You might also like
- Game Development with Unreal Engine 5: Learn the Basics of Game Development in Unreal Engine 5 (English Edition)From EverandGame Development with Unreal Engine 5: Learn the Basics of Game Development in Unreal Engine 5 (English Edition)No ratings yet
- Corporate-Level Strategy Apple Inc.Document13 pagesCorporate-Level Strategy Apple Inc.Weird skinsNo ratings yet
- 1.2 Uses of Computer GraphicsDocument19 pages1.2 Uses of Computer GraphicsAmrutha dNo ratings yet
- Chapter 6 P1Document62 pagesChapter 6 P1john1x96No ratings yet
- Kivy Cookbook - Sample ChapterDocument33 pagesKivy Cookbook - Sample ChapterPackt PublishingNo ratings yet
- Developing A GUI in C++ and DirectXDocument49 pagesDeveloping A GUI in C++ and DirectXBelhassen LourimiNo ratings yet
- Cómo Usar Working ModelDocument12 pagesCómo Usar Working ModelJorgeLuNo ratings yet
- Game Development PersonalDocument2 pagesGame Development PersonalSelenHomezNo ratings yet
- Input in Unity v1.0.2Document74 pagesInput in Unity v1.0.2GlasDev GuyNo ratings yet
- Peripheral and Interfacing AssignmentDocument20 pagesPeripheral and Interfacing AssignmentAriyan KhanNo ratings yet
- NGUI For Unity: Chapter No. 3 "Enhancing Your UI"Document31 pagesNGUI For Unity: Chapter No. 3 "Enhancing Your UI"Packt PublishingNo ratings yet
- Game Programming Lab Assignment - 3: Name: Asmit Gupta REG NO: 18BCE0904 SLOT: L47+L48 Faculty: Prof Natarajan PDocument5 pagesGame Programming Lab Assignment - 3: Name: Asmit Gupta REG NO: 18BCE0904 SLOT: L47+L48 Faculty: Prof Natarajan Pasmit guptaNo ratings yet
- Research Paper VTSDocument14 pagesResearch Paper VTSMohammad AtifNo ratings yet
- REPORT2Document39 pagesREPORT2jaiswal1000No ratings yet
- Activity Guide - Loops Make - Unit 5 Lesson 8Document2 pagesActivity Guide - Loops Make - Unit 5 Lesson 8Luke EverhardtNo ratings yet
- 1.1 Introduction To Computer Graphics: User InterfacesDocument13 pages1.1 Introduction To Computer Graphics: User InterfacesManish ReddyNo ratings yet
- ACE BootcampDocument3 pagesACE BootcampRovin GarciaNo ratings yet
- Code Snippets Updated For Blender 258Document178 pagesCode Snippets Updated For Blender 258jlbb@click21.com.br0% (1)
- Twenty Images With Ids "Icon0", "Icon1" "Icon19" "Colors Button" "Locatio Nsbutto N" "Shapes Button" "Homes Creen"Document2 pagesTwenty Images With Ids "Icon0", "Icon1" "Icon19" "Colors Button" "Locatio Nsbutto N" "Shapes Button" "Homes Creen"Deven BaliNo ratings yet
- Ui - Native GUI For iOS - Python 3.6.1 DocumentationDocument79 pagesUi - Native GUI For iOS - Python 3.6.1 Documentationaasief sahiboNo ratings yet
- Gui in Matlab: Group: 4Document23 pagesGui in Matlab: Group: 4Simrandeep SinghNo ratings yet
- Practical No 9Document10 pagesPractical No 9sayedshaad02No ratings yet
- Graphical User Interface (Gui) Lab: Guis in IdlDocument9 pagesGraphical User Interface (Gui) Lab: Guis in IdlDalip SainiNo ratings yet
- LAB 2 Hello ToastDocument24 pagesLAB 2 Hello ToastShahira ShahirNo ratings yet
- Practical Week 2 GUI Construction: Exercise 1 Digital StopwatchDocument4 pagesPractical Week 2 GUI Construction: Exercise 1 Digital StopwatchDe-Young Precious OyetNo ratings yet
- Project TIC Tak Toe Using PythonDocument8 pagesProject TIC Tak Toe Using PythonAkash K VarmaNo ratings yet
- CGV M5Document75 pagesCGV M5Pawan SNo ratings yet
- Introduction To Scripting With Unity: 1. Aims of This TutorialDocument10 pagesIntroduction To Scripting With Unity: 1. Aims of This TutorialAjay Ghale100% (1)
- Logitech Mouse PDFDocument8 pagesLogitech Mouse PDFShivang MishraNo ratings yet
- Virtual Mouse Using Artificial IntelligenceDocument8 pagesVirtual Mouse Using Artificial IntelligenceVIVA-TECH IJRINo ratings yet
- Experiment No. 4 Aim: Theory:: Write A Mobile Application To CalculatorDocument8 pagesExperiment No. 4 Aim: Theory:: Write A Mobile Application To Calculatoryo fireNo ratings yet
- Assignment 4: Character Animation and Simulation: CS 248 Winter 2017-2018 Due Date: Monday, 26 February by 6:30pmDocument3 pagesAssignment 4: Character Animation and Simulation: CS 248 Winter 2017-2018 Due Date: Monday, 26 February by 6:30pmclaudia tapiaNo ratings yet
- Manual VREasy V1.3 PDFDocument59 pagesManual VREasy V1.3 PDFDarmawan MuhaiminNo ratings yet
- Tkinter Tutorial For BeginnersDocument23 pagesTkinter Tutorial For BeginnersA Walí DexentNo ratings yet
- System ArchitectireDocument8 pagesSystem ArchitectireASTHA THAKURNo ratings yet
- Unity Game Development ScriptingDocument27 pagesUnity Game Development ScriptingChang Jae Lee0% (1)
- Fendy Ibrahim c1255201033Document3 pagesFendy Ibrahim c1255201033Sarah JohnsonNo ratings yet
- Unity Programming GameDocument24 pagesUnity Programming Gamebolibolibalu100% (1)
- Chapter 4Document71 pagesChapter 4Sidra KhatoonNo ratings yet
- Virtual Screen SaverDocument15 pagesVirtual Screen SaverM.Saad SiddiquiNo ratings yet
- Programming Assignment 3 (100 Points) : Start Early!Document8 pagesProgramming Assignment 3 (100 Points) : Start Early!allen xuNo ratings yet
- PDF 20231018 081017 0000Document42 pagesPDF 20231018 081017 0000arpitakar838No ratings yet
- Fig. 11.1 The: Model-View-Controller ArchitectureDocument18 pagesFig. 11.1 The: Model-View-Controller ArchitectureYashashwiniNo ratings yet
- Smart Application Layouts With Windows FormsDocument13 pagesSmart Application Layouts With Windows Formsinfo.glcom5161No ratings yet
- Unity Scripting TutorialDocument10 pagesUnity Scripting TutorialAdnan AhsanNo ratings yet
- Introduction: How To Make A Main Menu in UnityDocument12 pagesIntroduction: How To Make A Main Menu in UnityjorgernesNo ratings yet
- 6.813/6.831 - User Interface Design and Implementation: Problem 1: Dragging Checkers (40%)Document4 pages6.813/6.831 - User Interface Design and Implementation: Problem 1: Dragging Checkers (40%)Diman IonutNo ratings yet
- Getting Started With NottorusDocument9 pagesGetting Started With NottorusYare MawuviNo ratings yet
- Internal Components of A Computer. Input / Output Devices Starter Task With Post Its - 1) Label The Different Devices in The Room. 2) Write On Them Whether You Think They Are Input or Output DevicesDocument6 pagesInternal Components of A Computer. Input / Output Devices Starter Task With Post Its - 1) Label The Different Devices in The Room. 2) Write On Them Whether You Think They Are Input or Output Devicesinformaticacuenta4178No ratings yet
- Unity 3D UI Essentials Sample ChapterDocument49 pagesUnity 3D UI Essentials Sample ChapterPackt PublishingNo ratings yet
- Project Report Vipul ND RaghavDocument23 pagesProject Report Vipul ND RaghavVipul BhagiaNo ratings yet
- Project Report Oop Group 9Document13 pagesProject Report Oop Group 9kiwi93520No ratings yet
- Untitled DocumentDocument6 pagesUntitled DocumentRoopan RajuNo ratings yet
- Calculator Using C#Document35 pagesCalculator Using C#Precious Andoy-MegabonNo ratings yet
- Custom Button States:: CPSC 441 - Mobile Application Development Lecture #5Document12 pagesCustom Button States:: CPSC 441 - Mobile Application Development Lecture #5GuksungAnNo ratings yet
- Beginning Unity Editor Scripting: Create and Publish Your Game ToolsFrom EverandBeginning Unity Editor Scripting: Create and Publish Your Game ToolsNo ratings yet
- Beginning Unity Android Game Development: From Beginner to ProFrom EverandBeginning Unity Android Game Development: From Beginner to ProNo ratings yet
- Lawrence&Pasternack - Ch02 - LPILP ModelsDocument57 pagesLawrence&Pasternack - Ch02 - LPILP ModelsDanielFilippoFernandesHellichNo ratings yet
- CV HieuHoangDocument4 pagesCV HieuHoangsriram.nganapathyNo ratings yet
- CHAPTER 1 IntroductionDocument12 pagesCHAPTER 1 IntroductionKetul ShahNo ratings yet
- Computer Generation ICT MANSADocument28 pagesComputer Generation ICT MANSApauletseyazametiNo ratings yet
- Manual EG2003 360 Gettingstarted PDFDocument127 pagesManual EG2003 360 Gettingstarted PDFJOYCENo ratings yet
- FileCloud 20 - 1 SyncDocument130 pagesFileCloud 20 - 1 Syncife iflNo ratings yet
- Question Bank For Unit-1Document5 pagesQuestion Bank For Unit-1Micheal StoneNo ratings yet
- Human FactorDocument388 pagesHuman FactorSamir OgbiNo ratings yet
- Lab 09 Handout Universal Shift RegisterDocument4 pagesLab 09 Handout Universal Shift RegisterMuhammad SaudNo ratings yet
- Coatron A4: Fully Automated Hemostasis AnalyzerDocument6 pagesCoatron A4: Fully Automated Hemostasis AnalyzerThe KaiTo GamerNo ratings yet
- Aeon Wave HandoutsDocument13 pagesAeon Wave HandoutsJohn ParkerNo ratings yet
- EEB443 Test2 With Solutions - 2022Document12 pagesEEB443 Test2 With Solutions - 2022Jakisee KavezeriNo ratings yet
- Techniques For Implementing Multipliers in Stratix, Stratix GX & Cyclone DevicesDocument40 pagesTechniques For Implementing Multipliers in Stratix, Stratix GX & Cyclone DevicesAhmed HamoudaNo ratings yet
- ExportDocument13 pagesExportianz sarmientoNo ratings yet
- Selenium Automation Engineer: Sandeep Kumar DurvasulaDocument3 pagesSelenium Automation Engineer: Sandeep Kumar Durvasulasuraj satavNo ratings yet
- Europass Curriculum Vitae: Personal Information István TalmácsiDocument3 pagesEuropass Curriculum Vitae: Personal Information István TalmácsiTalmácsi IstvánNo ratings yet
- 4 NPL Loop StatementsDocument38 pages4 NPL Loop Statementsbinhkatekun2002No ratings yet
- Nudi Help PDFDocument29 pagesNudi Help PDFnagarajappabNo ratings yet
- HGI Catalog PDFDocument33 pagesHGI Catalog PDFYaqien ChusnoelNo ratings yet
- Assignment-4 Noc18 cs52 87Document9 pagesAssignment-4 Noc18 cs52 87Ishaan naulakhaNo ratings yet
- OCPJPDocument140 pagesOCPJPSaiKiran TanikantiNo ratings yet
- EMERGINGfinal EXAMDocument4 pagesEMERGINGfinal EXAMMubaarak Nuur100% (1)
- Beckhoff and TwinCAT GuideDocument17 pagesBeckhoff and TwinCAT Guidevoltus88No ratings yet
- TS2021 Short User Guide EN PDFDocument29 pagesTS2021 Short User Guide EN PDFVictor FlorinNo ratings yet
- Unisteri HP IlDocument11 pagesUnisteri HP Ilastro79No ratings yet
- Training PLC and VI BrochureDocument2 pagesTraining PLC and VI BrochureBaishakhi BoseNo ratings yet
- TMA AnalysisDocument17 pagesTMA AnalysissamNo ratings yet
- Nse4 Infraestructura 351-387Document37 pagesNse4 Infraestructura 351-387leydis GarciaNo ratings yet
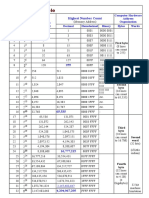
- Powers of 2 Table - Vaughn's SummariesDocument2 pagesPowers of 2 Table - Vaughn's SummariesAnonymous NEqv0Uy7KNo ratings yet