0% found this document useful (0 votes)
2K views20 pagesPLC Practical PDF
Plc
Uploaded by
rajaskn22Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF or read online on Scribd
0% found this document useful (0 votes)
2K views20 pagesPLC Practical PDF
Plc
Uploaded by
rajaskn22Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF or read online on Scribd
- Practical No. 1: Introduction to PLC: This section introduces the concept and basic functions of Programmable Logic Controllers.
- Practical No. 2: PLC Programming: Covers practical steps to program a PLC using handheld and computer interfaces.
- Practical No. 4: Basic Logic Operations: Introduces basic logic operations such as AND, NOT, OR functions within ladder logic diagrams.
- Practical No. 6: Introduction to 8051 Microcontroller: Details the 8051 microcontroller architecture and its features.
Object: Components/sub components of a PLC, learning functions of different modules of g Ploy
ject: .
Theory:
1 PROGRAMMABLE LOGIC CONTROLLER (PLC) is an industrial computer control system
continuously monitors the state of input devices and makes decisions upon a custom propan
to control the state of output devices.
‘Almost any production line, machine function, or process can be greatly enhanced using this
of control system, However, the biggest benefit in using a PLC is the ability to change and replicas
the operation or process while collecting and communicating vital information.
PLCs are designed for multiple input and output arrangements. They can withstand various temperature
ranges, electrical noises, vibrations, and impacts. Integrating a PLC into any production tine
mechanical process is highly beneficial. PLCs enable operation processes to be changed or replicated,
while simultaneously collecting and communicating important information.
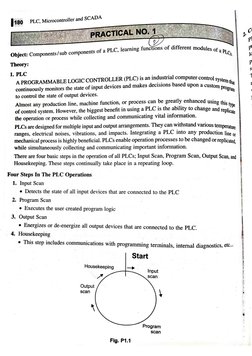
‘There are four basic steps in the operation of all PLCs; Input Scan, Program Scan, Output Scan, and
Housekeeping. These steps continually take place in a repeating loop.
Four Steps In The PLC Operations
1. Input Scan
© Detects the state of all input devices that are connected to the PLC
2. Program Scan
Executes the user created program logic
3. Output Scan
Energizes or de-energize all output devices that are connected to the PLC.
4. Housekeeping
* This step includes communications with Programming terminals, internal diagnostics, etc.
Start
Housekeeping ner
A scan
Output
scan
Program
scan
Fig. P1.1
Practicals
4, Concept of PLC =
PLC Programmable Logic Concept Programmable logic controller is a microprocessor based
ing technique , which is used to perform many functions in industrial iced Programmable
logic controller operates similar to the ordinary controller. But in this system different operation are
performed by software If we want to change program it is only needed to change the program in the
software PLLC takes input instructions in the form of ladder diagram or computer software instructions
‘These instructions are decoded in CPU and CPU provides differed signals to control or to operate
many devices of System When these devices change their position or cause to change controlled
variable. A sample of controlled variable is given to CPU indicate that change in controlled variable
has been eliminated, PLC basically consists of a ladder network, which is performed according
requirements of the system.
Input and output device used in PLC:
(@) Input Device
An input device is a piece of computer hardware equipment used to provide data, and control
signals to an information processing system (IPS). Some examples of input devices include:
© Switches and push buttons
* Sensing devices
«Limit switches
* Proximity sensors
«Photoelectric Sensors
* Condition sensors
© Vacuum switches
‘© Temperature switches
© Level switches
© Pressure switches
(b) Output Devices :
‘An output device is any piece of hardware used fo communicate the results of data processing
cartied out by an IPS, and translate the information into an understandable form.
* Valves ij
* Motor starters
+ Homs and alarms
© Stack lights i
* Control relays
* Pumps
© Printers
© Fans
a SCADA
Microcontroller ané
free Pc
js shown in above figure. Thy
3. Block Diagram FPLC sic controller (PLC) is 8 © PLC
i
‘The block diagram of progr
following basic sections ae-
OM
uo
TO
essor > u | OL—>
—> ree ul
FB To
oe output
Solenoids,
sont contactors,
limit switches, etc. Programming alarms, etc.
device
Fig, P1.2. PLC Block Diagram
(i) Processor section (CPU)
‘The processor section is brain of PLC which consists of RAM, ROM, logic solver and user
memory. The central processing unit is heart of PLC. CPU controls monitors and supervises
all operation within PLC. The CPU makes decision and executes control instructions based
on the program instruction in memory.
(i) Input and output module
The input module is a mediator between input devices and central processing unit (CPU)
which is used to convert analog signal into digital signal.
The output module is a mediator between output devices and central processing unit (CPU)
which is convert digital signal into analog signal. .
Power supply .
P is provi ;
say bine at pa the processor unit, input and output module unit. Power supply
ly mo i
volts. vunted unit. Most of the PLC operates on 0 volts DC and 24
(iv) Memory section
The memory section is the area of the
reieved. Data Memory is wret CPU it which data and information is stored and
re
code data etc. User memory contains sey
ne
Practicals 4834]
Ww Programming device
Programming devices are dedicated devices used for loading the user program into the program
memory or edit it and to monitor the execution of the program of the PLC. It is also used to
troubleshoot the PLC ladder logic program, Hand held terminal (HHT) or dedicated terminal
or personal computer are programming devices commonly used in most of the PLCs.
Result: Hence we learn about PLC, its concept and function of its different module.
rocontroller and SCADA
PRACTICAL NO. 2.)
ee
ing hand bar Zoprammer )
[84 PLC, Mic
Object: Practical steps in
interface.
programming a PLC (#) us
Theory:
ing Hand held programming:
Teg for programming a PLC for a certain application depends on the type of stand
xe procs aes,
en atarer software tool and the type of control application.
Step 1: Analyze and Get the Idea of Control Application ;
‘The primary step to prograin the PLC is to get the idea for which you are going to develop an application,
based program, if you are driving a line follower robot by the use of DC motor when the push bution
is pressed. This status must be displayed by the LED light when the motor gets tun on. The motors
also attached with a sensor (Here it is considered..as another switch) that detects obstacles, so when
this turned on, the motor should be tured off. And correspondingly, if the motor switched off, the
buzzer should be tuned on,
‘Switch
7
|
~ i:
he Design usin,
2 Flowchart
Brine te Mi Motor, A: input Switch 1,
lnies :
Bic is easy with the implementatio,
Fig. P21 PLO Contro} t
Step 2: List All the Conditions and Get Tole
The variables of the above
Buzzer, and the designing of the
below for the above application
Input Switch 2, L:LED and Bu:
n of flow chart, which is give?
Practicals 185]
Switch On A
Switch On C
Switch Of B
Switch OnB — |-_—»}Buzzeris On
Motor is started
and LED is on
Fig. P2.2 Flowchart of PLC Programming
suep3: Open and Configure the PLLC Programming Software
Open the programming software installed in the PC that comes with PLC hardware. Select the hardware
mde] of the PLC in the software and configure it with appropriate input and output modules. Select the
Inder language (LD) from the list of the programming languages, and choose the hardware processor
and give a name for the program.
Fig. P2.3. PLC Programming Software
Step 4: Add and Address Them
the Required Rungs ae
Add the required rungs based on the control application logic and giv
‘very input and outputs. The
re the address 0
adder logic diagram of the above discussed example is given below.
ler and SCADA
PLC, Microcontrol
[196 et 4 etl 4
A
ef} 4
Rung 2
B
Rung 3 aA KEL
c
BOA
Fig, P2.4 Example of Ladder Logic Program
Step 5: Check the Errors and Simulate It
Locate the Online section in the menu bar and select Online. Check for the errors and make necessary
changes after selecting Offiine. Again, go online and select the Run option to simulate. it,
Step 6: Download the Program to PLC CPU Memory
‘After the successful simulation of the program, download the program to CPU by selecting the Download
option through a network or communication cable.
() Using Computer Interface
These five steps will help you in your PLC programming.
(@ Define the task
(ii) Define the inputs and outputs
Gii) Develop a logical sequence of operation
(iv) Develop the PLC program
(v) Test the program
The five steps form the basis of all PLC development.
Result: Hence, we learn some common practical steps in PLC programming
=-4340 TZ,
Practicals 1934]
— opject* Basic logic operations, AND, NOT, OR functions
‘pheory?
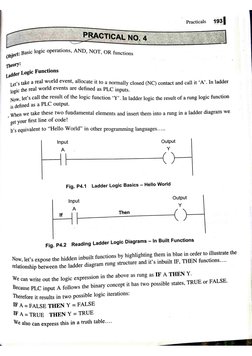
der Logic Functions
i's take a real world event, allocate it to a norms .
lope the real world events are defined as PLC inputs Slog (NC) contac nad salts
Now, let’s call the result of the logic fu “y .
jg defined as a PLC output. inction *Y’. In ladder logic the result of a rung logic function
| When we take these two fundamental elements and insert them into a rung in a ladder diagram we
get your first line of code!
It's equivalent to “Hello World” in other programming languages...
Input Output
7 pet te
4.1 Ladder Logic Basics - Hello World
Input Output
A Y
It Then (
4.2. Reading Ladder Logic Diagrams — In Built Functions
Fig.
tions by highlighting them in blue in order to illustrate the
Now, let’s expose the hidden inbuilt func
rung structure and it’s inbuilt IF, THEN functions...
Telationship between the ladder diagram
g as IF A THEN Y.
We can write out the logic expression in the above as run
‘TRUE or FALSE.
Because PLC input A follows the binary concept it has two possible states,
Therefore it results in two possible logic iterations:
IF A = FALSE THEN Y = FALSE
IF A= TRUE THEN Y = TRUE
We also can express this in a truth table...
[194 PLC, Microcontroller and SCADA
Truth Table
Output
Tnput
iagram we express it symbolically in the form of a
relay coil for the output. Remember the logic flow eh
fq
If we translate this into a ladder logic di
t of current flow in an electric circuit.
‘open (NO) contact for the input and a
left to right and follows the same concep!
‘The ladder logic truth table is shown below.
Ladder Logic Basics Truth Table — Hello World
Output
A Y
—
A= False /--—
A=True }_—__ (
ladder logic there are three more fundamental logic functions
Input
In order to fast track our understanding
that are essential to know.
You may be surprised, but wh
ised, len we combine these thi i i
to program the majority of automation control requireme ee en ele
The three functions are:
1. NOT
2. AND
3. OR
i) Ladder Logic NOT Function
So if PLC input A is FALSE
the result wi
TRUE the result will be FALSE, O° TRUE. And vise versa when PLC input A*
The NOT ion i i
Function is sometimes referred toas reverse Noslecth ;
ic. Check out the truth table below"
If we translate a NOT function into a I
form of @ normally closed (NC) contact
Truth Tat
Practicals 195]
~ NOT Function
—"
Tn
re Output
Y
False
Law ame
= False
ladder logic dia
The ladder logic truth table is shown below.
gram We express it symbolically in the
Ladder Logic Basics Truth Table - NOT Function
A
Not A
False
SE
True
SE
ie
SIE
(ii) Ladder Logic AND Function
The AND function examines multiple PLC inputs and has one resulting output.
If we translate an AND function into a ladder diagram we can express it symbolically in the form
of two normally open (NO) contacts (PLC inputs A and B) and a relay coil (PLC output Y).
They are all connected in line, just like a series connection in an electric circuit.
Input
A B Y
i And Then (
Input
Output
Fig. P4.3 Ladder Logic Basics - AND Function
This time we have also highligl
nted the hidden AND function to illustrate the relationship
between the ladder logic functions and the ladder diagram rung structure.
We can write out the logic expression above as IF A AND B THEN Y.
The AND function examines if all the PLC inputs are T'
also TRUE, However if any one of the PLC inputs is FALSE then the correspo!
also FALSE.
RUE, then the corresponding result is
nding result is
Because PLC input A and B follows the binary concept and are part ofthe AND fonction there
are four possible logis iterations.
—_—_—
196 PLC. Microcontolier and SCADA
Check out the truth table below..
‘Truth Table - AND Function
Input | Owput |
Y
False False False
False True False
True False False
True True True
‘The number of logic iterations increases with the number of PLC inputs (2PLC Inputs), But that
doesn’t matter too much with the AND function because the result can only be TRUE if all
the PLC inputs are TRUE.
If we translate an AND function into a ladder logic truth table we get the table below...
Ladder Logic Basics Truth Table ~ AND Function
Inputs Oui
A B Y
A= False
B = False | 7 \
C }
A= False
B> True ;
Y = False } ( )
Y = False f (
A= True
B= True
Epo
‘Nee
yi) vader Logic OR Function Practicals 1974]
(i
‘the OR function examines multiple PLC in
. puts:
sens an OR function ino a iden ae and has one resulting output.
ram We can,
of two normally open (NO) contacts (PLC inputs A aga ne re symbolically in the form
jnputs are placed in 5 . ind B) and a relay il (PL
‘The inpul Placed in the Tung in what is known as a by *y coil q shania Y).
el connection in an electric circuit, a branch. This is the equivalent of a
‘The output is then connected in line with the run
Bese
Input
” output
= Then cy |
| C} |
Or
Input
B
Fig. P4.4 Ladder Logic Basics - OR Function
This time we have also highlighted the hidden OR function when we create a branch (parallel
connection) with PLC input B across PLC input A.
We can write out the logic expression above as IF A OR B THEN Y.
‘The OR function examines if any of the PLC inputs are TRUE, then the corresponding result
is also TRUE. However, all the PLC inputs must be FALSE in order for the corresponding
result is also be FALSE.
Because PLC input A and
are four possible logic iterations.
Check out the truth table below...
‘ ‘Truth Table - OR Function s
B follows the binary concept and are part of the OR function there
Inputs Output
Y
fh 9 | PLC, Microcontroller and SCADA
Remember, the number of logic iterations increases with the number of PLC inputs (2°Ctapus),
But that doesn't matter too much with the OR function because the result can be TRUE if any
of the PLC inputs are TRUE.
If we translate an OR function into a ladder logic truth table we get the table below
Ladder Logic Basics Truth Table ~ OR Function
Output
Y
Input x3
A= False A t+—- ( J
B = False Input
Y = False B | |
Input
A= False A T (
B= True Input
Y =True B
Input
A=Tnue A
B= False Input
Y=True B
—
a
| 4H
YH
Result:
Hence, we learn about logic operation and, or, not,
el eree hs
[226 PLC. Microcontroller and SCADA
Object: Familiarization of micro controllers (8051) kit.
Theory:
ICROCONTROLLER :
sien: ‘The 8051 is a 8-bit microcontroller planned by
icro-controller has on-chip fringe devices. The * ; ean
mat he vanced for math and single Boolean operations. Its family MCS-51 incorporates 8031,
8051 and 8751 microcontrollers. atta’ st
In spite of it’s moderately, the 8051 is a standout amongst the most mainstres ocontrolles
being used today. Numerous subordinate microcontrollers have subsequent to been produced that
are in view of and perfect'with the 8051. In this way, the capacity to program 8051 is an essential
ability for any individual who arrangements to create items that will exploit microcontrollers.
e
2. FEATURES OF 8051
© 4096 bytes on-chip program memory.
‘* 128 bytes on-chip data memory.
« Four register banks.
128 User defined software flags.
© Two multiple mode, 16 bit timers/counters.
* Hardware Multiple and divide in 4ysec.
‘© 64Kb each program and external RAM addressability.
3. ARCHITECTURE OF 8051
The 8051 microcontroller comprises of CPU, two sorts of memory segments, data and output pots
uncommon capacity registers and control logic required for differem Peripheral functions. Thes¢
components comraunicates with 8-bit information BUS and Bus is Buffered to the outside through 4”
V/O port when memory is fancied,
Practicals 227
External
intomupts
ON-CHIP|
ROM
Bus 40 Serial
ay ‘10 a
bal TP EB nuh]
SOPESE | = sopr PoPi Pa Py THD RXD
“410 30 MHz
Normally 11.0592 MHz fciveoeOate
Fig. P61
4, PIN-OUT OF 8051
‘The 8051 microcontroller is bundled in a 40-pin DIP (Dual Inline Package) . Every microcontroller have
data and output ports. The 8051 has’32 V/O pins arranged as four 8-bit parallel ports (PO, Pl, P2, P3).
Every one of the four ports are bidirectional i.e. every pin will be designed as data or output or both.
Every single port pin are multiplexed with the exception of the pins of portl. Every port comprises of a
hook, a output driver and an information support. The pin description is explained below:
P10 wk
1
Pit 2 P00
P12 3 Pot
p13 4 P02
pia 15 pos
pis 16 Poa
p16 7 a
p17 18 Pos
9 POT,
P30
P3.t
P32
P33 Pay
Fat P26
i P25
P24
P23
P22
P24
2.0
Fig. P6.2
[228 PLC. Microcontroller and SCADA
PORT 1
Pins 1-8 . |
Port 1 pins can be used only as Input and Output /O pins.
PORT 2
Pins 21-28 |
ilized to get to outer memory. Port2 outputs the high request byy,
drives of port2 are uti smory. high re
of be ostside memory address when the location is 16-bits wide, generally Port2is utilized as yg
port.
PORT3
Pins 10-17
All port pins of port3 are multifunctional. They have special functions.
POWER-SUPPLY PINS
8051 operates on D.C power supply of +5v. The +5v is connected to the pins Vec (pin 40) and GND
is connected to the pin 20.
XTAL2 AND XTALI OSCILLATOR }
For generating an internal clock signal, the external crystal oscillator is connected at these two pins. |
|
Ce
18 XTAL2
Cy
18 XTAL1
20 GND
Fig. P6.3
ALE (ADDRESS LATCH ENABLE)
ADO to AD7 lines are multiplexed. To de-multip| i
; = lex these Ii i
address, an external latch and ALE signal of 3051 is used. Tp ae Kr eiaising lover baal
RST (RESET)
The pin is used to reset 8051. For i
$ . For proper reset operation, i i
two machine cycles, when crystal oscillator is running. Perce ast beheld igh a eas
PSEN (PROGRAM STORE ENABLE)
Pin 29 :
Itis the active low output c i to activate able signal of the external RO!
ive lox ontrol signal used tivate the en: ign:
EPROM. It is activated every six oscillator periods while reading the em al may
ternal memory.
ahd
Practicals 2284)
5A (EXTERNAL ACCESS)
pin 31
av the point en BA pin is high Goined with vec), the system gets to address 0000H through
iH are coordinated to interior ROM and project gets to addresses 1000H through FFFFH are
jinated to outside ROM/EPROM. At the point when EA is low (When Ov) all addresses (Q000H_
comEFH) got by project are coordinated to the outside ROM/EPROM.
5, $051 0SC
1n 8051, # macl
ods). Every state is partitioned into two stages (Phas
Mock is dynamic and Phase 2 clock is dynamic amid
¢> exillator periods, (Sate 1, Phase 1) to (Sate 6, Phase 2) of | Hees
1D MHz. Every stage goes on for one oscillator period.
{LLATOR AND CLOCK
hhine cycle comprises of a succession of 6 states numbered $1 to $6 (12 oscillator
e 1 and Phase 2). Amid Phase 1, Phase 1
‘ase 2. A machine cycle comprises Of
if the oscillator recurrence is
1¢——_ One machine cycle
voles ezles[ voor | || rare =| Lv ee =
XTAL
Fig. P6.4
6, Kit Content:
1 x 8051 Development Board with AT89S52 Controller
1 x MAX232 IC
1 x DS1307 IC
« 1.x ULN2003 IC
«1x 16x2 LCD (Female)
« 1x8 Pin Female to Female Connecting Wire”
* 1x3 Pin Female to Female Connecting Wire
« 2.x 4 Pin Female to Female Connecting Wire
© 1x 8051 USBASP Programmer
bout 8051 Microcontroller architecture,
Result: Hence, we learn al pin diagram an its kit.
[230 PLC. Microcontroller and SCADA
PRACTICAL NO. 7
Object: Testing of general input/ output on micro controller board.
Theory:
1. Testing of Input/output Ports:
In this example I will explain how to use I/O ports of ‘8051 microcontroller. Input to the microcontroller
can be given through push button and output can be seen through LED. Firstly all the port pins are
defined. Port 2 is used as output port and port 3 is used as input port. These Ports are initialized with
0 (to write) and 1 (to read) logic respectively. Delay function is used to give the delay in showing
output. Frequency of crystal should be set to 11.059MHz. Program is written in C language using
“Keil”. software and hex file is loaded in the microcontroller.
D1
a Rt
Soy ‘=
— LED-YELLOW
C1 D2
=| ut 2 R2 a
on “pe Shee ubvetiow
* ES ext
.
os > —@: |
RET — LED-YELLOW
R4 D3.
.
©
300. .
—_LED-YELLOW
18
P10 P3.0/AxD} #10
2elory — paampfett
P12 P3.DiNTOLEI2
P13 PaginTifet3
Pid
PLS
P16
PIT
\TESC51
. a
Fig. P7.1
i Practicals 231]
2, WORKING of input output ports 8051 m
‘ . icrocontroller:
When we run the simulation, if first
be ON according to the respective input of
then delay call is passed large integer value,
Programming Code:
#include
sbit Led1 & P20;
sbit Led2 = P241;
sbit Led3 = P22;
sbit Led4 = P23;
sbit Button] = P30; /Defining Button Pins
sbit Button2 = P31;
sbit Button3 = P32;
sbit Button = P343;
‘MDefining LED Pins
void Delay(int); MDelay function declaration
int main ()
{
P2 = 0x00, Hased as.autput port
P3 = OxFF; /used as input port
do
{ 1
if(Button] == 0) INE 1switch pressed
=1 MMst LED ON
Delay(1000);
Ledl = LED OFF
if(Button2 == 0 ) inf 2°switch pressed
Led2 = 1; 172° LED ON
[282 PLC, Microcontroller and SCADA
if(Button3 == 0 )
{
Led3 = 1; /LED ON
Delay(1000); //Delay
Led3 = 0; //LED .QFF
}
if(Button4 == 0 )
{
Led4 = 1; /LED ON
Delay(1000); //Delay
Led4 = 0; //LED OFF
}
while(1);
}
void Delay(int k)
{
int j;
inti;
forlimO;i