You might also like
- Identification and Assessment of A Simplified Model For Vehicle Ride SimulationDocument16 pagesIdentification and Assessment of A Simplified Model For Vehicle Ride SimulationpandiyarajmechNo ratings yet
- Ijmet 08 06 013Document5 pagesIjmet 08 06 013Adina ShaikhNo ratings yet
- Fatigue Analysis and Optimization of Upright of A FSAE VehicleDocument6 pagesFatigue Analysis and Optimization of Upright of A FSAE Vehiclepreetham saiNo ratings yet
- A Driver Model-Based Direct YawDocument13 pagesA Driver Model-Based Direct Yawakareem1755No ratings yet
- Ijmet 09 07 045Document13 pagesIjmet 09 07 045shreyashNo ratings yet
- A Tool For Lap Time SimulationDocument5 pagesA Tool For Lap Time SimulationRodrigo BobNo ratings yet
- Design and Optimization of Hub and Knuckle For Formula SAE CarDocument5 pagesDesign and Optimization of Hub and Knuckle For Formula SAE CarTalles OliveiraNo ratings yet
- Hard Point OptimizationDocument8 pagesHard Point OptimizationAnkitRajNo ratings yet
- Automation of Coach Rollover SimulationDocument8 pagesAutomation of Coach Rollover SimulationAltairEnlightenNo ratings yet
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobNo ratings yet
- Weiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangDocument6 pagesWeiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangMohd SolihinNo ratings yet
- Design & Fabrication of Front Wheel Upright Assembly For An ATVDocument5 pagesDesign & Fabrication of Front Wheel Upright Assembly For An ATVumeshNo ratings yet
- Chassis Structural Design of Track Racing One Manned Formula CarDocument5 pagesChassis Structural Design of Track Racing One Manned Formula CarSyed MajeedNo ratings yet
- RL-04 Vibration Analysis of 2 Wheeler Handle-Bar Mahindra 2WHDocument7 pagesRL-04 Vibration Analysis of 2 Wheeler Handle-Bar Mahindra 2WHashish38799No ratings yet
- DESIGN AND ANALYSIS OF AL 7075 Steering Knuckle PDFDocument7 pagesDESIGN AND ANALYSIS OF AL 7075 Steering Knuckle PDFsanjeev105No ratings yet
- Irjet V7i480Document7 pagesIrjet V7i480DushyantNo ratings yet
- Irjet V6i4302Document3 pagesIrjet V6i4302Azat Adar KaraNo ratings yet
- SAE J2562 - Nov 2005 - Surface Vehicle Recommended PracticeDocument22 pagesSAE J2562 - Nov 2005 - Surface Vehicle Recommended PracticeatulmkaushalNo ratings yet
- 285 June 2994Document7 pages285 June 2994ROHAN SHENDENo ratings yet
- Vehicles 03 00019 v2Document30 pagesVehicles 03 00019 v2Pierre GanNo ratings yet
- Car Wheel Slip Modelling Simulation and Control Us PDFDocument4 pagesCar Wheel Slip Modelling Simulation and Control Us PDFThien MaiNo ratings yet
- ICOME2010 Preda CarSuspensionOptimizationDocument8 pagesICOME2010 Preda CarSuspensionOptimizationSantiago UrgilesNo ratings yet
- Fatigue Analysis of An Automobile Wheel Rim: AbstractDocument10 pagesFatigue Analysis of An Automobile Wheel Rim: AbstractSagar ANo ratings yet
- Simulation of Vehicle Response To Throttle Tip-In and Tip-OutDocument38 pagesSimulation of Vehicle Response To Throttle Tip-In and Tip-OutPablo EscobarNo ratings yet
- ES140205 - Sujit Parmeshwar Narwade 72-80Document9 pagesES140205 - Sujit Parmeshwar Narwade 72-80Kubilay AçıkgözNo ratings yet
- Analysis of Alternative Front Suspension Systems For MotorcyclesDocument10 pagesAnalysis of Alternative Front Suspension Systems For MotorcyclesRasbin SharmaNo ratings yet
- Implementation of Pacejka's AnalyticalDocument42 pagesImplementation of Pacejka's AnalyticalRenan AlvesNo ratings yet
- R04706112117 PDFDocument6 pagesR04706112117 PDFSantiago UrgilesNo ratings yet
- Control of Motorcycles by Variable Geometry Rear SuspensionDocument8 pagesControl of Motorcycles by Variable Geometry Rear SuspensionNadhinas Yusuf SNo ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- Vivek Adap SuspDocument21 pagesVivek Adap SuspMohammed Asif NNo ratings yet
- Torque SteerDocument7 pagesTorque SteerAyushNo ratings yet
- Real Time SimulationDocument7 pagesReal Time SimulationkumarNo ratings yet
- Du Canyi, Zhu Baochai, Wang Hengbo, Mai Xingye and Qin TaixingDocument6 pagesDu Canyi, Zhu Baochai, Wang Hengbo, Mai Xingye and Qin TaixingMaxime MARIOTTINo ratings yet
- Mame2022 1 6Document6 pagesMame2022 1 6Pujo TrihantoroNo ratings yet
- SafetyDocument17 pagesSafetyutkarshNo ratings yet
- Amortisseur Ressort EtudeDocument11 pagesAmortisseur Ressort EtudeSliim AmiriNo ratings yet
- Vehicle Dynamics Analysis and Design For A Narrow Electric VehicleDocument1 pageVehicle Dynamics Analysis and Design For A Narrow Electric VehiclepmaznikerNo ratings yet
- Design Basic of Industrial Gear BoxesDocument84 pagesDesign Basic of Industrial Gear Boxesalfatih1407497100% (2)
- Using Modelica Models For Driver-In-The-loop SimulatorsDocument8 pagesUsing Modelica Models For Driver-In-The-loop SimulatorsRodrigo BobNo ratings yet
- Design Weight Optimization of A Wheel Rim For SporDocument5 pagesDesign Weight Optimization of A Wheel Rim For SporNhật Anh NguyễnNo ratings yet
- Y4592 PDFDocument4 pagesY4592 PDFPrathamesh PatikNo ratings yet
- Na Et Al 2015 Dynamic Vehicle Model For Handling Performance Using Experimental DataDocument12 pagesNa Et Al 2015 Dynamic Vehicle Model For Handling Performance Using Experimental DatamjaiswalNo ratings yet
- Design & Fabrication of Rear Outboard Wheel Assembly For An ATVDocument5 pagesDesign & Fabrication of Rear Outboard Wheel Assembly For An ATVumeshNo ratings yet
- 08 FEM FEA Stress Analysis of A Light Commercial Vehicle Chassis by FEM PiaggioDocument5 pages08 FEM FEA Stress Analysis of A Light Commercial Vehicle Chassis by FEM PiaggioSankalp SharmaNo ratings yet
- Eccm2006 PDFDocument15 pagesEccm2006 PDFSrinivasarao YenigallaNo ratings yet
- Mode Decoupling in Vehicle Suspensions Applied To Race Cars: Basileios Mavroudakis, Peter EberhardDocument15 pagesMode Decoupling in Vehicle Suspensions Applied To Race Cars: Basileios Mavroudakis, Peter EberhardAbhishek yadavNo ratings yet
- Design and Manufacturing of Motorsports PDFDocument10 pagesDesign and Manufacturing of Motorsports PDFVaisakhan.A.SNo ratings yet
- Numerical Estimation of The Torsional Stiffness CHDocument14 pagesNumerical Estimation of The Torsional Stiffness CHKiran ShetNo ratings yet
- Random Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On AnsysDocument4 pagesRandom Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On Ansysbilal sarfrazNo ratings yet
- Preliminary Design ReportDocument8 pagesPreliminary Design ReportAman MaanNo ratings yet
- Modeling Simulation and Validation of 14 DOF Full Vehicle ModelDocument6 pagesModeling Simulation and Validation of 14 DOF Full Vehicle ModelShine Khant Mg MgNo ratings yet
- Design and Analysis of Cam Shaft For Multi Cylinder EngineDocument52 pagesDesign and Analysis of Cam Shaft For Multi Cylinder EngineNationalinstituteDsnr67% (3)
- Brake Report 2015Document38 pagesBrake Report 2015Pratyush NagareNo ratings yet
- Design of Student Formula Race Car Chassis: Abhijeet DasDocument5 pagesDesign of Student Formula Race Car Chassis: Abhijeet DasSammmNo ratings yet
- Suspension AnalysisDocument11 pagesSuspension Analysisanmol6237No ratings yet
- Four Wheel Steering SystemDocument7 pagesFour Wheel Steering SystemAmar JeetNo ratings yet
- Chassis Design Report PDFDocument8 pagesChassis Design Report PDFPrakhar YadavNo ratings yet
- Designing and Fabrication of Compressed Air VehicleDocument70 pagesDesigning and Fabrication of Compressed Air VehicleMuhammad UmairNo ratings yet
- Perkins New 1000 SeriesDocument370 pagesPerkins New 1000 SeriesAnonymous yjK3peI789% (9)
- Características y Parámetros Del Control de Ventilador ISX - Motores CumminsDocument3 pagesCaracterísticas y Parámetros Del Control de Ventilador ISX - Motores Cumminsjuan carlos rojas cadenaNo ratings yet
- Denso Hair Pin Parts CatalogDocument84 pagesDenso Hair Pin Parts CatalogrustyNo ratings yet
- 2015 Brute Force Full LineDocument28 pages2015 Brute Force Full LineTok NazriNo ratings yet
- Meiller 9685 enDocument1 pageMeiller 9685 enpanchitoNo ratings yet
- 2011 Dodge CaliberDocument1 page2011 Dodge CaliberMaria De Los Angeles GuedezNo ratings yet
- 400 Series: Long-Term Power SolutionDocument2 pages400 Series: Long-Term Power SolutionCristian FigueroaNo ratings yet
- Body Mounting Directives FUSO Canter TF Euro5 Oct 2011 enDocument313 pagesBody Mounting Directives FUSO Canter TF Euro5 Oct 2011 enMinh TânNo ratings yet
- Assembling and Testing Manual TransmissionDocument65 pagesAssembling and Testing Manual TransmissionNaive EilevorNo ratings yet
- Lube Oil System: ١ - ﺖﻳﺰﻟا ﻚﻨﺗ nk Oil Ta) 001 BB 10 MBV (Document15 pagesLube Oil System: ١ - ﺖﻳﺰﻟا ﻚﻨﺗ nk Oil Ta) 001 BB 10 MBV (kamal arabNo ratings yet
- ZF 5hp24Document46 pagesZF 5hp24Davidoff Red100% (1)
- 2.8L-4.2L (EDI) (90-860074-1) .Pages.1 26Document26 pages2.8L-4.2L (EDI) (90-860074-1) .Pages.1 26jay hixNo ratings yet
- Sym Gts Servicemanual PDFDocument217 pagesSym Gts Servicemanual PDFAnthony Tarucan BenedictoNo ratings yet
- Hydarulic CylinderDocument36 pagesHydarulic CylinderRepresentaciones Agricolas srlNo ratings yet
- Volvo BL 71 0 GeneralDocument5 pagesVolvo BL 71 0 GeneralVygintas Balcius0% (1)
- 2014 Triumph Tiger 800 XC ABS SEDocument4 pages2014 Triumph Tiger 800 XC ABS SEjoe.babaianNo ratings yet
- EC8 (4EAT) - REAXEL 99-UpDocument4 pagesEC8 (4EAT) - REAXEL 99-UpConstantine MetadrillNo ratings yet
- Slide PresentationDocument36 pagesSlide PresentationSumitha MuniyandiNo ratings yet
- Diesel FuelDocument29 pagesDiesel FuelSisay SolomonNo ratings yet
- Internal Combustion Engine ThesisDocument7 pagesInternal Combustion Engine ThesisJeff Brooks100% (2)
- Operation Manual 1013Document74 pagesOperation Manual 1013nicoss69No ratings yet
- Dimensional Drawing ADV-7941Document2 pagesDimensional Drawing ADV-7941Service Brags & Hayes, Inc.No ratings yet
- Introduction of Pneumatic Brake System - July 31, 2015Document6 pagesIntroduction of Pneumatic Brake System - July 31, 2015hariridkNo ratings yet
- Wheel BalancingDocument8 pagesWheel BalancingkondusamyNo ratings yet
- 6EY18 (A) L (0CH10-M35901 - En)Document221 pages6EY18 (A) L (0CH10-M35901 - En)fendynovapamelaNo ratings yet
- Hykangoo Uk2013Document2 pagesHykangoo Uk2013HasanUSLUMNo ratings yet
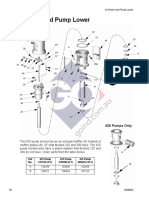
- GO Manual Graco Fire-Ball 425 Parts ListingDocument4 pagesGO Manual Graco Fire-Ball 425 Parts ListingLechelonNo ratings yet
- Design and Failure Analysis of Four Stroke Six Cylinder Diesel Engine CrankshaftDocument5 pagesDesign and Failure Analysis of Four Stroke Six Cylinder Diesel Engine CrankshaftDarmawan PutrantoNo ratings yet
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsFrom EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNo ratings yet
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisFrom EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisRating: 5 out of 5 stars5/5 (1)
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemFrom EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNo ratings yet
- Fire Fighting Pumping Systems at Industrial FacilitiesFrom EverandFire Fighting Pumping Systems at Industrial FacilitiesRating: 4.5 out of 5 stars4.5/5 (3)
- Healthy Buildings: How Indoor Spaces Drive Performance and ProductivityFrom EverandHealthy Buildings: How Indoor Spaces Drive Performance and ProductivityRating: 5 out of 5 stars5/5 (2)
- Redefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesFrom EverandRedefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesNo ratings yet
- A Complete Guide to Safety Officer Interview Questions and AnswersFrom EverandA Complete Guide to Safety Officer Interview Questions and AnswersRating: 4 out of 5 stars4/5 (1)
- Plutopia: Nuclear Families, Atomic Cities, and the Great Soviet and American Plutonium DisastersFrom EverandPlutopia: Nuclear Families, Atomic Cities, and the Great Soviet and American Plutonium DisastersRating: 4 out of 5 stars4/5 (32)
- Rules of Thumb for Maintenance and Reliability EngineersFrom EverandRules of Thumb for Maintenance and Reliability EngineersRating: 4.5 out of 5 stars4.5/5 (12)
- Fundamentals of Risk Management for Process Industry EngineersFrom EverandFundamentals of Risk Management for Process Industry EngineersNo ratings yet
- Epidemiology and Demography in Public HealthFrom EverandEpidemiology and Demography in Public HealthJaphet KillewoRating: 5 out of 5 stars5/5 (1)
- Guidelines for Auditing Process Safety Management SystemsFrom EverandGuidelines for Auditing Process Safety Management SystemsNo ratings yet
- Handbook of Hazardous Chemical PropertiesFrom EverandHandbook of Hazardous Chemical PropertiesRating: 5 out of 5 stars5/5 (1)
- Introduction to Petroleum Process SafetyFrom EverandIntroduction to Petroleum Process SafetyRating: 3 out of 5 stars3/5 (2)
- Electrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EFrom EverandElectrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70ERating: 3 out of 5 stars3/5 (6)
- Trevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationFrom EverandTrevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationNo ratings yet
- What Went Wrong?: Case Histories of Process Plant Disasters and How They Could Have Been AvoidedFrom EverandWhat Went Wrong?: Case Histories of Process Plant Disasters and How They Could Have Been AvoidedRating: 5 out of 5 stars5/5 (2)
- Chemical Process Safety: Learning from Case HistoriesFrom EverandChemical Process Safety: Learning from Case HistoriesRating: 4 out of 5 stars4/5 (14)
- Culture, Health and Illness: An Introduction for Health ProfessionalsFrom EverandCulture, Health and Illness: An Introduction for Health ProfessionalsNo ratings yet
- Workbook to Accompany Maintenance & Reliability Best PracticesFrom EverandWorkbook to Accompany Maintenance & Reliability Best PracticesRating: 3.5 out of 5 stars3.5/5 (3)
- Nutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeFrom EverandNutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeNo ratings yet
- The Invisible Rainbow: A History of Electricity and LifeFrom EverandThe Invisible Rainbow: A History of Electricity and LifeRating: 4.5 out of 5 stars4.5/5 (21)