You might also like
- Lab # 04 (Data Structure and Algorithm)Document5 pagesLab # 04 (Data Structure and Algorithm)lucasNo ratings yet
- Mubeena Rajini C++Document120 pagesMubeena Rajini C++RajiniNo ratings yet
- Data structures and algorithms guideDocument20 pagesData structures and algorithms guidegauravujjawalNo ratings yet
- ADVANCED DATA STRUCTURES FOR ALGORITHMS: Mastering Complex Data Structures for Algorithmic Problem-Solving (2024)From EverandADVANCED DATA STRUCTURES FOR ALGORITHMS: Mastering Complex Data Structures for Algorithmic Problem-Solving (2024)No ratings yet
- Sample Linked Lists Chapter (Data Structure and Algorithmic Thinking With Python)Document47 pagesSample Linked Lists Chapter (Data Structure and Algorithmic Thinking With Python)Karthikeyan BalasubramaniamNo ratings yet
- Linked ListsDocument1 pageLinked ListsBhuwan Prasad UpadhyayNo ratings yet
- Data Structures 8.1 Introduction To Data StructuresDocument51 pagesData Structures 8.1 Introduction To Data StructuresshabbeersksNo ratings yet
- Data StructuresDocument8 pagesData StructuresDeepak BankaNo ratings yet
- Assignment 02Document11 pagesAssignment 02kk1887857No ratings yet
- Unit-Iii: Linked Lists: Free (PTR)Document32 pagesUnit-Iii: Linked Lists: Free (PTR)satishNo ratings yet
- 1.3 Linked ListDocument72 pages1.3 Linked ListSamrat SamratNo ratings yet
- UNIT-I DS NotesDocument62 pagesUNIT-I DS NotesBandi SirishaNo ratings yet
- Lecture 5 Linked Lists in C++Document40 pagesLecture 5 Linked Lists in C++Simple lyrics100% (1)
- DSA RTU 2022 PaperDocument15 pagesDSA RTU 2022 PaperAmaan KhokarNo ratings yet
- Array Vs Linked ListDocument26 pagesArray Vs Linked Listbenzema nunu100% (1)
- Lab Report 5 DsDocument9 pagesLab Report 5 DscmtajuddinchowdhuryNo ratings yet
- Linked ListDocument58 pagesLinked Listkunal.bhoi.stNo ratings yet
- Dsa NotesDocument45 pagesDsa Notesparthpathak2604No ratings yet
- Chapter 4 ALGODocument11 pagesChapter 4 ALGOethiopia1212 ethoNo ratings yet
- Array and Linked ListDocument36 pagesArray and Linked ListHenschell CorolloNo ratings yet
- DSA Lab 8Document13 pagesDSA Lab 8uaengineering ManzoorNo ratings yet
- 3 Linked ListsDocument64 pages3 Linked ListsSateesh Bonthala0% (1)
- Lecture 4 - Link List - Rules and List ImplementationDocument21 pagesLecture 4 - Link List - Rules and List ImplementationROBLEDO John RonnelNo ratings yet
- ds mod 3Document29 pagesds mod 3afnanazrin123No ratings yet
- 4.linked ListDocument68 pages4.linked ListLakruwan KasunNo ratings yet
- Introduction to Linked Lists - Dynamic Data StructureDocument4 pagesIntroduction to Linked Lists - Dynamic Data StructureBilla MavishnuNo ratings yet
- DS ImportentDocument17 pagesDS Importentgoswamiakshay777No ratings yet
- Mahedi 1.1 1.2Document7 pagesMahedi 1.1 1.2Mahedi HassanNo ratings yet
- Data Structure and Algorithum LAB 02Document8 pagesData Structure and Algorithum LAB 02earn moneyNo ratings yet
- Basics of Linked List in 40 CharactersDocument12 pagesBasics of Linked List in 40 CharactersSourabh YadavNo ratings yet
- Dsa AnswersDocument22 pagesDsa AnswersanmolNo ratings yet
- Single Lin ListDocument35 pagesSingle Lin ListSumant ReddyNo ratings yet
- Data Structures: Lec3: Single Linked ListDocument17 pagesData Structures: Lec3: Single Linked ListAmro AbosaifNo ratings yet
- Term Paper On Linked ListDocument8 pagesTerm Paper On Linked Listc5r3aep1100% (1)
- Data Structure Interview C Program: Questions To Create A Copy of A Linked ListDocument11 pagesData Structure Interview C Program: Questions To Create A Copy of A Linked ListschintapNo ratings yet
- An Array and Linked List Data Structures ExplainedDocument10 pagesAn Array and Linked List Data Structures ExplainedMuzammal AnsariNo ratings yet
- Dsa-Unit 2Document85 pagesDsa-Unit 2cocayushwar30No ratings yet
- Lab3 - Linked List - SolutionDocument10 pagesLab3 - Linked List - Solutiondemro channelNo ratings yet
- List Adt: 1. What Is A Data Structure?Document7 pagesList Adt: 1. What Is A Data Structure?nandanNo ratings yet
- Lab Linked ListDocument7 pagesLab Linked ListSuhaib AwanNo ratings yet
- Introduction, Single Linked List, Circular Linked List, Doubly Linked List, Multiply Linked List, ApplicationsDocument58 pagesIntroduction, Single Linked List, Circular Linked List, Doubly Linked List, Multiply Linked List, ApplicationsG.ChinmayiNo ratings yet
- Chapter 2 Arrays Iteration InvariantsDocument19 pagesChapter 2 Arrays Iteration InvariantsJohn Marc AlvarezNo ratings yet
- Chapter 3Document69 pagesChapter 3Abenezer AbrhamNo ratings yet
- DS Ex 6Document7 pagesDS Ex 6animationmake14No ratings yet
- PPT Lecture 2.2.1 (3)Document18 pagesPPT Lecture 2.2.1 (3)deadlygamer6996No ratings yet
- Chap-1 Linked ListsDocument28 pagesChap-1 Linked ListsCHENGAMMA CHITTETINo ratings yet
- Chapter 3 - Linked ListsDocument49 pagesChapter 3 - Linked ListsIan MoloNo ratings yet
- Dictionaries: Advanced Data Structures 1Document138 pagesDictionaries: Advanced Data Structures 1Kalyan MajjiNo ratings yet
- Linked List Project ReportDocument18 pagesLinked List Project ReportAyush Sasane50% (2)
- 280 - DS Complete PDFDocument116 pages280 - DS Complete PDFjagaenatorNo ratings yet
- Ds Short LecturesDocument53 pagesDs Short Lecturesamit_coolbuddy20No ratings yet
- DSAL_Ass5_writeupDocument10 pagesDSAL_Ass5_writeupGaurav ShindeNo ratings yet
- Linked List1Document8 pagesLinked List1focaba4283No ratings yet
- Array & Linked ListDocument9 pagesArray & Linked ListArkadeep RoyNo ratings yet
- Act 3 - Linked ListsDocument8 pagesAct 3 - Linked ListsCassie CutieNo ratings yet
- Dsa Viva Questions - Coders LodgeDocument12 pagesDsa Viva Questions - Coders LodgeGulchetan SinghNo ratings yet
- DS 2Document15 pagesDS 2aayush bhatiaNo ratings yet
- Linked Lists: Definition, Representation, Operations & ApplicationsDocument34 pagesLinked Lists: Definition, Representation, Operations & ApplicationsHimanshu RanjanNo ratings yet
- Advanced C Concepts and Programming: First EditionFrom EverandAdvanced C Concepts and Programming: First EditionRating: 3 out of 5 stars3/5 (1)
- 42KHD005N16 High Performance Smart Flat Panel Air ConditionerDocument4 pages42KHD005N16 High Performance Smart Flat Panel Air ConditionerIrvan RamadhaniNo ratings yet
- Repeat Analysis For Feb'12Document105 pagesRepeat Analysis For Feb'12Noopur DugarNo ratings yet
- Ferro/Rebar Scanning Report For Agrabad WASA Staff Quarter (East Side Building)Document21 pagesFerro/Rebar Scanning Report For Agrabad WASA Staff Quarter (East Side Building)Biprojit HoreNo ratings yet
- 4.1 (2) Cisco Unified Communications Manager Administrative XML Developer GuideDocument18 pages4.1 (2) Cisco Unified Communications Manager Administrative XML Developer GuideVipin GopinathanNo ratings yet
- Kadiri Municipality: Town Planning Section Building Permit OrderDocument3 pagesKadiri Municipality: Town Planning Section Building Permit OrderMadhusudhana Reddy MalakaNo ratings yet
- Create A Larger Casper-Rw Loop File in Linux - USB Pen Drive LinuxDocument2 pagesCreate A Larger Casper-Rw Loop File in Linux - USB Pen Drive LinuxReaperGod 245No ratings yet
- Configure Cisco SD-WAN for Multi-Tenant EnvironmentsDocument12 pagesConfigure Cisco SD-WAN for Multi-Tenant Environmentssoumen1977No ratings yet
- Quality Characteristics of Functional and Non Functional TestingDocument74 pagesQuality Characteristics of Functional and Non Functional TestinggoshoNo ratings yet
- Gateway CaseDocument10 pagesGateway CaseSomesh KhandelwalNo ratings yet
- TR-069 - A Crash Course: University of New Hampshire Interoperability Laboratory 2009Document62 pagesTR-069 - A Crash Course: University of New Hampshire Interoperability Laboratory 2009guru87.joshi3473No ratings yet
- Jeep WK Grand Cherokee Section 08O RestraintsDocument490 pagesJeep WK Grand Cherokee Section 08O RestraintsParaskevas Stav100% (5)
- The Belt Conveyor: A Concise Basic CourseDocument58 pagesThe Belt Conveyor: A Concise Basic Courseiman zareie0% (1)
- Trinh Bui Resume 10 20 2020Document1 pageTrinh Bui Resume 10 20 2020api-531960027No ratings yet
- Application Note #4424: Programming MATLAB With Galil ControllersDocument12 pagesApplication Note #4424: Programming MATLAB With Galil ControllerssamanNo ratings yet
- TLE-ICT-CSS 10-Q1 - ICCS Week 1Document17 pagesTLE-ICT-CSS 10-Q1 - ICCS Week 1jayson santosNo ratings yet
- Project Execution ModelDocument99 pagesProject Execution ModelEdha Ali100% (3)
- DX DiagDocument32 pagesDX DiagholomarocorpNo ratings yet
- Vy Unit 3 Test - Storage Devices and MediaDocument4 pagesVy Unit 3 Test - Storage Devices and Mediaapi-327072135100% (1)
- RIDGID A-Frame Fault LocatorDocument2 pagesRIDGID A-Frame Fault LocatorNazeer AhmedNo ratings yet
- Lecture 5: IPC - Semaphore and Shared Memory: Message QueuesDocument6 pagesLecture 5: IPC - Semaphore and Shared Memory: Message Queuessamir2013No ratings yet
- Design Review AI: ScopeDocument17 pagesDesign Review AI: ScopeAurunisbi Aldino AuliaNo ratings yet
- Qse q9 QB Owners ManualDocument36 pagesQse q9 QB Owners ManualCarlos CarlosNo ratings yet
- C5 X7 Fuses LegendDocument9 pagesC5 X7 Fuses LegendmirelNo ratings yet
- Case AFX-8010 Harvester Service ManualDocument2,688 pagesCase AFX-8010 Harvester Service ManualVITALII V100% (1)
- Company Name - Ashok Leyland. Company Code - Ashok Leyland Nissan VehicleDocument1 pageCompany Name - Ashok Leyland. Company Code - Ashok Leyland Nissan VehicleDevendra ShahNo ratings yet
- Tech and Human DignityDocument7 pagesTech and Human Dignityrosemariegalindo70No ratings yet
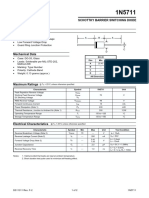
- Schottky Barrier Switching Diode FeaturesDocument2 pagesSchottky Barrier Switching Diode FeaturesОлег КлиновойNo ratings yet
- Document Management - White Paper (M-Files)Document46 pagesDocument Management - White Paper (M-Files)optical420100% (1)
- Workfront Training Handbook - Worker GuideDocument25 pagesWorkfront Training Handbook - Worker Guidesaraes88100% (1)
- MFJ 929 PDFDocument36 pagesMFJ 929 PDFapl_75No ratings yet