You might also like
- Simonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperDocument10 pagesSimonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperAkshay PratapNo ratings yet
- 3D Shape Analysis Using MeshCNN: A Review and ImprovementDocument6 pages3D Shape Analysis Using MeshCNN: A Review and ImprovementhsisjNo ratings yet
- Graph Theoretic Methods in Multiagent NetworksFrom EverandGraph Theoretic Methods in Multiagent NetworksRating: 5 out of 5 stars5/5 (1)
- Rocco Convolutional Neural Network CVPR 2017 PaperDocument10 pagesRocco Convolutional Neural Network CVPR 2017 PaperAkshay PratapNo ratings yet
- Graph Transformer Networks: Corresponding AuthorDocument11 pagesGraph Transformer Networks: Corresponding Authorvadim fustiiNo ratings yet
- An Approch For Representation of Node Using Graph Transformer NetworksDocument13 pagesAn Approch For Representation of Node Using Graph Transformer NetworksIJRASETPublicationsNo ratings yet
- Learning 3D Reconstruction in Function SpaceDocument11 pagesLearning 3D Reconstruction in Function SpaceQinan ZhangNo ratings yet
- 3.IJAEST Vol No 5 Issue No 2 Content Based 3D Model Classification Using Geometric Graph Representation 116 122Document7 pages3.IJAEST Vol No 5 Issue No 2 Content Based 3D Model Classification Using Geometric Graph Representation 116 122iserpNo ratings yet
- IJCI - Volume 8 - Issue 2 - Pages 109-114Document6 pagesIJCI - Volume 8 - Issue 2 - Pages 109-114John RootNo ratings yet
- Discriminative Regularized Deep Generative Models For Semi-Supervised LearningDocument10 pagesDiscriminative Regularized Deep Generative Models For Semi-Supervised LearningchanceNo ratings yet
- Deng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperDocument11 pagesDeng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperVivian LiNo ratings yet
- A Graph-Based Approach For Trajectory Similarity Computation in Spatial NetworksDocument9 pagesA Graph-Based Approach For Trajectory Similarity Computation in Spatial NetworksPeng HanNo ratings yet
- Hashimoto Normal Estimation For Accurate 3D Mesh Reconstruction With Point Cloud CVPRW 2019 PaperDocument10 pagesHashimoto Normal Estimation For Accurate 3D Mesh Reconstruction With Point Cloud CVPRW 2019 PaperRicardo GarciaNo ratings yet
- Choy 2019Document9 pagesChoy 2019adsxzNo ratings yet
- Graph Embedding and ApplicationDocument33 pagesGraph Embedding and ApplicationAnh Vuong TuanNo ratings yet
- 3d Iccv17Document10 pages3d Iccv17Huy Nguyễn BảoNo ratings yet
- Revisiting Document Image Dewarping by Grid RegularizationDocument10 pagesRevisiting Document Image Dewarping by Grid RegularizationCláudioNo ratings yet
- Axioms 11 00112Document23 pagesAxioms 11 00112nach456No ratings yet
- Rendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesDocument17 pagesRendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesAyhan MUCURNo ratings yet
- Paper 13Document10 pagesPaper 13Andrea CalíNo ratings yet
- Convolutional Mesh Regression For Single-Image Human Shape ReconstructionDocument10 pagesConvolutional Mesh Regression For Single-Image Human Shape Reconstruction7ddv29qw89No ratings yet
- 1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperDocument9 pages1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperxuhangmkNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- SegContrast_3D_Point_Cloud_Feature_Representation_Learning_Through_Self-Supervised_Segment_DiscriminationDocument8 pagesSegContrast_3D_Point_Cloud_Feature_Representation_Learning_Through_Self-Supervised_Segment_Discriminationmishraaryan846No ratings yet
- (IJIT-V7I2P8) :D. Jeni Jeba Seeli, Dr.K.K.ThanammalDocument6 pages(IJIT-V7I2P8) :D. Jeni Jeba Seeli, Dr.K.K.ThanammalIJITJournalsNo ratings yet
- Real-Time Salient Object Detection With A Minimum Spanning TreeDocument9 pagesReal-Time Salient Object Detection With A Minimum Spanning TreeSaeideh OraeiNo ratings yet
- Nguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperDocument10 pagesNguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperVictor LöfgrenNo ratings yet
- Download Graph Neural Networks For Efficient Learning Of Mechanical Properties Of Polycrystals Jonathan M Hestroffer full chapterDocument31 pagesDownload Graph Neural Networks For Efficient Learning Of Mechanical Properties Of Polycrystals Jonathan M Hestroffer full chapterarlene.fortenberry499100% (4)
- Download Graph Neural Networks For Efficient Learning Of Mechanical Properties Of Polycrystals Jonathan M Hestroffer full chapterDocument31 pagesDownload Graph Neural Networks For Efficient Learning Of Mechanical Properties Of Polycrystals Jonathan M Hestroffer full chapterarlene.fortenberry499100% (3)
- Multiresolution Mesh Morphing Technique for Arbitrary TopologyDocument8 pagesMultiresolution Mesh Morphing Technique for Arbitrary TopologyFathan Kenshin HimuraNo ratings yet
- Semantic Segmentation For Line Drawing Vectorization Using Neural NetworksDocument10 pagesSemantic Segmentation For Line Drawing Vectorization Using Neural NetworksViolet WindNo ratings yet
- Pattern Vectors From Algebraic Graph TheoryDocument14 pagesPattern Vectors From Algebraic Graph TheorylennartkrassNo ratings yet
- Mesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyDocument11 pagesMesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyRakeshconclaveNo ratings yet
- File 1635586830 110340 SHAPESNANIMATIONDocument10 pagesFile 1635586830 110340 SHAPESNANIMATIONdevansh gargNo ratings yet
- Translating Numerical Concepts for PDEs into Neural Architectures: Connecting Algorithms and ArchitecturesDocument12 pagesTranslating Numerical Concepts for PDEs into Neural Architectures: Connecting Algorithms and ArchitecturesAman JalanNo ratings yet
- Josaa 38 1 60Document11 pagesJosaa 38 1 60AmanNo ratings yet
- Progressive Meshes: Hugues HoppeDocument10 pagesProgressive Meshes: Hugues HoppeJorge AlmiNo ratings yet
- Depth Estimation From Single Image Using CNN-Residual NetworkDocument8 pagesDepth Estimation From Single Image Using CNN-Residual NetworkBora CobanogluNo ratings yet
- Diff ShaderDocument12 pagesDiff Shaderds0313No ratings yet
- A Novel 3D Skeleton Algorithm Based On Neutrosophic Cost FunctionDocument8 pagesA Novel 3D Skeleton Algorithm Based On Neutrosophic Cost FunctionMia AmaliaNo ratings yet
- Grammar-Based 3D Facade Segmentation and ReconstructionDocument10 pagesGrammar-Based 3D Facade Segmentation and ReconstructionDuncan Dunn DundeeNo ratings yet
- Li Supervised Fitting of Geometric Primitives To 3D Point CloudsDocument9 pagesLi Supervised Fitting of Geometric Primitives To 3D Point CloudsYawkal AddisNo ratings yet
- Yang 20 ADocument16 pagesYang 20 AArielIporreRivasNo ratings yet
- MeshNet - Mesh Neural Network For 3D Shape RepresentationDocument9 pagesMeshNet - Mesh Neural Network For 3D Shape Representationalt.s2-8hnmzegNo ratings yet
- A - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Document13 pagesA - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Mustafa Mohammadi GharasuieNo ratings yet
- Image Restoration by Learning Morphological Opening-Closing NetworkDocument21 pagesImage Restoration by Learning Morphological Opening-Closing NetworkMuhammad Awais ShahNo ratings yet
- Information Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin WangDocument20 pagesInformation Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin Wangazazel17No ratings yet
- Multi Distance Metric Network For Few Shot Learning: Farong Gao Lijie Cai Zhangyi Yang Shiji Song Cheng WuDocument12 pagesMulti Distance Metric Network For Few Shot Learning: Farong Gao Lijie Cai Zhangyi Yang Shiji Song Cheng WuJavier RojasNo ratings yet
- Micromesh ConstructionDocument18 pagesMicromesh ConstructionWitchcraftNo ratings yet
- NeuralFusion Online Depth Fusion in Latent Space CVPRDocument11 pagesNeuralFusion Online Depth Fusion in Latent Space CVPRHarre Bams Ayma ArandaNo ratings yet
- Angular Triplet-Center Loss For Multi-View 3D Shape RetrievalDocument8 pagesAngular Triplet-Center Loss For Multi-View 3D Shape RetrievalTony LeeNo ratings yet
- Slicing 1Document7 pagesSlicing 1Brandon KohnNo ratings yet
- Local-Global Fuzzy Clustering With Anchor GraphDocument15 pagesLocal-Global Fuzzy Clustering With Anchor Graphpakardizavand.naserNo ratings yet
- Convolutional Knowledge Graph EmbeddingsDocument8 pagesConvolutional Knowledge Graph Embeddingsphanpeter_492No ratings yet
- Liao and Smidt - 2022 - Equiformer Equivariant Graph Attention TransformerDocument25 pagesLiao and Smidt - 2022 - Equiformer Equivariant Graph Attention Transformer1045013245leoNo ratings yet
- Lyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperDocument10 pagesLyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperArmandoNo ratings yet
- Tensor Voting: Theory and Applications: Gérard Medioni Chi-Keung Tang Mi-Suen LeeDocument10 pagesTensor Voting: Theory and Applications: Gérard Medioni Chi-Keung Tang Mi-Suen LeeM Rameez Ur RehmanNo ratings yet
- Learning Mesh-Based Simulation 2010.03409Document18 pagesLearning Mesh-Based Simulation 2010.03409carlosedubarretoNo ratings yet
- Global 2 IDNS - PLC CommissioningDocument16 pagesGlobal 2 IDNS - PLC CommissioningCesar ChaconNo ratings yet
- M I M Nafrees QSDocument2 pagesM I M Nafrees QSnafreesmimNo ratings yet
- Prashant KumarDocument47 pagesPrashant KumarAftab AhmadNo ratings yet
- E-mail Encryption Project ReportDocument15 pagesE-mail Encryption Project Reportishant7890No ratings yet
- Unit 4 BiostatisticsDocument17 pagesUnit 4 BiostatisticsअभिषेकNo ratings yet
- Sydney Opera HouseDocument2 pagesSydney Opera HouseMache SebialNo ratings yet
- CDP Report FormatDocument2 pagesCDP Report FormatSajath SabryNo ratings yet
- Electric MachineDocument26 pagesElectric MachinealexNo ratings yet
- Volume II - PEFA Assessment Fieldguide (Second Edition) - Public Expenditure and Financial Accountability (PEFA)Document3 pagesVolume II - PEFA Assessment Fieldguide (Second Edition) - Public Expenditure and Financial Accountability (PEFA)Thomas nyadeNo ratings yet
- Information IntegrationDocument2 pagesInformation Integrationjohn949No ratings yet
- Heart Clinical Case by SlidesgoDocument53 pagesHeart Clinical Case by SlidesgoUlfa Sari Al-BahmiNo ratings yet
- Act Sheet For RoboticsDocument4 pagesAct Sheet For RoboticsErah Kim GomezNo ratings yet
- Lubricated Plug Valves: Price List #3119 - Effective: 3/1/19Document16 pagesLubricated Plug Valves: Price List #3119 - Effective: 3/1/19nurhadiNo ratings yet
- AIRPORTS AUTHORITY OF INDIA I CardDocument2 pagesAIRPORTS AUTHORITY OF INDIA I Cardkallul5551350100% (1)
- P 11.4A Pressurization System InspectionDocument3 pagesP 11.4A Pressurization System Inspectioncrye shotNo ratings yet
- Lecture - Week - 3 - Software MetricsDocument29 pagesLecture - Week - 3 - Software MetricsManlNo ratings yet
- Good To Great by Jim CollinsDocument6 pagesGood To Great by Jim Collinsbubasyla33% (6)
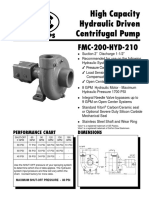
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- BSBPMG540 Task 2 Knowledge Questions V1.1121-SV049116-MarianaVargasGarciaDocument5 pagesBSBPMG540 Task 2 Knowledge Questions V1.1121-SV049116-MarianaVargasGarciaRahmi Can ÖzmenNo ratings yet
- A Colony of Blue-Green Algae Can Power A Computer For Six MonthsDocument4 pagesA Colony of Blue-Green Algae Can Power A Computer For Six MonthsDr Hart IncorporatedNo ratings yet
- Project Managemen 2 PDFDocument14 pagesProject Managemen 2 PDFMisha RanaNo ratings yet
- What is a 50/50 in minesweeperDocument7 pagesWhat is a 50/50 in minesweeperGannon GageNo ratings yet
- Test Procedure Offer 019-14V 3015Document5 pagesTest Procedure Offer 019-14V 3015sohaibNo ratings yet
- Colas Rail Brochure CORPORATE v4 0Document28 pagesColas Rail Brochure CORPORATE v4 0mostafa shoshaNo ratings yet
- Structure of A C++Document3 pagesStructure of A C++All TvwnzNo ratings yet
- 056-123 Simulation Injection TestingDocument6 pages056-123 Simulation Injection TestingRoxanneNo ratings yet
- Gear Ratio Application Chart 150-151Document2 pagesGear Ratio Application Chart 150-151Gustavo MosqueraNo ratings yet
- Virtual Campus Tour Gets Positive Student FeedbackDocument6 pagesVirtual Campus Tour Gets Positive Student Feedbacksuwarno -No ratings yet
- Scania 5-Series Engine Inspection ManualDocument275 pagesScania 5-Series Engine Inspection Manualgiovani martinsNo ratings yet
- Unit 25 Sound RecordingDocument21 pagesUnit 25 Sound Recordingapi-480389176No ratings yet
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.From EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.No ratings yet
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesFrom Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesNo ratings yet
- 1200+ AI Prompts for Everyone.: Artificial Intelligence Prompt Library.From Everand1200+ AI Prompts for Everyone.: Artificial Intelligence Prompt Library.No ratings yet