagesEE5530 Lecture17 Complete SV TestBench With SCBjithinkrishnac4474No ratings yet
- En TDD-Microcontroller Embo24Document22 pagesEn TDD-Microcontroller Embo24Karthik KichuNo ratings yet
- ICM Scripting Troubleshooting Tools and MethodsDocument23 pagesICM Scripting Troubleshooting Tools and MethodsRogelio Ramirez MillanNo ratings yet
- Discovery 21: Configure and Verify Flexible NetflowDocument5 pagesDiscovery 21: Configure and Verify Flexible NetflowIonut StanciuNo ratings yet
- Pic16f628a GSM SmsDocument6 pagesPic16f628a GSM SmsSake gtrNo ratings yet
- CS-393 Lab 4Document3 pagesCS-393 Lab 4malekhammami6No ratings yet
- DS Zadaci PDFDocument23 pagesDS Zadaci PDFArnela Tatic100% (1)
- Matthew Peters, Robert Hill, Shyam Pather September 1, 1998: Nachos T1 T2Document11 pagesMatthew Peters, Robert Hill, Shyam Pather September 1, 1998: Nachos T1 T2Huynh VangNo ratings yet
- 2.2 StructdesDocument28 pages2.2 Structdesjinto007No ratings yet
- Micro Processor Lab 2 ManualDocument7 pagesMicro Processor Lab 2 ManualXafran KhanNo ratings yet
- Stateful Firewall Lab: Network Security Laboratory 23 May 2016Document55 pagesStateful Firewall Lab: Network Security Laboratory 23 May 2016habib kamaieNo ratings yet
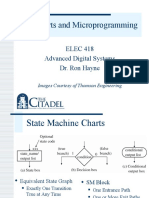
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocument38 pagesSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22No ratings yet
- Experiment 6Document30 pagesExperiment 6sujith_mathewNo ratings yet
- Mos HellDocument23 pagesMos Hellcmtssikar100% (3)
- C HandoutDocument14 pagesC HandoutAsep Bagja NugrahaNo ratings yet
- LCD EEPROM FunctionsDocument2 pagesLCD EEPROM FunctionsMoussa EzzaidNo ratings yet
- PT ScriptDocument5 pagesPT ScriptMatthew N Michelle BondocNo ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- MOSHELL Command DatabaseDocument96 pagesMOSHELL Command DatabaseJorgIVariuS100% (2)
- Lab MicroprocessorsDocument45 pagesLab MicroprocessorsSweetsoulUroojMalikNo ratings yet
- Ex 3 (Openmp - Iii) : Int Alg - Matmul2d (Int M, Int N, Int P, Float A, Float B, Float C)Document8 pagesEx 3 (Openmp - Iii) : Int Alg - Matmul2d (Int M, Int N, Int P, Float A, Float B, Float C)Pratham ShahNo ratings yet
- DMA Rendering and Store Queues With KOS On The Sega DreamcastDocument3 pagesDMA Rendering and Store Queues With KOS On The Sega Dreamcastremache-claxon.0qNo ratings yet
- CCRG Openmp: Experiments and Improvements: Huang Chun & Yang XuejunDocument23 pagesCCRG Openmp: Experiments and Improvements: Huang Chun & Yang XuejunaptureincNo ratings yet
- Which Line(s) in The Program Below Contain The Following?Document6 pagesWhich Line(s) in The Program Below Contain The Following?Jasper LimNo ratings yet
- Cisco IOS IP SLA and EEM ScriptDocument5 pagesCisco IOS IP SLA and EEM ScriptyasserNo ratings yet
- Crypto Kernel API Framewor1Document28 pagesCrypto Kernel API Framewor1hohungduyNo ratings yet
- Encoder Check PLC ProgramsDocument3 pagesEncoder Check PLC Programsanacer55No ratings yet
- My Experiments: Opencl Gpu Matrix Multiplication ProgramDocument19 pagesMy Experiments: Opencl Gpu Matrix Multiplication Programsurajkr23No ratings yet
- ICEE Tutorial 2014 PDFDocument82 pagesICEE Tutorial 2014 PDFAshwani JhaNo ratings yet
- Devi Ever Diy Info Manual, Aw Heck YesDocument20 pagesDevi Ever Diy Info Manual, Aw Heck YesRiley Smith75% (4)
- Print Options User Guide (SAP NetWeaver 7.0)Document19 pagesPrint Options User Guide (SAP NetWeaver 7.0)Bhalchandra RupeNo ratings yet
- SIS Safety ManualDocument62 pagesSIS Safety ManualMohd FirdausNo ratings yet
- Blank QuizDocument19 pagesBlank QuizAnnie Lou AbrahamNo ratings yet
- Calvert Curriculum Catalog - Fundamentals of Programming and SWDDocument5 pagesCalvert Curriculum Catalog - Fundamentals of Programming and SWDSue Adames de VelascoNo ratings yet
- Matthew Canty .Net Developer CVDocument2 pagesMatthew Canty .Net Developer CVMatthew CantyNo ratings yet
- Consolidated Framework and Exam RoadmapsDocument11 pagesConsolidated Framework and Exam RoadmapsNguyen Hoang AnhNo ratings yet
- The Transistor As A SwitchDocument8 pagesThe Transistor As A Switchmajstor100% (1)
- Dualcam DatasheetDocument1 pageDualcam DatasheetBenjamim LangaNo ratings yet
- Operating System: Presented By:-Dr. Sanjeev SharmaDocument277 pagesOperating System: Presented By:-Dr. Sanjeev SharmaAryan KumarNo ratings yet
- Image PruningDocument69 pagesImage Pruningnarendran kNo ratings yet
- SII ManualDocument47 pagesSII ManualMike SharpeNo ratings yet
- Instalación Oracle Developer Suite 11g 64-Bit WindowsDocument26 pagesInstalación Oracle Developer Suite 11g 64-Bit WindowsDaniel Padilla AguilarNo ratings yet
- Fsa 00-30-019 r01 A OperacionalDocument5 pagesFsa 00-30-019 r01 A OperacionalJefferson CaizaNo ratings yet
- Firepower FMC PDFDocument8 pagesFirepower FMC PDFnelsonjedNo ratings yet
- RemoteNetBackup User Manual (V2.0)Document23 pagesRemoteNetBackup User Manual (V2.0)varaprasadgcn1No ratings yet
- The 8085 Microprocessor ArchitectureDocument26 pagesThe 8085 Microprocessor ArchitecturesantoshobraNo ratings yet
- IE1204 Digital Design F11: Programmable Logic, VHDL For Sequential CircuitsDocument68 pagesIE1204 Digital Design F11: Programmable Logic, VHDL For Sequential CircuitsAhmad AliNo ratings yet
- Windows Direct Sound Set Up PDFDocument2 pagesWindows Direct Sound Set Up PDFFrancescoNo ratings yet
- Burden PBVC-8 - SokenDocument6 pagesBurden PBVC-8 - SokenEdgar JimenezNo ratings yet
- 55-052 Releasing Control Module: Installation InstructionsDocument2 pages55-052 Releasing Control Module: Installation Instructionsjunioralamo17No ratings yet
- UTFT Supported Display Modules & ControllersDocument4 pagesUTFT Supported Display Modules & ControllersJohn MarinNo ratings yet
- Dual USB High-Side Power Switch: SP2526A AdvancedDocument10 pagesDual USB High-Side Power Switch: SP2526A AdvancedWelleyNo ratings yet
- Python Programming & SQLDocument152 pagesPython Programming & SQLVinay Patel100% (1)
- Ibm Ds8000Document774 pagesIbm Ds8000jos3r31No ratings yet
- Online Shopping SystemDocument12 pagesOnline Shopping SystemAshwin RathodNo ratings yet
- Mil HDBK 284 - 2Document323 pagesMil HDBK 284 - 2sleonNo ratings yet
- FortiAnalyzer-6.2-VMware ESXi CookbookDocument22 pagesFortiAnalyzer-6.2-VMware ESXi Cookbookprash09No ratings yet
- HY LiTE 2 System PDFDocument2 pagesHY LiTE 2 System PDFIndra AditamaNo ratings yet
- Learn Power BI: A beginner's guide to developing interactive business intelligence solutions using Microsoft Power BIFrom EverandLearn Power BI: A beginner's guide to developing interactive business intelligence solutions using Microsoft Power BIRating: 5 out of 5 stars5/5 (1)
- Linux For Beginners: The Comprehensive Guide To Learning Linux Operating System And Mastering Linux Command Line Like A ProFrom EverandLinux For Beginners: The Comprehensive Guide To Learning Linux Operating System And Mastering Linux Command Line Like A ProNo ratings yet
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Skulls & Anatomy: Copyright Free Vintage Illustrations for Artists & DesignersFrom EverandSkulls & Anatomy: Copyright Free Vintage Illustrations for Artists & DesignersNo ratings yet
- The Designer’s Guide to Figma: Master Prototyping, Collaboration, Handoff, and WorkflowFrom EverandThe Designer’s Guide to Figma: Master Prototyping, Collaboration, Handoff, and WorkflowNo ratings yet
- NFT per Creators: La guida pratica per creare, investire e vendere token non fungibili ed arte digitale nella blockchain: Guide sul metaverso e l'arte digitale con le criptovaluteFrom EverandNFT per Creators: La guida pratica per creare, investire e vendere token non fungibili ed arte digitale nella blockchain: Guide sul metaverso e l'arte digitale con le criptovaluteRating: 5 out of 5 stars5/5 (15)
- Tableau Your Data!: Fast and Easy Visual Analysis with Tableau SoftwareFrom EverandTableau Your Data!: Fast and Easy Visual Analysis with Tableau SoftwareRating: 4.5 out of 5 stars4.5/5 (4)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Animation for Beginners: Getting Started with Animation FilmmakingFrom EverandAnimation for Beginners: Getting Started with Animation FilmmakingRating: 3 out of 5 stars3/5 (1)
- Architectural Design with SketchUp: 3D Modeling, Extensions, BIM, Rendering, Making, and ScriptingFrom EverandArchitectural Design with SketchUp: 3D Modeling, Extensions, BIM, Rendering, Making, and ScriptingNo ratings yet
- Blender 3D for Jobseekers: Learn professional 3D creation skills using Blender 3D (English Edition)From EverandBlender 3D for Jobseekers: Learn professional 3D creation skills using Blender 3D (English Edition)No ratings yet
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- How to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyFrom EverandHow to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyRating: 4 out of 5 stars4/5 (27)
- Excel : The Ultimate Comprehensive Step-By-Step Guide to the Basics of Excel Programming: 1From EverandExcel : The Ultimate Comprehensive Step-By-Step Guide to the Basics of Excel Programming: 1Rating: 4.5 out of 5 stars4.5/5 (3)
- AI Monetization of your Faceless YouTube Channel: Ai Side Hustle NicheFrom EverandAI Monetization of your Faceless YouTube Channel: Ai Side Hustle NicheNo ratings yet
- Autodesk 3ds Max 2020: A Detailed Guide to Modeling, Texturing, Lighting, and RenderingFrom EverandAutodesk 3ds Max 2020: A Detailed Guide to Modeling, Texturing, Lighting, and RenderingRating: 5 out of 5 stars5/5 (4)
- Photoshop: A Step by Step Ultimate Beginners’ Guide to Mastering Adobe Photoshop in 1 WeekFrom EverandPhotoshop: A Step by Step Ultimate Beginners’ Guide to Mastering Adobe Photoshop in 1 WeekNo ratings yet
- YouTube Takeover - How You Can Grow Your YouTube Channel Into A Regular IncomeFrom EverandYouTube Takeover - How You Can Grow Your YouTube Channel Into A Regular IncomeRating: 4 out of 5 stars4/5 (2)