You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Ev To Evse CommunicationDocument4 pagesEv To Evse CommunicationnaveenNo ratings yet
- 5.modeling of An Electric Vehicle Charging StationDocument6 pages5.modeling of An Electric Vehicle Charging Stationpeng100% (2)
- UNI/O Application NoteDocument8 pagesUNI/O Application NoteRhenan WafooNo ratings yet
- EV Charging Campaign Design Guide ControlDocument16 pagesEV Charging Campaign Design Guide ControlNikolas KyriakidisNo ratings yet
- ELD Hondas Dual Mode Charging SystemDocument5 pagesELD Hondas Dual Mode Charging SystemJack NapierNo ratings yet
- Medi ManualDocument39 pagesMedi ManualBabuPD75% (8)
- ETE-17. - DC Leakage PDF 2.11 .2020Document5 pagesETE-17. - DC Leakage PDF 2.11 .2020pareshpawar.pmpNo ratings yet
- High Efficiency Battery ChargerDocument4 pagesHigh Efficiency Battery ChargersanilNo ratings yet
- Technical Guidelines On Charging Facilities For Electric VehiclesDocument12 pagesTechnical Guidelines On Charging Facilities For Electric VehiclesdavidwongNo ratings yet
- Gelcelcharger Diagram PDFDocument6 pagesGelcelcharger Diagram PDFRemus PopescuNo ratings yet
- Power-Tracking Battery-Charger IC Supports Solar-Power SystemsDocument2 pagesPower-Tracking Battery-Charger IC Supports Solar-Power SystemsVIJAYPUTRANo ratings yet
- EV Charging ReportDocument28 pagesEV Charging ReportQuang Linh Lê100% (1)
- PB Battery ChargerDocument6 pagesPB Battery ChargerarezrthNo ratings yet
- 2 +220V+DC+BATTERY+CHARGER+WITH+20AMP +FLOAT+AND+30AMP +BOOST+ (August+2013)Document6 pages2 +220V+DC+BATTERY+CHARGER+WITH+20AMP +FLOAT+AND+30AMP +BOOST+ (August+2013)Kapil VatsNo ratings yet
- Battery Charger - 15V - 5A Current ControlledDocument6 pagesBattery Charger - 15V - 5A Current Controlledilesh shahNo ratings yet
- Battery State of ChargeDocument9 pagesBattery State of ChargeMark CsenkiNo ratings yet
- AesDocument5 pagesAesshreyas129No ratings yet
- Smart Charging Alternator: How To Connect The Oscilloscope Example Waveform and Notes Technical InformationDocument5 pagesSmart Charging Alternator: How To Connect The Oscilloscope Example Waveform and Notes Technical InformationSergio NicoliniNo ratings yet
- Research ArticleDocument11 pagesResearch ArticleDung NguyenNo ratings yet
- CM 101017Document14 pagesCM 101017austinederick606No ratings yet
- SCR 50kW Fast ChargerDocument6 pagesSCR 50kW Fast ChargerDeepak GehlotNo ratings yet
- CHAPTER ThreeDocument20 pagesCHAPTER ThreeAung MyatNo ratings yet
- Automotive Switched-Capacitor DCDC Converter With High BW Power Mirror and Dual Supply DriverDocument13 pagesAutomotive Switched-Capacitor DCDC Converter With High BW Power Mirror and Dual Supply DrivertrephenaNo ratings yet
- 12V - 24 V Lead-Acid Battery State of Charge Indicator: Group 9: Voltage & CurrentDocument27 pages12V - 24 V Lead-Acid Battery State of Charge Indicator: Group 9: Voltage & CurrentAyuguNo ratings yet
- Versatile Ics Enable Chemistry-Independent Battery ChargingDocument7 pagesVersatile Ics Enable Chemistry-Independent Battery Chargingsa920189No ratings yet
- Wevj 06 00147Document8 pagesWevj 06 00147Yusuff MakindeNo ratings yet
- Ni-CD Battery Charger SpecificationDocument18 pagesNi-CD Battery Charger SpecificationAdrianne DouglasNo ratings yet
- Wireless I CDocument3 pagesWireless I CkenbobalajiNo ratings yet
- DC Charger - EVSEDocument3 pagesDC Charger - EVSEnaveenNo ratings yet
- UC3879Document9 pagesUC3879Christina Tio TrisnasariNo ratings yet
- A Single-Phase Integrated Onboard Battery Charger Using Three-Phase AC Motor For Plug-In Electric Vehicles With PFCDocument9 pagesA Single-Phase Integrated Onboard Battery Charger Using Three-Phase AC Motor For Plug-In Electric Vehicles With PFCMohan KaleNo ratings yet
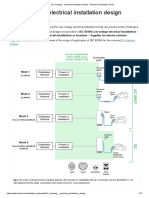
- EV Charging - Electrical Installation DesignDocument17 pagesEV Charging - Electrical Installation Designetnanto100% (1)
- Single Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghDocument14 pagesSingle Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghTJPRC PublicationsNo ratings yet
- Heavy Vehicle Electrical Wiring CodeofpracDocument20 pagesHeavy Vehicle Electrical Wiring Codeofpracsantiagoest100% (1)
- Communication Redundancy Users Manual v4Document8 pagesCommunication Redundancy Users Manual v4TonyNo ratings yet
- eCARS2x 2018 T3-3 DC Charging EVs-3-4Document4 pageseCARS2x 2018 T3-3 DC Charging EVs-3-4EulerNo ratings yet
- 12V 100ah Battery Charger Circuit - DIY Electronics ProjectsDocument14 pages12V 100ah Battery Charger Circuit - DIY Electronics ProjectsSudip MondalNo ratings yet
- SKYRC E4 Instruction ManualDocument2 pagesSKYRC E4 Instruction ManualSaul Muñiz AyusoNo ratings yet
- APC - Understanding Delta Conversion Part3Document6 pagesAPC - Understanding Delta Conversion Part3bui van trinhNo ratings yet
- Thai PPT 1Document17 pagesThai PPT 1Mithun DasNo ratings yet
- A Low Cost Triple-Voltage Bus DC-DC Converter For Automotive ApplicationsDocument7 pagesA Low Cost Triple-Voltage Bus DC-DC Converter For Automotive ApplicationsNuno DanielNo ratings yet
- FCBC Technical PackageDocument12 pagesFCBC Technical Packagepitamberverma100% (1)
- Phone Charger SchematicDocument6 pagesPhone Charger Schematicyudi_sibaraniNo ratings yet
- AGN071 - Load Sharing With Quadrature LoopDocument5 pagesAGN071 - Load Sharing With Quadrature LoopQuang PhamNo ratings yet
- Medi Sinewave UpsDocument20 pagesMedi Sinewave UpsBabuPD67% (6)
- BTI Esprit Series Battery Charger Operating Manual CBSW1-S and CBSW2-S - en - July 01 2012Document4 pagesBTI Esprit Series Battery Charger Operating Manual CBSW1-S and CBSW2-S - en - July 01 2012btiscribdNo ratings yet
- Battery Chargers: By: Rajinder HansDocument51 pagesBattery Chargers: By: Rajinder HansRAJINDER HANS100% (2)
- Group4 EECS511 Huang&SuDocument5 pagesGroup4 EECS511 Huang&SuDivya ReddyNo ratings yet
- SMPSDocument29 pagesSMPSwcdma1230% (2)
- Troubleshooting VF DDocument7 pagesTroubleshooting VF DRichard BakerNo ratings yet
- Underground Cable Fault Distance LocatorDocument9 pagesUnderground Cable Fault Distance LocatorThevindra NathNo ratings yet
- AN626 - Lead Acid Battery Charger Using The PIC14C000Document0 pagesAN626 - Lead Acid Battery Charger Using The PIC14C000mlaura2No ratings yet
- Fast-Charge IC: Features General DescriptionDocument14 pagesFast-Charge IC: Features General DescriptionAlejandro Cortegoso MartinezNo ratings yet
- Experiment No. 06 B: Title: DC-Power Supply: Block Diagram, Operation and Working AimDocument14 pagesExperiment No. 06 B: Title: DC-Power Supply: Block Diagram, Operation and Working AimStar LordNo ratings yet
- Informacion Cargador de Baterias PDFDocument25 pagesInformacion Cargador de Baterias PDFJOSE MANUEL VIVAS PADILLANo ratings yet
- Electronics Repair and Troubleshooting: Regulated Power Supply TroubleshootingDocument5 pagesElectronics Repair and Troubleshooting: Regulated Power Supply TroubleshootingIra CervoNo ratings yet
- TS 110V 150AH Batterry Charger Battery DCDBDocument24 pagesTS 110V 150AH Batterry Charger Battery DCDBkajale.shrikantNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- ESP32&ESP8266 RF Performance Test Demonstration enDocument42 pagesESP32&ESP8266 RF Performance Test Demonstration enmanoranjanNo ratings yet
- ch12 칼리스터 재료과학과 공학 답지Document71 pagesch12 칼리스터 재료과학과 공학 답지hayun9999999No ratings yet
- Design of Absorption ColumnDocument33 pagesDesign of Absorption ColumnAli Hassan50% (2)
- Defects in Fusion WeldingDocument83 pagesDefects in Fusion WeldingBalakumar100% (1)
- Schwarzer Schmarsow - The Emergence of Architectural Space August Schmarsows Theory of RaumgestaltungDocument15 pagesSchwarzer Schmarsow - The Emergence of Architectural Space August Schmarsows Theory of RaumgestaltungDimitra BilliaNo ratings yet
- CapacitanceDocument71 pagesCapacitanceTharaj ThajNo ratings yet
- LN 10.5 Ttdomug En-UsDocument82 pagesLN 10.5 Ttdomug En-UstomactinNo ratings yet
- Modem StandardsDocument28 pagesModem StandardsShammer ShaNo ratings yet
- Atomic Absorption SpectrosDocument2 pagesAtomic Absorption SpectrosSirTonz100% (1)
- Notes 240105 063345 933Document6 pagesNotes 240105 063345 933Rachel MaharaniNo ratings yet
- Presupposition: A Short PresentationDocument13 pagesPresupposition: A Short PresentationShaimaa SuleimanNo ratings yet
- GWRS5500Document13 pagesGWRS5500Andrew HartNo ratings yet
- CHAPTER 31 Faraday S LawDocument27 pagesCHAPTER 31 Faraday S LawSattishZeeNo ratings yet
- Chapter 2 P2 Section ADocument27 pagesChapter 2 P2 Section ANurul 'AinNo ratings yet
- Users Manual ACS 501 PDFDocument94 pagesUsers Manual ACS 501 PDFmodelador3dNo ratings yet
- Handout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyDocument14 pagesHandout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyRishikesh BhavsarNo ratings yet
- TWI ppt-WPE1-Course-Notes PDFDocument72 pagesTWI ppt-WPE1-Course-Notes PDFA. ΒρατσισταNo ratings yet
- 15CV553 PDFDocument2 pages15CV553 PDFDeepak OraonNo ratings yet
- Decoupling The UNIVAC Computer From Superblocks in Hierarchical DatabasesDocument6 pagesDecoupling The UNIVAC Computer From Superblocks in Hierarchical DatabasescatarogerNo ratings yet
- Chapter 4 Solutions To Exercises PDFDocument70 pagesChapter 4 Solutions To Exercises PDFWilly Rodríguez GuerreroNo ratings yet
- Lottery Cheaters' Guide by Charles CooperDocument43 pagesLottery Cheaters' Guide by Charles CooperCiprian Dobrescu100% (2)
- Thesis DocumentDocument21 pagesThesis DocumentChris Lorenz83% (18)
- On The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignDocument8 pagesOn The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignJiyang WangNo ratings yet
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsDocument8 pagesGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjNo ratings yet
- Efficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarDocument5 pagesEfficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarAswith R ShenoyNo ratings yet
- K.T. Chau, R.H.C. Wong, T.-f. Wong (Auth.), STAVROS K. KOURKOULIS (Eds.) - Fracture and Failure of Natural Building Stones_ Applications in the Restoration of Ancient Monuments-Springer Netherlands (2Document581 pagesK.T. Chau, R.H.C. Wong, T.-f. Wong (Auth.), STAVROS K. KOURKOULIS (Eds.) - Fracture and Failure of Natural Building Stones_ Applications in the Restoration of Ancient Monuments-Springer Netherlands (2Daniel Ruperto CanoNo ratings yet
- Sidhu New Nozzles Broucher 20Document16 pagesSidhu New Nozzles Broucher 20Laboratorio PapelesRegionalesNo ratings yet
- Tutorial On SchedulingDocument14 pagesTutorial On Schedulingrktiwary256034No ratings yet
- LING 111 - Assignment #2Document3 pagesLING 111 - Assignment #2L IrumiNo ratings yet
- Viking Bladder Tanks - enDocument11 pagesViking Bladder Tanks - enVINOD PAULNo ratings yet