You might also like
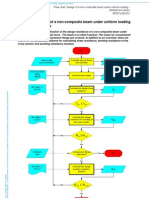
- EC3 Flow Chart Design of A Non-Composite Beam Under Uniform Loading - Detailed ProcedureDocument5 pagesEC3 Flow Chart Design of A Non-Composite Beam Under Uniform Loading - Detailed Procedurejskolmen100% (1)
- Theories of Mechanical FailureDocument7 pagesTheories of Mechanical FailureRajesh KhadkaNo ratings yet
- CompressDocument12 pagesCompressWataNo ratings yet
- Nagesh 2018Document11 pagesNagesh 2018Juan Pablo GMNo ratings yet
- Characterization of Hyperelastic Material by Experimental Tests and Curve FittingDocument10 pagesCharacterization of Hyperelastic Material by Experimental Tests and Curve Fittingpranav chougaleNo ratings yet
- Advances in nonlinear finite element programmingDocument17 pagesAdvances in nonlinear finite element programmingManoj BaralNo ratings yet
- AES PaperDocument18 pagesAES PaperAlex BaykinNo ratings yet
- Spinning string fluid dynamics in general relativityDocument12 pagesSpinning string fluid dynamics in general relativityproj3892No ratings yet
- Coupled Thermo-Mechanical AnalysesDocument12 pagesCoupled Thermo-Mechanical AnalysesGustavo TeixeiraNo ratings yet
- Studies in anisotropic plasticity with Hill criterionDocument22 pagesStudies in anisotropic plasticity with Hill criterionngNo ratings yet
- ajme-1-7-4Document8 pagesajme-1-7-4qi wangNo ratings yet
- A Method For DeterminingDocument12 pagesA Method For DeterminingLeonardo JaimesNo ratings yet
- Mikhailov1994-Finite Difference Method by Using MathematicsDocument5 pagesMikhailov1994-Finite Difference Method by Using MathematicsRenato Santos de SouzaNo ratings yet
- H3E2 RatioDocument15 pagesH3E2 RatiollllNo ratings yet
- FQT2023 2Document5 pagesFQT2023 2muay88No ratings yet
- Brigadnov 2005Document14 pagesBrigadnov 2005Iván Amaury S DNo ratings yet
- Attenuation Properties of Viscoelastic Material: Pure and Applied Geophysics December 1989Document12 pagesAttenuation Properties of Viscoelastic Material: Pure and Applied Geophysics December 1989José Manuel Cortés CortésNo ratings yet
- Msci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsDocument7 pagesMsci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsRoy VeseyNo ratings yet
- The Power Normal DistributionDocument7 pagesThe Power Normal DistributionMuhammad SatriyoNo ratings yet
- Materiel ModellingDocument14 pagesMateriel ModellingGanesh KumarNo ratings yet
- Solving Singular Coupled Fractional Differential Equations With Integral Boundary Constraints by Coupled Fixed Point MethodologyDocument23 pagesSolving Singular Coupled Fractional Differential Equations With Integral Boundary Constraints by Coupled Fixed Point MethodologyBoutiara AbdellatifNo ratings yet
- F2D421Document124 pagesF2D421Narim SenouneNo ratings yet
- 09.2005 IJNME DiscUBDocument20 pages09.2005 IJNME DiscUBkristian.krabbenhoft1463No ratings yet
- Journal of Number Theory: Shaoji Feng, Xiaosheng WuDocument13 pagesJournal of Number Theory: Shaoji Feng, Xiaosheng WuNikos MantzakourasNo ratings yet
- Creep, Relaxation and Viscosity PropertiesDocument28 pagesCreep, Relaxation and Viscosity PropertiesNAYIBE LISBETH CARDENAS LEGARDANo ratings yet
- P. Sollero and M. H. Aliabadi. 1993. Fracture Mechanics Analysis of Anisotropic Plates by The Boundary Element Method.Document16 pagesP. Sollero and M. H. Aliabadi. 1993. Fracture Mechanics Analysis of Anisotropic Plates by The Boundary Element Method.Leonardo BernardoNo ratings yet
- 1985 - (ReC85)Document12 pages1985 - (ReC85)Jorge LlimpeNo ratings yet
- On The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BatheDocument4 pagesOn The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BathecyrusnasiraiNo ratings yet
- Geometrical Properties of Cumulant ExpansionsDocument28 pagesGeometrical Properties of Cumulant Expansionstestonly261No ratings yet
- Received 30 September 1992Document7 pagesReceived 30 September 1992Hanna ChingNo ratings yet
- Homogenized porous rubber model differs from Blatz-Ko at high strainsDocument14 pagesHomogenized porous rubber model differs from Blatz-Ko at high strainsThamaraiNo ratings yet
- Modeling of Nevada Sand Behavior Using CHSOIL: February 2011Document9 pagesModeling of Nevada Sand Behavior Using CHSOIL: February 2011Zhenhe SongNo ratings yet
- Nuclear Rotations in The Rigid Rotor Model: ResearchDocument7 pagesNuclear Rotations in The Rigid Rotor Model: ResearchBerhanu MengistuNo ratings yet
- Flutter Symposium 2011Document7 pagesFlutter Symposium 2011gandalf500No ratings yet
- Gauge Field Theory of Folded ProteinsDocument6 pagesGauge Field Theory of Folded ProteinsJoon Suk HuhNo ratings yet
- Weighted Means and Weighting Functions: Kybernetika - Praha - January 2006Document12 pagesWeighted Means and Weighting Functions: Kybernetika - Praha - January 2006golden abidemNo ratings yet
- Beam PDFDocument11 pagesBeam PDFparth daxiniNo ratings yet
- ACME2016 ExtendedabstractDocument4 pagesACME2016 ExtendedabstractManuelNo ratings yet
- Timo ShinkoDocument13 pagesTimo ShinkoayantuNo ratings yet
- Constitutive Modeling of Elastomers - Accuracy of Predictions and Numerical EfficiencyDocument19 pagesConstitutive Modeling of Elastomers - Accuracy of Predictions and Numerical EfficiencyAdamDNo ratings yet
- APM_continuumDocument12 pagesAPM_continuumARUN KRISHNA B J am21d400No ratings yet
- The Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsDocument12 pagesThe Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsVelmurugan mNo ratings yet
- Curve Fitting For Ogden, Yeoh and Polynomial ModelsDocument18 pagesCurve Fitting For Ogden, Yeoh and Polynomial ModelsGustavoNo ratings yet
- Wilson Loops in Noncommutative Yang MillsDocument26 pagesWilson Loops in Noncommutative Yang MillsmlmilleratmitNo ratings yet
- J 6 Two-DimensionalanalysisofslenderstructuresusinghighorderboundaryelementsDocument23 pagesJ 6 Two-DimensionalanalysisofslenderstructuresusinghighorderboundaryelementsChristian LeobreraNo ratings yet
- An Algorithm for the Computation of EigenvaluesDocument44 pagesAn Algorithm for the Computation of Eigenvalues孔翔鸿No ratings yet
- Dynamical Volume Element in Scale-Invariant and Supergravity TheoriesDocument6 pagesDynamical Volume Element in Scale-Invariant and Supergravity TheoriesCroco AliNo ratings yet
- Estimation of Stiffness Characteristics of LRB BearingsDocument10 pagesEstimation of Stiffness Characteristics of LRB BearingsRiz LegaspiNo ratings yet
- Mo 2010Document9 pagesMo 2010ranim najibNo ratings yet
- Yield Criteria FormulationDocument26 pagesYield Criteria FormulationTCKE20No ratings yet
- Nguemalieu Kouetcha - PaperDocument9 pagesNguemalieu Kouetcha - PaperTheodoros NikitopoulosNo ratings yet
- Energy Principles and Finite Element Methods For PDocument15 pagesEnergy Principles and Finite Element Methods For Paarvee.armoorNo ratings yet
- 1 s2.0 S2211379723000876 MainDocument29 pages1 s2.0 S2211379723000876 MainSajjad AliNo ratings yet
- Jomms 08Document20 pagesJomms 08ebrahimpanNo ratings yet
- Optik: Original Research ArticleDocument14 pagesOptik: Original Research ArticleBaljinderNo ratings yet
- ICAMS 2014 – Off-axis mechanical properties of FRP compositesDocument6 pagesICAMS 2014 – Off-axis mechanical properties of FRP compositesSabin RautNo ratings yet
- Hyperplasticity Theory For Bangkok Clay Model: S. Likitlersuang & G. T. HoulsbyDocument6 pagesHyperplasticity Theory For Bangkok Clay Model: S. Likitlersuang & G. T. HoulsbyLTE002No ratings yet
- Materials Selection Methodology: Application For A Lightweight Bar On TensionDocument21 pagesMaterials Selection Methodology: Application For A Lightweight Bar On TensionIssac AguirreNo ratings yet
- ch8 ProbsDocument4 pagesch8 ProbsEkrem GüldesteNo ratings yet
- Bonfiglio ICA2007Document7 pagesBonfiglio ICA2007tanjalazarNo ratings yet
- The Importance of the Ising Model Revealed by Magnetic Susceptibility StudiesDocument27 pagesThe Importance of the Ising Model Revealed by Magnetic Susceptibility StudiesdepaulidNo ratings yet
- PDLAMMPS - made easy: An introductionDocument8 pagesPDLAMMPS - made easy: An introductionSaeed AbdNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- 1-s2.0-S0167663616301090-main (1)Document6 pages1-s2.0-S0167663616301090-main (1)Nam Huu TranNo ratings yet
- BF01134604Document8 pagesBF01134604Nam Huu TranNo ratings yet
- s00396-001-0624-5Document5 pagess00396-001-0624-5Nam Huu TranNo ratings yet
- s00419-020-01778-0Document18 pagess00419-020-01778-0Nam Huu TranNo ratings yet
- s11043-021-09486-0Document14 pagess11043-021-09486-0Nam Huu TranNo ratings yet
- An Hyper-Visco-Hysteretic Model For Elastomeric Behaviour Under Low and High Temperatures: Experimental and Numerical InvestigationsDocument7 pagesAn Hyper-Visco-Hysteretic Model For Elastomeric Behaviour Under Low and High Temperatures: Experimental and Numerical Investigationsandrea assanelliNo ratings yet
- (2007) A thermal degradation mechanism of polyvinyl alcoholsilica nanocompositesDocument11 pages(2007) A thermal degradation mechanism of polyvinyl alcoholsilica nanocompositesNam Huu TranNo ratings yet
- RoutledgeHandbooks-9781315268057-chapter3Document55 pagesRoutledgeHandbooks-9781315268057-chapter3Nam Huu TranNo ratings yet
- fluids-06-00418-v2Document18 pagesfluids-06-00418-v2Nam Huu TranNo ratings yet
- Evaluation_of_the_Methods_for_Estimating_the_FullyDocument11 pagesEvaluation_of_the_Methods_for_Estimating_the_FullyNam Huu TranNo ratings yet
- 1-s2.0-S0167663616301090-main (1)Document6 pages1-s2.0-S0167663616301090-main (1)Nam Huu TranNo ratings yet
- (2021, Dong) 3D Printing of Inherently Nanoporous Polymers via Polymerization-Induced Phase SeparationDocument12 pages(2021, Dong) 3D Printing of Inherently Nanoporous Polymers via Polymerization-Induced Phase SeparationNam Huu TranNo ratings yet
- SE-3-1-47Document12 pagesSE-3-1-47Nam Huu TranNo ratings yet
- Jasim2018 PDFDocument10 pagesJasim2018 PDFVedhas WalimbeNo ratings yet
- (2022, Mateos) Hybrid magnetorheological elastomers enable versatile soft actuatorsDocument14 pages(2022, Mateos) Hybrid magnetorheological elastomers enable versatile soft actuatorsNam Huu TranNo ratings yet
- (2015, Dimitri) Multimaterial magnetically assisted 3D printing of composite materialsDocument10 pages(2015, Dimitri) Multimaterial magnetically assisted 3D printing of composite materialsNam Huu TranNo ratings yet
- Magneto-Mechanical Characterization of Magnetorheological ElastomersDocument10 pagesMagneto-Mechanical Characterization of Magnetorheological ElastomersNam Huu TranNo ratings yet
- (2020, Bien-Aime) Characterization of Hyperelastic Deformation Behavior of Rubber-Like MaterialsDocument10 pages(2020, Bien-Aime) Characterization of Hyperelastic Deformation Behavior of Rubber-Like MaterialsNam Huu TranNo ratings yet
- Two Dimensional and 3D LoadingDocument20 pagesTwo Dimensional and 3D LoadingJanith100% (1)
- ABAQUS Homework #3 HintsDocument14 pagesABAQUS Homework #3 HintsAndres CarphioNo ratings yet
- Development of New Hydroforming MethodsDocument8 pagesDevelopment of New Hydroforming MethodsAli Tavakoli NiaNo ratings yet
- Nani Babu-High-Temperature Fatigue Crack Growth Behaviour of SS 316LN PDFDocument10 pagesNani Babu-High-Temperature Fatigue Crack Growth Behaviour of SS 316LN PDFAvinash ChittellaNo ratings yet
- 221 Lab 1 - Tensile Testing of Metals (2017W)Document8 pages221 Lab 1 - Tensile Testing of Metals (2017W)Abdul HafieNo ratings yet
- Viscoelasticity Notes - WashingtonDocument4 pagesViscoelasticity Notes - WashingtonJimmy ThomasNo ratings yet
- 33 - India - Connecting Rod AnalisysDocument7 pages33 - India - Connecting Rod AnalisysBima SorayaNo ratings yet
- Buckling and Vibration of Laminated Composite Plates Using Various Plate TheoriesDocument10 pagesBuckling and Vibration of Laminated Composite Plates Using Various Plate TheoriesahoramehriNo ratings yet
- Effectiveness of Geomembrane Liners in Minimizing Seepage in Tailings Storage FacilitiesDocument14 pagesEffectiveness of Geomembrane Liners in Minimizing Seepage in Tailings Storage FacilitiesJavierNo ratings yet
- Ap1 Lab Phet Hookes LawDocument5 pagesAp1 Lab Phet Hookes LawDaniel AmmarNo ratings yet
- Lab Report#4Document15 pagesLab Report#4brayanNo ratings yet
- A Mathematical Model For Calculating Cross-Sectional Properties of Modern Wind Turbine Composite BladesDocument10 pagesA Mathematical Model For Calculating Cross-Sectional Properties of Modern Wind Turbine Composite BladesMAGRINo ratings yet
- Experimental Study of Rigid Beam-To-Box Column Connections With Types of Internal/external StiffenersDocument16 pagesExperimental Study of Rigid Beam-To-Box Column Connections With Types of Internal/external StiffenersJairo MasaNo ratings yet
- 10.1.1.659.8414 Elbow31 Vs Elbow32, Modes, Shell EtcDocument13 pages10.1.1.659.8414 Elbow31 Vs Elbow32, Modes, Shell EtcCurtis PattersonNo ratings yet
- Introduction To Triaxial Testing - Part 2Document5 pagesIntroduction To Triaxial Testing - Part 2Peteris Skels100% (1)
- AISC (ASD) Shear Connection - Cleat AngleDocument15 pagesAISC (ASD) Shear Connection - Cleat AngleMANOJNo ratings yet
- Geotechnical GEO5 Fem enDocument2 pagesGeotechnical GEO5 Fem encesmanroe231No ratings yet
- Investigating The Effect of Printing Speed and Mode Mixity On The Fracture Behavior of FDM-ABS SpecimensDocument13 pagesInvestigating The Effect of Printing Speed and Mode Mixity On The Fracture Behavior of FDM-ABS SpecimensAndre AbdullahNo ratings yet
- A Novel and Simple Technique For Development of Dual Phase Steels WithDocument6 pagesA Novel and Simple Technique For Development of Dual Phase Steels WithDaniel Carlos AndradeNo ratings yet
- FEM 5node 5memDocument7 pagesFEM 5node 5memmintu PatelNo ratings yet
- Cornu Method XXDocument7 pagesCornu Method XXArunnarenNo ratings yet
- Young's Modulus:: Y Strain StressDocument3 pagesYoung's Modulus:: Y Strain StressYosif AlanesiNo ratings yet
- CH 06Document54 pagesCH 06RODRIGO JAVIER BRIZUELA PADILLANo ratings yet
- FEM Modelling of Elastomeric BearingDocument8 pagesFEM Modelling of Elastomeric BearingGeEs AnggaNo ratings yet
- Flexural or Bending Test Lab ReportDocument9 pagesFlexural or Bending Test Lab ReportAman NigamNo ratings yet