PERMANENT TECHNICAL COMMITTEE II
(Maritime ports ans seaways for commercial,
fishery and pleasure navigation)
REPORT OF WORKING GROUP 3-a)
«NAVIGATION IN MUDDY AREAS »
Excerpt from Bulletin N° 43 (1982/1983)
of
the PERMANENT INTERNATIONAL ASSOCIATION OF NAVIGATION CONGRESSES
General Secretariat : Résidence Palace, Quartier Jordaens,
rue de fa Loi 155 — 1040 Brussels (Belgium)
Al copytights reserved.
NAVIGATION IN MUDDY AREAS:
PERMANENT TECHNICAL COMMITTER 11
(Maritime ports and seaways for commercial, fishery & pleasure navigation)
REPORT OF WORKING GROUP N* 3)
CONTENTS:
1. ntrodvetion
UL Deliation of nautical depth
Im, Effect on manceuveaility
IV, Measuring methods and presentation
1. Conclusions and recommendations
1 INTRODUCTION.
In many parts of the world fluidsmud suspensions exlat
fon the bottorn of navigational channels which create
‘ifficulties in defining the navigational depth. When lead
tines were used, the depth recorded was toa fairly solid
bottom and any overlying smut layer was not usually
detected. When echo
water-mud interface was not always cleatly defined. The
Sounders were introduced, the
lnterfoce shown en the records may depend on the
Insieument used and the feequency employed. The lack of
clear definition of
unecessary depth
cocaine.
During the 25th PLAS.
May 1981, a working group was Cerined under the auspices
of the Perinanent Technical Committee I co prepare a
short report which was £9 include +
watered interface can cause
restriction and possibly excessive
Congress in Edinburgh in
6. A definition of the tem nautical depts
2 Methods of measuring the characteristics of bottom
layers
3. A description of the effect of muddy layers on the
snanceuveabllty of ships
The terms of caference were reworded in the
following way + "To give clear definition of novigable
pth in soft bed areas, to describe factors affecting this
depth and to recommend survey techniques and chart
presentation". The work of she group took about one ané a)
hall years, ducing which time two plenary meetings were
hele, The Working Group consstad of, in glphabetie order
= 3.U, Brolsma, Havenbesrif dee Gemeente Rotterdam, the
Netherlands (Chairman fom 1-1-1982).
= 3B. Heebich, Aa
Engineering Program, College Station, Texas, USA,
= Wal, Jackson, British Transport Docks Board Research
Station, Southall, England.
= GW, Kell, Wasser und Schlffahetadiretion Nord Kiel,
Germany (.R.
Texas Gniversty, Ocean
=P. Kerckaert, Ministerie van Openbare Werken, Dienst
der Kust, Oostende, Betgivn.
= Ls Nederlol, Gemeentewecken Retterdamn, the Netherlands
(Chaleman til 1-1-1982).
and was assisted by +
= LA, Hellena, Rijiswaterstagt irectie Benedenrvieren,
Dordrecht the Netherlands.
‘This report summarizes presentday inowledge and
research 4 continuing into this complex phenomenon.
|. DEFINITION OF NAUTICAL DEPTH,
Nautical depin is defined as the maximum depth with
respect to chart datum which, for navinational purposes, is
considered sale to accept as the bed of the channel, In
arriving at a delinition of the bed the two following
criteria need 10 b6 net =
1) The ship's ull must suffer no dainage even if its draft
weve {0 reach the full nautieat depth,
2) The navigational response of the vessel vast not be
adversely aitected,
The list criterion is met provided the bed material
Js fluid and. the shear sess not excessive whilst the
second criterion depends on 4 umber of other properties
oF the smud including density and the generation of waves
between the water and flvid sud,
Although these and other factors affect ship navigation it
Is necessary for the practical purpose of hydrographic
surveying 10 choose a physical property. whicn can be
measured felauvely easily under the marine environment
and which can also be used a8 a criterion for establishing
the navtical depth, The parameter most widely used is
Specific gravity of the bed material
UL the specitic gravity Is to be used as the criterion
for the mautical depth, then st is necessary 10 select a
value which is considered safe under the conditions which
are known to exist in 9 particular area, An underkee!
Clearance ef 1D % or more is often demanded in a
‘channel and this ir usally sufficient to ensure that the
Ship's bull never actualy comes into contact with the
fluid oud suspension, A lesser underkeel clearance may be
acceptable when a Ship le moving ats slow speed in a.
cealm area such a¢ within a dock and parteularly if the
movement Is tug assisted, There are cases where ships
have moved without damage even where the ship's keel is
2
within. the luis suspension, At a tidal berth where the
vessel is required to float in a dredged pocket, only
‘moving around high water, a grester value of the density
may be taken for defining the eds In the latter ase the
taking of mud inta the cooling water intakes can be a
problem.
1.0 tm can be aided to the oautical depth or if a specific
gravity of 1.3 were accepted as much as 13 m can be
Before specifying a safe value for the acceptable
specific gravity of the mud, it is necessary to have
studied the area in detail 39 that the relationship between
the shear properties of the fled mud
land its specilic gravity are known. This
‘can vaty between one place and another
depending upon a cumber of factors
‘mineralogical composition,
‘organic content and particle size. Tests
ccaried cut by the Belgian Cosstal,
Department on samples of lity material
inetuding
encountered off Zeebrugge at lfterent
times gave for the same value of the
specie gravity of the mud different
relationships between the shear stress
required for the inception of movement
‘he ini
lgicity and the sand/silt ratio (see fig
Di A particle size of 80 ¥ was used as
te boundary between sand and sit. The
particle size distribution can vary a5 a
esult of seasonal changes due to
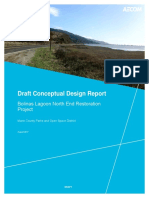
Fig. 1 = Comparison of density profiie and tanker oross-ssotion to
{Tineteate the sonsepe of nautical depths
A diagraiamatic representation of
4 typical crose section theough the bes
of the entrance channel ia. Rotterdam
is shown in fig. 1 and the boundary
between the area marked loose silt and
the scea of consolidated silt is defines
by a specitic gravity of 1.2, This value
of specie gravity is then used to
detine the bed inthis channel. One
felationship between specie gravity
and depth elected from many
rmoaturements taken in the enclosed
‘dock at Immingham on the Humber ie
shown in tgs 2. The upper trace trom
he echo. rounder chart is sean to be
the result of reflection from the
Interface between the sea water and
the top of the low density. tuid
shown in se dlagram, is retlction
from the well consolidated bed. The
Upper trace thus gives 00 low a value
water depth (a)
for the nautical epth and the lower
trace too high a value. The safe value
for the nwutical depth lies somewnere
Referring again to tig. 2 if a
specific gravity of 1.2 is taken as the
limit of acceptable depth rather than
the first rellection of the echo trace
2
specific gravity of bedmaterial
= depth recorded by echosounder ~ upper trace
a= depth recorded by echosounder ~ lower trace
Pies 2 - Temingnan dook entrance bed cenesty survey 1975
ris
= gle
Uf + -lo09 %
1a
wa CSS a as te
Fig. 3. = Relation between eigigity and apocttic gravity for
‘ifferent nue conpoeitions in Zoebdrugge ans Rotterdam
captions 1s © initial rigidity
Il, EFFECTS ON MANOEUVRABILITY.
From model and full size tests at
the Port of Rotterdam it appeared that
the presence of a layer of silt greatly
Influences the resistance encountered by
the moving vessel. The increased
resistance which proves not
directly proportional tothe av
underkeel clearance above the silt ler
neccesitates an increase up to 30%
propeller revolutions to maintain a
constant speed. The Increase in
resistance is at least partly due 1 a
wave generated at the interface of the
water and the silt suspension, ft was
found that mo essential diferences
occurred when navigating with an
Lunderkeel clearance of 10 % above the
silt and with a negative underkee!
clearance of 3% The sneximum elfect
coincides with a clearance of about 3%
‘shove the siltiwater interface when in
‘addition to the resistance crested by the
internal wave, the vessel encounters
resistance caused by the high water
velocity beneath che ull, In this
situation a larger rudder angle is
cequired for the same ship response and
In some cases rudder control alone may
ot be sulficient, The deficiency can,
however, be corrected by increasing the
propeller speed or by tug. assistance,
both of which are more effective at low
speeds. Generally speaking, less problems
will be eacountered when navigating in a
Grright tine over alt than when
executing 2 turn It sould be pointed
fut that when executing a 20" J 20°
vigzag mancewee, the ack width
reduces with increasing underkeet
clearance and silt layer thickness.
‘The Rotterdam tals showed
marimar effect at a sile layer thickness
of 2.5 m and an undeckee! clearance of
3% above the silwater interface when
3, concentration of dry sedinent the corresponding track width is less
Degy = volune-naa9 of saturated sedtnent than that required when navigating ina
tree area. The presence of a si
layer so reduces the stopping distance,
the squat and the trim of the vessel all
temperature, fresh water flow, very high tides, waves, af which are favourable.
surges etc: Therefore measurements need to be taken over
Comparison of the nautical behaviout of ships in
| long period before a sale specific gravity can be chosen
Situations with and without the silt layer showed tat
with confidences where a silt layer i present +
= the resistance is much grester, requiring higher propelle
rewshtions
substantially reducing the stopping cistance;
= in general, dynamic movetnents (course change) will be
faster, statle movements (leeward velocity, rift ans
turing, velocity) will stow downs
= the etfectiveness of the rudder for a. pven propeller
RPM is reduced, => the turing eltele increasess
= when navigating a tum at the wsisl speed of about 5
nots, an additional angle of about
requiced at the most compared with clear
whereas at lower Speeds there is nocd for a
considerably greater rudder angle:
= when navigating on a straight course, the ship will show
rudder thus reducing. the
eequires track widths
= the applying of a power surge for increase in rudder
ellectiveness results in a lesser increase in speed of the
response tothe
hip, 20 that moce surges can be applied:
= the squat and trim ere less
Fullescale invert
behaviour of deep staught tankers were necessarily tinited
Felationships between
underkee! clearance and silt layer wickness
behaviour,
could be deduced. It was, however, established that
navigating with « reduced underkeel clearance above the
silt aid not necessarily result in 2 reduction in the
‘manoeuvring capability. Fer practical plication itis
considered estonia that pilots and ship masters should
become fully informed shout changes in oautical behaviour
fof thelr vessel im muddy channels in addition tothe
formal information about channel! depth and density
WV, METHODS OF MEASURING SPECIFIC GRAVITY AND)
ITS. PRESENTATION.
During the Intensive research undertaken in recent
years, several setheds 10 determine the specitic gravity of
the silt layer have Seen developed,
‘The Tist was to analyse samples lo & laboratory but
this method ad the isadvancage of being labour intensive
land. terefore Imposed a severe restriction en the number
of samples that could be taken in the field,
The second probes foe
‘measurement of the specific gravity in situ, The specific
ethos user radioactive
gravity 15 fecotded on the survey vetlel and consequently,
rho samples are needed for laboratory analysis. Some of the
radiation emitted by the source if absorbed by the minture
of water and silt and the balance is received by a
detector. Because absorption increases at the specific
ipravity of the silt increases, the radioactivity. intensity
received by the detector gives a measute of the specitic
gravity of the silt, However, accuracy may be reduced by
pollutants In the silty including heavy metals, organic
substances and gas and a correction will therefore have #9
24
be made if the concentrations of the péllotants are
significant. The instrument needs to be calibrates on a
regular basis.
backscatter probe __tranmecion probe
mupeiplier
eam shield
Sristar aoe
source 7H anions
Fig. = Sonenatio representation of operations
of eadiosctive proves
There are to types of radioactive density. measuring
anes} the transmission type and the backscatter type (se
‘Sq. 8), The teansmission probe is an H-shaped instrument
itn a radioactive source in one leg and a detector in she
ther. The source radiates directly to the detector. The
Iraniiission probe it able to average the specitic qcavity
with a rerolution of 3 cin le depth (which is the height of
the detection crystal. Since the instrument has to sink
into the lt by 48 own weight the —Heshape is a
disadvantage
‘The baclescatter probe is inore robust and contalns the
radioactive source and the detector in single pencibshaped
tube, The Source sends the radiation aut in all deectiont
andthe detector, places above the source and screened
ott from it by a shield, receives only part of ths
ragistion, The backscatter probe registers densities with
the distance between the source
and the detector). Because of its shape this probe
penetrates more easly into the bottom than the
Both probes have been developed by
the Atomic Energy Reseerch Establishment (AERE) at
resolotion of 13 cm (i
transmission probe
Harwell Britain
Extensive Geld tests were performed on his,
equipment by the hyérograghic survey department of the
Dutch "Rilewaterstaat. The tests resulted in several
rmocifications 10 the survey vessel and established
method of measuring as indicated in fig. 5.
‘This method involves the lowering of the probe
‘overboard using a hydraulic crane on the survey vessel
14 depth just above the silt layer, From this starting depth
the probe is lowered further at a speed of approximately
15 cm/sec. The specific gravity of the silt layer is
probe's penetration
(which, ve to Its weight, can penertate 2 three 10 four
ccontinseusly measured during the
=
|
|
i
|
|
UL Vda
view rnom ror | | | poor
ae mal
ree
meter thick silt layer) In sdition the angle of inclination
and depth are measured by a clinometer and depth sensor
respectively. The measurements of the depth sensor can be
checked with the echo sounder. The clinometer is used to
determine how long the measurements with the probe
should be continued for since the survey vessel tends to
rift due to wind, waves and curcentsy the angle of
0+ when measurements are discontinued. Spectlc gravity,
obtaining silt specific gravity measuronents at tne Port of
deoth and inclination are recorded on an acy-y plotter on
the survey vessel (ee fit. 6) Initially 30 measurements a
aay made but
Increased to an average of 60 to 70 a dave with peaks of
with experience the number was
op 19 100, The method is now fully operational in the
Rotterdam/Europort area and specitic gravity measurements
are being made weekly. The data is oresented in ifferent
1) For management purpeses the results of the weekly
25
BACKSCATTER GAUGE 7
Figs 6 ~ Record of speattic grevityy 4
specific gravity measorements are added to those of the
weekly soundings.
2) For control of the dredging activites the specilie
gravity data Is presented in specific. qravity/aepth
5) For navigational purposes the information is presented in
the form of nautical charts which are a combination ef
sounding maps (oased on echo soundings) and specific
agravity/depth charts
The information on
itn the following rules +
the nautical depth should comply
= if the depth at a particular place exceeds the terget
pth, the depth recorded by echo sounding will be
carted
= it the echo sounder shows depth which is less than
the target depth but the depth to the chosen specitie
gravity is. greater the target depth, the
target depth will be plotted, Cross hatching shows that
there Is a low specitie gravity suspension above the
target depth;
= if the silt layer of the chosen specific gravity is above
the target depth, the depth of the silt layer is
Indicated on the chart.
than then
Figure 7 shows as example a nautical chart of the
entrance to Rotterdam-Europort. In this case a specific
gravity of 1.2 ie chosen ae boundary between loose and
consolidated silt.
The present methed
the measurements are made at
actual dapth between
Stl has the disedvantage thet
particular points. The
two points is not known and a
straight line variation between the two points is assumed.
‘There lea need for an instrument which could continoousiy
2%
5.
ecotd depths to a prescribed specific gravity.
This woula
profile, which
Principle as the
Fecotdes echoes
rebounding trom
bottom are alee
be possible subbottom
works according to the same
sounder. In addition to. the
fof the upper layers the echoes
the deeper layers of the channel
recorded. To date, a satisfactorily
working subbottom profiler has not been
You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- GHD Aecom Basis of DesignDocument63 pagesGHD Aecom Basis of Designran2315570No ratings yet
- DESIGN CRITERIA For The Port of Galveston To Include Expanding Cruise Terminal Two - 201407171618017518Document33 pagesDESIGN CRITERIA For The Port of Galveston To Include Expanding Cruise Terminal Two - 201407171618017518ran2315570No ratings yet
- 2012 Design Piers&Wharves Loads PDFDocument175 pages2012 Design Piers&Wharves Loads PDFran2315570No ratings yet
- Design Guidelines Introduction PDFDocument8 pagesDesign Guidelines Introduction PDFran2315570No ratings yet
- Situ Testing ConcreteDocument17 pagesSitu Testing Concreteran2315570No ratings yet
- Dredging The Environmental FactsDocument12 pagesDredging The Environmental Factsran2315570No ratings yet
- Impact Response Spectrum For Vessel-Bridge CollisiDocument10 pagesImpact Response Spectrum For Vessel-Bridge Collisiran2315570No ratings yet
- Hydrological and Hydraulic GuidelinesDocument74 pagesHydrological and Hydraulic Guidelinesran2315570No ratings yet
- Manual On Subsurface Investigations (AASTO) - PPTDocument36 pagesManual On Subsurface Investigations (AASTO) - PPTran2315570No ratings yet
- 2009 Vessel Collision For Highway Bridges Aashto GuideDocument228 pages2009 Vessel Collision For Highway Bridges Aashto Guideran2315570No ratings yet
- Research On Bridge Structure Reliability EvaluatioDocument10 pagesResearch On Bridge Structure Reliability Evaluatioran2315570No ratings yet
- D2j7-Cec 202021Document8 pagesD2j7-Cec 202021ran2315570No ratings yet
- Mangroves For Coastal Defence. Guidelines For Coastal Managers & Policy MakersDocument43 pagesMangroves For Coastal Defence. Guidelines For Coastal Managers & Policy Makersran2315570No ratings yet
- 2018 - Dry Docks - Overview of Design and ConstructionDocument12 pages2018 - Dry Docks - Overview of Design and Constructionran2315570No ratings yet
- Draftconceptualdesign-Report 08242017 Full PDFDocument150 pagesDraftconceptualdesign-Report 08242017 Full PDFran2315570No ratings yet
- Marad Post-Dredge Sounding Results - July 2019Document1 pageMarad Post-Dredge Sounding Results - July 2019ran2315570No ratings yet
- Pettys Island Concept DesignDocument29 pagesPettys Island Concept Designran2315570No ratings yet
- 2015 - Navigation Channels - Considerations For Marine Terminals - McWilliams-RT-150508Document39 pages2015 - Navigation Channels - Considerations For Marine Terminals - McWilliams-RT-150508ran2315570No ratings yet