You might also like
- Bece Junior WAEC Past Question - English Language (Updated)Document23 pagesBece Junior WAEC Past Question - English Language (Updated)Kitan100% (2)
- Analisa Struktur Sebelum UAS - WJSDocument6 pagesAnalisa Struktur Sebelum UAS - WJSYukhriNo ratings yet
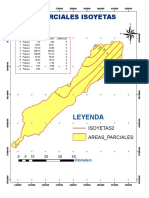
- Areas Parciales Isoyetas: LeyendaDocument1 pageAreas Parciales Isoyetas: LeyendaCarlos Paitan BenitoNo ratings yet
- Areas Isoyeta01 PDFDocument1 pageAreas Isoyeta01 PDFCarlos Paitan BenitoNo ratings yet
- Practica 1Document59 pagesPractica 1Mayeli ParaviciniNo ratings yet
- Hot Rolled Steel Section Sets: No Data To Print ..Document2 pagesHot Rolled Steel Section Sets: No Data To Print ..9082888lcNo ratings yet
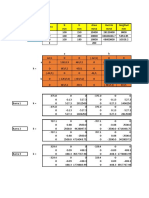
- α barra b h Area Inercia longitud mm mm mm2 mm4 mmDocument3 pagesα barra b h Area Inercia longitud mm mm mm2 mm4 mmornan floresNo ratings yet
- Problem Description: Material PropertiesDocument9 pagesProblem Description: Material PropertiesAbhishekNo ratings yet
- Beam DesignDocument29 pagesBeam DesignMwengei MutetiNo ratings yet
- Matrix - Beta ProgramDocument8 pagesMatrix - Beta ProgramNevie ClockworkNo ratings yet
- Solar Panels Support Calculation: 400 O/D 700 O/DDocument6 pagesSolar Panels Support Calculation: 400 O/D 700 O/DmidoNo ratings yet
- TAREA6,MODELADODocument8 pagesTAREA6,MODELADONepo LooNo ratings yet
- Problem 1 Production Batch SchedulingDocument5 pagesProblem 1 Production Batch SchedulingCarlos Juan SarmientNo ratings yet
- Ejercicios de ClaseDocument6 pagesEjercicios de ClaseCarlos Guevara SánchezNo ratings yet
- Code Number Diagram: Solution To Question 1Document18 pagesCode Number Diagram: Solution To Question 1Matthew CHANNo ratings yet
- MBA SEM I Home Assignments - MS-ExcelDocument5 pagesMBA SEM I Home Assignments - MS-ExcelJay OswalNo ratings yet
- Game BalancingDocument5 pagesGame Balancingiphone itiwNo ratings yet
- Class 1st Axle 2nd Axle Sum LEF Product Class 1st Axle Tandem Axle Lef Sa Lef Ta Sum of Product "1-1" "1-2"Document2 pagesClass 1st Axle 2nd Axle Sum LEF Product Class 1st Axle Tandem Axle Lef Sa Lef Ta Sum of Product "1-1" "1-2"Mathew NaralNo ratings yet
- Barra B H Area Inercia Longitud MM MM mm2 mm4 MMDocument6 pagesBarra B H Area Inercia Longitud MM MM mm2 mm4 MMAddel Yupanqui MirandaNo ratings yet
- Earthquake Analysis According To BNBC 2020Document42 pagesEarthquake Analysis According To BNBC 2020SayeedNo ratings yet
- Winding Piece Work May 2017Document4 pagesWinding Piece Work May 2017MohammedAhmadOsamaNo ratings yet
- Section Properties CalculatorDocument3 pagesSection Properties CalculatorgenergiaNo ratings yet
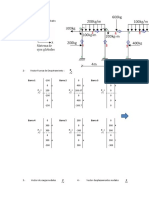
- Grados Libertad: Cursos Analisis Estrutural Elementos: Ing Nestor Cardenas Sanchez EDocument59 pagesGrados Libertad: Cursos Analisis Estrutural Elementos: Ing Nestor Cardenas Sanchez EIvan Trevejo QuintoNo ratings yet
- Analysis of beam structure and calculation of stiffness matrixDocument42 pagesAnalysis of beam structure and calculation of stiffness matrixLídia EldianaNo ratings yet
- No 4 FixxDocument19 pagesNo 4 Fixxbalad7998No ratings yet
- CE512 July 9Document17 pagesCE512 July 9Noel Baldonado Jr.No ratings yet
- Scale of Finance Bahraich FY 21-22Document2 pagesScale of Finance Bahraich FY 21-22ashu mNo ratings yet
- Tarea 07-Reyes Rosas AderDocument125 pagesTarea 07-Reyes Rosas AderJorgeSTNo ratings yet
- Chart analysis of structural propertiesDocument22 pagesChart analysis of structural propertiesadriana correaNo ratings yet
- Analisis MatricialDocument42 pagesAnalisis MatricialAlex RojasNo ratings yet
- Caso 6Document646 pagesCaso 6aj.186592No ratings yet
- Toilet Exhaust SystemDocument3 pagesToilet Exhaust SystemVinay PantNo ratings yet
- All in OneDocument26 pagesAll in OneRamandaNo ratings yet
- 100 Draws From Continuous Uniform U (0,1)Document27 pages100 Draws From Continuous Uniform U (0,1)Naresh KumarNo ratings yet
- Solution ManualDocument17 pagesSolution ManualputelNo ratings yet
- Excel MatricialDocument27 pagesExcel MatricialAndhy R Candiotti QuNo ratings yet
- LabofinitosDocument4 pagesLabofinitosSergio Fernandez quispeNo ratings yet
- Dokumen - Tips - Excel para Analisis MatricialDocument7 pagesDokumen - Tips - Excel para Analisis MatricialDiana Valdivia QuelopanaNo ratings yet
- Kriging Analysis and VisualizationDocument19 pagesKriging Analysis and VisualizationcptnastroNo ratings yet
- Space Engineers Ship CalculatorDocument7 pagesSpace Engineers Ship Calculatorblackwolfz555No ratings yet
- Gain & Loss EQUITY Report September FNR352D101Document1 pageGain & Loss EQUITY Report September FNR352D101PALLAVI SHARMANo ratings yet
- 100 F (X) 0.0357947368x - 41.2473684211 R 0.981835685: Konsentrasi MG/LDocument10 pages100 F (X) 0.0357947368x - 41.2473684211 R 0.981835685: Konsentrasi MG/LSari MasyithahNo ratings yet
- EOQ Inventory Model with Price BreaksDocument2 pagesEOQ Inventory Model with Price BreaksSakshiNo ratings yet
- Matricial CerchaDocument52 pagesMatricial CerchaDaniel RuizNo ratings yet
- Preference Shares - September 6 2019Document1 pagePreference Shares - September 6 2019Anonymous ZXo7Xf4No ratings yet
- Production Parts Press Line Coverage ReportDocument34 pagesProduction Parts Press Line Coverage ReportAjayNo ratings yet
- Max Z OptimizationDocument9 pagesMax Z OptimizationErnestoJUA11No ratings yet
- Laboratory CBR Test (SNI 03 - 1744 - 1989) : Tested byDocument2 pagesLaboratory CBR Test (SNI 03 - 1744 - 1989) : Tested byMrdNo ratings yet
- ExamenUltimoParcial TiconaVino R1687-XDocument15 pagesExamenUltimoParcial TiconaVino R1687-XdiversidadcristianprimeNo ratings yet
- 1 - Stock List in NantongDocument7 pages1 - Stock List in NantongOgnjen KovacevicNo ratings yet
- Beam Structure Stiffness Matrix CalculationDocument6 pagesBeam Structure Stiffness Matrix CalculationasluznetNo ratings yet
- Lab 05Document8 pagesLab 05Ernesto ZavaletaNo ratings yet
- Engr. Mark Christian D. Esguerra 8-Sep-21: Member 1Document4 pagesEngr. Mark Christian D. Esguerra 8-Sep-21: Member 1MARKCHRISTMASNo ratings yet
- Mesh Sizing Chart For StrainersDocument2 pagesMesh Sizing Chart For StrainersSanket SavlaNo ratings yet
- Adsorban Konsentrasi Vs Adsorban: Axis TitleDocument2 pagesAdsorban Konsentrasi Vs Adsorban: Axis TitleTiommy Wizimmy PratiwiNo ratings yet
- Nozzle Load TableDocument14 pagesNozzle Load TableHossein FarhadiNo ratings yet
- Assemble global stiffness equation beamDocument1 pageAssemble global stiffness equation beamEdchelyn BornforThis MayugaNo ratings yet
- Chart Title: 0.9 1 F (X) 0.15076x + 0.3044 R 0.6336971755Document4 pagesChart Title: 0.9 1 F (X) 0.15076x + 0.3044 R 0.6336971755alfin vandeniNo ratings yet
- Assignment SumDocument6 pagesAssignment SumAbirami SivakumarNo ratings yet
- Government Publications: Key PapersFrom EverandGovernment Publications: Key PapersBernard M. FryNo ratings yet
- Avrami 1939 Kinetics of Phase Change. I General TheoryDocument11 pagesAvrami 1939 Kinetics of Phase Change. I General TheoryrobertNo ratings yet
- Baumholser2014-2015 ItsLaidOutintheCardsDocument51 pagesBaumholser2014-2015 ItsLaidOutintheCardsnikitaNo ratings yet
- Properties and Reactions of Acids and BasesDocument46 pagesProperties and Reactions of Acids and Basesaliefyan4769No ratings yet
- Interpreting SNT TC 1A PDF 2Document1 pageInterpreting SNT TC 1A PDF 2Jagannath SahuNo ratings yet
- đề 20Document5 pagesđề 20duongnguyenthithuy2008No ratings yet
- AI Unit 1 PDFDocument51 pagesAI Unit 1 PDFAshishNo ratings yet
- Social EntrepreneurshipDocument21 pagesSocial EntrepreneurshipSree LakshyaNo ratings yet
- Literacy Day in IndiaDocument10 pagesLiteracy Day in IndiaThe United IndianNo ratings yet
- Grow Your Mindset CHDocument4 pagesGrow Your Mindset CHapi-468161460No ratings yet
- Jul Dec 2021 SK HRH Crec v8 2Document2,264 pagesJul Dec 2021 SK HRH Crec v8 2San DeeNo ratings yet
- BiographyDocument3 pagesBiographyPatricia Anne Nicole CuaresmaNo ratings yet
- PK Mitomycin C in LCMSDocument13 pagesPK Mitomycin C in LCMSRuthNo ratings yet
- Din 2215 2Document7 pagesDin 2215 2Dule JovanovicNo ratings yet
- Apollo / Saturn V: Insert Disk Q and The Fold OverDocument4 pagesApollo / Saturn V: Insert Disk Q and The Fold OverRob ClarkNo ratings yet
- Budget of Work English 7: Quarter Competencies No. of Sessions First QuarterDocument3 pagesBudget of Work English 7: Quarter Competencies No. of Sessions First QuarterEllane Jean DeniegaNo ratings yet
- Ilham Shalabi, Imam Muhammad Bin Saud Islamic UniversityDocument20 pagesIlham Shalabi, Imam Muhammad Bin Saud Islamic Universityaron victoryNo ratings yet
- Math6 q1 Mod5 AdditionofDecimals v4-SIGNEDDocument34 pagesMath6 q1 Mod5 AdditionofDecimals v4-SIGNEDARRIANE JOY TOLEDONo ratings yet
- Phrasal Verbs ListDocument85 pagesPhrasal Verbs ListVirginia E. C.No ratings yet
- Niacl Ao Prelims 2016Document18 pagesNiacl Ao Prelims 2016sabarinathNo ratings yet
- CHEMICAL APPROVAL FORMDocument2 pagesCHEMICAL APPROVAL FORMYosep SasadaNo ratings yet
- PVT Behavior of Fluids: Dr. M. SubramanianDocument58 pagesPVT Behavior of Fluids: Dr. M. SubramanianRama GaurNo ratings yet
- Excellent Student Achieves High MarksDocument2 pagesExcellent Student Achieves High MarksKhalid MeitaniNo ratings yet
- 1.5 MM ss304 Material Test ReportDocument1 page1.5 MM ss304 Material Test ReportBalaji DefenceNo ratings yet
- MB Module 1Document29 pagesMB Module 1sophieNo ratings yet
- Lesson 10 Graphic OrganizersDocument22 pagesLesson 10 Graphic Organizersisabelcadagtan10No ratings yet
- Dosicard-R User's Manual (1) - FixedDocument67 pagesDosicard-R User's Manual (1) - Fixedbogdy0073No ratings yet
- Sow English Year 5 2021Document14 pagesSow English Year 5 2021AZRINA ZARIFAH BINTI ZAINAL MoeNo ratings yet
- Zhao Et Al 2012Document10 pagesZhao Et Al 2012Mohd Sofiyan Bin SulaimanNo ratings yet
- I. Trabelsi, K. Yoneyama, Z. Abbes, M. Amri, X. Xie, T. Kisugi, H.I. Kim, M. Kharrat, K. YoneyamaDocument8 pagesI. Trabelsi, K. Yoneyama, Z. Abbes, M. Amri, X. Xie, T. Kisugi, H.I. Kim, M. Kharrat, K. YoneyamaCleaver BrightNo ratings yet