You might also like
- EEG-Based Brain-Computer Interfaces: Cognitive Analysis and Control ApplicationsFrom EverandEEG-Based Brain-Computer Interfaces: Cognitive Analysis and Control ApplicationsRating: 5 out of 5 stars5/5 (1)
- Continuous EEG Classification During Motor Imagery-Simulation of An Asynchronous BCIDocument8 pagesContinuous EEG Classification During Motor Imagery-Simulation of An Asynchronous BCIGauri Shanker GuptaNo ratings yet
- P 00092 Scalable Fpga Based SystemDocument12 pagesP 00092 Scalable Fpga Based SystemAkash ThankiNo ratings yet
- 2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputerDocument13 pages2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputernicoNo ratings yet
- Working MemoryDocument8 pagesWorking MemoryAvengingBrainNo ratings yet
- Predicting Metabolic Cost During Human-in-the-Loop-OptimizationDocument1 pagePredicting Metabolic Cost During Human-in-the-Loop-OptimizationHoang PhamNo ratings yet
- EEG - Feature ExtractionDocument5 pagesEEG - Feature Extractiondumperacct123No ratings yet
- Nonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability ToDocument6 pagesNonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability Toİsmail KıyıcıNo ratings yet
- Robust Artifactual Independent Component Classification For BCI PractitionersDocument11 pagesRobust Artifactual Independent Component Classification For BCI PractitionersMahmoudalipourleeNo ratings yet
- Brain Activity in Sleep Compared To Wakefulness: A Meta-AnalysisDocument9 pagesBrain Activity in Sleep Compared To Wakefulness: A Meta-AnalysisDestriNo ratings yet
- EEG Signal Processing For Brain-Computer InterfacesDocument17 pagesEEG Signal Processing For Brain-Computer InterfacesIoana GuțăNo ratings yet
- Abiri 2019 J. Neural Eng. 16 011001Document22 pagesAbiri 2019 J. Neural Eng. 16 011001xiansheng FNo ratings yet
- Brain Learning 1Document8 pagesBrain Learning 1Priscilla MelindaNo ratings yet
- Research Article: EEG Feature Extraction Using Evolutionary Algorithms For Brain-Computer Interface DevelopmentDocument14 pagesResearch Article: EEG Feature Extraction Using Evolutionary Algorithms For Brain-Computer Interface DevelopmentkemetvictNo ratings yet
- Neurocomputing: Davood Fattahi, Behrooz Nasihatkon, Reza BoostaniDocument10 pagesNeurocomputing: Davood Fattahi, Behrooz Nasihatkon, Reza BoostaniJesus LazaroNo ratings yet
- EEG Artifact Removal-State-Of-The-Art and GuidelinesDocument24 pagesEEG Artifact Removal-State-Of-The-Art and GuidelinesYuanXin SuNo ratings yet
- Image-Based Motor Imagery EEG Classification Using Convolutional Neural NetworkDocument5 pagesImage-Based Motor Imagery EEG Classification Using Convolutional Neural Networkapurv shuklaNo ratings yet
- Huang 2018Document13 pagesHuang 2018JuanJosé Solórzano CarrilloNo ratings yet
- Neural Networks: Auke Jan IjspeertDocument12 pagesNeural Networks: Auke Jan IjspeertashimaNo ratings yet
- Generalization Capacity in Artificial Neural Networks - The Ballistic Trajectory Learning CaseDocument6 pagesGeneralization Capacity in Artificial Neural Networks - The Ballistic Trajectory Learning CaseTaylor MontedoNo ratings yet
- Brain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianDocument5 pagesBrain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianShafayet UddinNo ratings yet
- An Improved Brain Emotional Learning Algorithm For Accurate and Efficient Data AnalysisDocument15 pagesAn Improved Brain Emotional Learning Algorithm For Accurate and Efficient Data AnalysisMina MohammadiNo ratings yet
- Forney 2011Document7 pagesForney 2011Carol JosephNo ratings yet
- An Attention-Based Deep Learning Approach For Sleep Stage Classification With Single-Channel EEGDocument10 pagesAn Attention-Based Deep Learning Approach For Sleep Stage Classification With Single-Channel EEGNguyễn Trí ThanhNo ratings yet
- Gcns-Net: A Graph Convolutional Neural Network Approach For Decoding Time-Resolved Eeg Motor Imagery SignalsDocument11 pagesGcns-Net: A Graph Convolutional Neural Network Approach For Decoding Time-Resolved Eeg Motor Imagery SignalsHadj Abdelkader BENGHENIANo ratings yet
- Fnsys 14 615129Document15 pagesFnsys 14 615129Alex AssisNo ratings yet
- Ghosh 2019Document18 pagesGhosh 2019caxix70663No ratings yet
- Nihms 304338Document16 pagesNihms 304338Darren JonesNo ratings yet
- 2022 - Pseudo-Online Detection and Classification For Upper-Limb MovementsDocument13 pages2022 - Pseudo-Online Detection and Classification For Upper-Limb MovementsLucas da SilvaNo ratings yet
- Evaluation of Consumer Grade EEG Headsets For BCI PDFDocument6 pagesEvaluation of Consumer Grade EEG Headsets For BCI PDFAvionicsNo ratings yet
- Numerical Study of The Speed's Response of The Various Intelligent Models Using The Tansig, Logsig and Purelin Activation Functions in Different Layers of Artificial Neural NetworkDocument7 pagesNumerical Study of The Speed's Response of The Various Intelligent Models Using The Tansig, Logsig and Purelin Activation Functions in Different Layers of Artificial Neural NetworkIAES IJAINo ratings yet
- Machine Learning Capabilities of A Simulated Cerebellum: Matthew Hausknecht, Wen-Ke Li, Michael Mauk, and Peter StoneDocument14 pagesMachine Learning Capabilities of A Simulated Cerebellum: Matthew Hausknecht, Wen-Ke Li, Michael Mauk, and Peter StonerayestmNo ratings yet
- Non Invasivebrain ComputerinterfaceforprostheticlimbscontrolinmilitaryDocument14 pagesNon Invasivebrain ComputerinterfaceforprostheticlimbscontrolinmilitaryHayder AdnanNo ratings yet
- Bilateral Adaptation and Neurofeedback For Brain Computer Interface SystemDocument7 pagesBilateral Adaptation and Neurofeedback For Brain Computer Interface SystemjudithNo ratings yet
- 2207.13583-TOWARDS THE NEUROEVOLUTION OF LOW-LEVEL ARTIFICIAL General IntelligenceDocument18 pages2207.13583-TOWARDS THE NEUROEVOLUTION OF LOW-LEVEL ARTIFICIAL General IntelligenceFrancisco Herrera TrigueroNo ratings yet
- How Does The Brain Organize Information?Document16 pagesHow Does The Brain Organize Information?Fausto Intilla100% (1)
- Soft Computing: Project ReportDocument54 pagesSoft Computing: Project ReportShūbhåm ÑagayaÇhNo ratings yet
- The Prefrontal Cortex - Miller, E.K.Document7 pagesThe Prefrontal Cortex - Miller, E.K.jealonsofNo ratings yet
- Entropy - EEG2 Pages 1Document2 pagesEntropy - EEG2 Pages 1hemavathi114071No ratings yet
- The Artificial Intelligence Approach For PDFDocument43 pagesThe Artificial Intelligence Approach For PDFGt VaradharajanNo ratings yet
- A Method For Closed-Loop Presentation of Sensory Stimuli Conditional On The Internal Brain-State of Awake AnimalsDocument17 pagesA Method For Closed-Loop Presentation of Sensory Stimuli Conditional On The Internal Brain-State of Awake AnimalsatewogboNo ratings yet
- Recognition of Manipulated Objects by Motor Learning With Modular Architecture NetworksDocument13 pagesRecognition of Manipulated Objects by Motor Learning With Modular Architecture NetworksJúnior SouzaNo ratings yet
- Darpa Baa 09 27 Repair Final 4-22-09Document36 pagesDarpa Baa 09 27 Repair Final 4-22-09Mordin KatNo ratings yet
- Blankertz 2007Document12 pagesBlankertz 2007Ngọc NguyễnNo ratings yet
- Selvers TonDocument38 pagesSelvers TonBhavesh TailorNo ratings yet
- What Is An Artificial Neural Network?Document11 pagesWhat Is An Artificial Neural Network?Lakshmi GanapathyNo ratings yet
- Large-Scale Projects To Build Artificial Brains: AbaccusDocument20 pagesLarge-Scale Projects To Build Artificial Brains: AbaccusYellankiNo ratings yet
- OpTorch Optimized Deep Learning Architectures ForDocument7 pagesOpTorch Optimized Deep Learning Architectures ForFree SyncNo ratings yet
- Continual Task Learning in Natural and Artificial AgentsDocument12 pagesContinual Task Learning in Natural and Artificial AgentsChristo ChristovNo ratings yet
- Neuroimage: A. Zhigalov, E. Heinil A, T. Parviainen, L. Parkkonen, A. Hyv ArinenDocument10 pagesNeuroimage: A. Zhigalov, E. Heinil A, T. Parviainen, L. Parkkonen, A. Hyv ArinenCassia LmtNo ratings yet
- Analysis of Parameters Variations in Brain Emotional Learning ControllerDocument6 pagesAnalysis of Parameters Variations in Brain Emotional Learning Controllerbogewot67No ratings yet
- 4500 Reading SkillacquisitionDocument14 pages4500 Reading SkillacquisitionÁdám GusztafikNo ratings yet
- Understanding The Brain PDFDocument7 pagesUnderstanding The Brain PDFRuxandra Laura VladNo ratings yet
- Schyns 2008Document7 pagesSchyns 2008VALENTINA RIVERANo ratings yet
- Inferring The Function Performed by A Recurrent Neural NetworkDocument12 pagesInferring The Function Performed by A Recurrent Neural NetworkwashereNo ratings yet
- Reinforcement Learning in A Spiking Neural Model of Striatu - 2023 - NeurocomputDocument11 pagesReinforcement Learning in A Spiking Neural Model of Striatu - 2023 - NeurocomputSumeet MitraNo ratings yet
- Imp REVIWDocument42 pagesImp REVIWAhmad SherazNo ratings yet
- Week8 9 AnnDocument41 pagesWeek8 9 AnnBaskoroNo ratings yet
- A Study of EEG Based MI BCI For Imaginary Vowels and WordsDocument4 pagesA Study of EEG Based MI BCI For Imaginary Vowels and WordsEditor IJTSRDNo ratings yet
- Chapter 8 Study GuideDocument3 pagesChapter 8 Study Guideapi-242113360No ratings yet
- Xóa 24Document4 pagesXóa 24Rin TohsakaNo ratings yet
- Xóa 11Document28 pagesXóa 11Rin TohsakaNo ratings yet
- Xóa 6Document22 pagesXóa 6Rin TohsakaNo ratings yet
- Xóa 16Document29 pagesXóa 16Rin TohsakaNo ratings yet
- Xóa 18Document21 pagesXóa 18Rin TohsakaNo ratings yet
- Xóa 9Document18 pagesXóa 9Rin TohsakaNo ratings yet
- dòng chảy ricciDocument97 pagesdòng chảy ricciRin TohsakaNo ratings yet
- FFA11629667 pgn4Document2 pagesFFA11629667 pgn4Rin TohsakaNo ratings yet
- What Is Psychology and What Does It Involve?Document15 pagesWhat Is Psychology and What Does It Involve?Roxan PacsayNo ratings yet
- Reading With The Right BrainDocument189 pagesReading With The Right BrainLimb of izar100% (4)
- Private TutorialDocument11 pagesPrivate TutorialHoàngQuýPhi0% (1)
- Assessment of Abnormal Behaviour: Lindsay Ayearst, PH.DDocument32 pagesAssessment of Abnormal Behaviour: Lindsay Ayearst, PH.DMagishaa ThiyagarajahNo ratings yet
- Aesthetic Science - Connecting Minds, Brains, and ExperienceDocument26 pagesAesthetic Science - Connecting Minds, Brains, and Experiencediegomfagundes100% (1)
- Your Anxious BrainDocument45 pagesYour Anxious BrainAnksioznost Depresija100% (4)
- TBI Lecture HSU - Andre Newcome 2018Document102 pagesTBI Lecture HSU - Andre Newcome 2018Aaron James GrayNo ratings yet
- ERQ Reconstructive MemoryDocument3 pagesERQ Reconstructive Memorytamara mehdiNo ratings yet
- DiencephalonDocument24 pagesDiencephalonHostiuc Alex RaulNo ratings yet
- Lesson 5 - The Powers of The MindDocument4 pagesLesson 5 - The Powers of The MindCin DyNo ratings yet
- (Adolphs) Recognizing Emotion From Facial Exprressions - Psychological and Neurological MechanismsDocument43 pages(Adolphs) Recognizing Emotion From Facial Exprressions - Psychological and Neurological MechanismsPriss SaezNo ratings yet
- Neuromuscular Junction: Shannon Sanders Bishop O'ConnellDocument16 pagesNeuromuscular Junction: Shannon Sanders Bishop O'ConnellShannon SandersNo ratings yet
- Contouring Guidelines-HippocampusDocument33 pagesContouring Guidelines-HippocampusJuan RivasNo ratings yet
- Neurodegenerative DiseasesDocument2 pagesNeurodegenerative DiseasesBerniceTanNo ratings yet
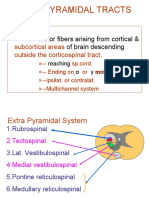
- Extrapyramidal Tracts: Motor Fibers Arising From Cortical & of Brain DescendingDocument21 pagesExtrapyramidal Tracts: Motor Fibers Arising From Cortical & of Brain DescendingAsfoor gake1No ratings yet
- Case Based Discussion 2-Adjustment Disorder Year 5 Rotation 5Document26 pagesCase Based Discussion 2-Adjustment Disorder Year 5 Rotation 5Priya GKNo ratings yet
- IQmatrix Guide For BeginnersDocument33 pagesIQmatrix Guide For BeginnersGerman CastroNo ratings yet
- The Rewards of Good Behavior - MAW 29th June - Sanjoy BhattacharyyaDocument25 pagesThe Rewards of Good Behavior - MAW 29th June - Sanjoy BhattacharyyaSAMCO ResearchNo ratings yet
- Chapter 4 Physical Development in InfancyDocument41 pagesChapter 4 Physical Development in InfancyLikith Kumar LikithNo ratings yet
- On - The - Soul - Ed FredkinDocument31 pagesOn - The - Soul - Ed FredkinDJSeidelNo ratings yet
- Alan March - Meeting The Resilience ChallengeDocument10 pagesAlan March - Meeting The Resilience ChallengeJorge LeónNo ratings yet
- History of DyslexiaDocument14 pagesHistory of Dyslexiateacher sabirNo ratings yet
- Coglab Experiment ImageryDocument4 pagesCoglab Experiment Imageryhetal mashruNo ratings yet
- Reading Your Amazing BrainDocument2 pagesReading Your Amazing Brainkirill1017No ratings yet
- Attention and ConsciousnessDocument53 pagesAttention and ConsciousnessRose100% (1)
- Soal MCQ Blok 16Document14 pagesSoal MCQ Blok 16Mira Pandora100% (1)
- Laboratory Introduction: Tohoku University Graduate School of MedicineDocument219 pagesLaboratory Introduction: Tohoku University Graduate School of MedicinecartamenesNo ratings yet
- Resting State Israel 2019 Étude TypiqueDocument6 pagesResting State Israel 2019 Étude Typiqueouazzani youssefNo ratings yet
- Brainvoyager Braintutor Exercises - v2Document8 pagesBrainvoyager Braintutor Exercises - v2Alda Van Den EngelNo ratings yet
- AETIOLOGY OF MENTAL ILLNESS - PPT - DLNJDocument19 pagesAETIOLOGY OF MENTAL ILLNESS - PPT - DLNJTamie MagalasiNo ratings yet
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionFrom EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionRating: 5 out of 5 stars5/5 (2)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- A Brief History of Artificial Intelligence: What It Is, Where We Are, and Where We Are GoingFrom EverandA Brief History of Artificial Intelligence: What It Is, Where We Are, and Where We Are GoingRating: 4.5 out of 5 stars4.5/5 (3)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerFrom EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerRating: 4 out of 5 stars4/5 (4)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsFrom EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNo ratings yet
- Hands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesFrom EverandHands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesNo ratings yet
- System Design Interview: 300 Questions And Answers: Prepare And PassFrom EverandSystem Design Interview: 300 Questions And Answers: Prepare And PassNo ratings yet
- Architects of Intelligence: The truth about AI from the people building itFrom EverandArchitects of Intelligence: The truth about AI from the people building itRating: 4.5 out of 5 stars4.5/5 (21)