You might also like
- WirelessHART - Implementation and Evaluation On Wireless SensorsDocument51 pagesWirelessHART - Implementation and Evaluation On Wireless Sensorstanathos18No ratings yet
- Bluetooth 5.0 Modem Design For IoT DevicesDocument120 pagesBluetooth 5.0 Modem Design For IoT DevicesMarcos AlcatNo ratings yet
- Xenomai ImplementationDocument92 pagesXenomai ImplementationSyed Abrar AlviNo ratings yet
- DataCenter Design GuideDocument86 pagesDataCenter Design Guidebudai8886% (7)
- Web DevelopmentDocument27 pagesWeb DevelopmentR KNo ratings yet
- Distech Network Guide PDFDocument78 pagesDistech Network Guide PDFLougan Luz100% (1)
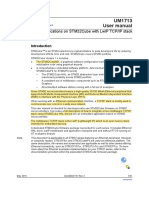
- Um1713 User Manual: Developing Applications On Stm32Cube With Lwip Tcp/Ip StackDocument41 pagesUm1713 User Manual: Developing Applications On Stm32Cube With Lwip Tcp/Ip Stackc.cesco8703No ratings yet
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideFrom EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideRating: 5 out of 5 stars5/5 (2)
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsFrom EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsRating: 5 out of 5 stars5/5 (6)
- Networks on Chips: Technology and ToolsFrom EverandNetworks on Chips: Technology and ToolsRating: 5 out of 5 stars5/5 (3)
- 28 PLC QuantumDocument335 pages28 PLC Quantumnamhts100% (1)
- Can Open Interface A PiDocument25 pagesCan Open Interface A PiEwerton BianchiNo ratings yet
- Sap Fiori 2.0 For Sap Hcm1Document220 pagesSap Fiori 2.0 For Sap Hcm1Abdullah SalehNo ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- AZ204 Important Que YouTube Free PDFDocument65 pagesAZ204 Important Que YouTube Free PDFyobihNo ratings yet
- Modicon Quantum CatalogueDocument384 pagesModicon Quantum CataloguekiranascNo ratings yet
- Beowulf SetupDocument46 pagesBeowulf SetupBiswa DuttaNo ratings yet
- Getting Started With TCP - IP For VSE - ESA 1.4Document254 pagesGetting Started With TCP - IP For VSE - ESA 1.4aksmsaidNo ratings yet
- Overview of Computer Networks: Norman Matloff Dept. of Computer Science University of California at Davis CDocument29 pagesOverview of Computer Networks: Norman Matloff Dept. of Computer Science University of California at Davis Ckanhaiya.singh9No ratings yet
- Adding Ethernet Connectivity To DSP-Based Systems: M. Nashaat Soliman Novra Technologies IncDocument15 pagesAdding Ethernet Connectivity To DSP-Based Systems: M. Nashaat Soliman Novra Technologies IncthirusriviNo ratings yet
- CAN Ethernet Gateway ManualDocument32 pagesCAN Ethernet Gateway Manualiwan sanusiNo ratings yet
- Tutorial Wireless Sensor Network SimulationDocument16 pagesTutorial Wireless Sensor Network SimulationKing Bolade Proxy-AdewaleNo ratings yet
- Study of IoT Communication ProtocolsDocument26 pagesStudy of IoT Communication ProtocolsRitesh PatelNo ratings yet
- Mainframe y NetworkingDocument412 pagesMainframe y Networkingcisco sd wanNo ratings yet
- Nexans Tracking SystemDocument122 pagesNexans Tracking SystemHuy G. CuNo ratings yet
- Pynq ClassificationDocument65 pagesPynq Classificationlahcen.asstNo ratings yet
- Memory Map of OMAPDocument12 pagesMemory Map of OMAPhemantgarg2001No ratings yet
- 1703 Heaton 3080 PaperDocument24 pages1703 Heaton 3080 PaperSalimElzwawiNo ratings yet
- Real-Time Computer Vision Processing On A Wearable SystemDocument16 pagesReal-Time Computer Vision Processing On A Wearable SystemSyllogismRXSNo ratings yet
- DES-1228P: User ManualDocument100 pagesDES-1228P: User ManualSuhaimi KasimNo ratings yet
- Supervisory Control and Data Acquisition System Design For CO2 Enhanced Oil RecoveryDocument26 pagesSupervisory Control and Data Acquisition System Design For CO2 Enhanced Oil RecoveryMartino Ojwok AjangnayNo ratings yet
- 17-TCP Acceleration OptionDocument38 pages17-TCP Acceleration Optionnguyentienduy1512No ratings yet
- Developing Applications On STM32Cube With LwIP TCP-IP StackDocument44 pagesDeveloping Applications On STM32Cube With LwIP TCP-IP StackVport Port100% (1)
- KP184 - Exe v1 - 0 User ManualDocument65 pagesKP184 - Exe v1 - 0 User ManualJuan Guillermo CardenasNo ratings yet
- enDocument10 pagesenlololiliNo ratings yet
- SciNet TutorialDocument22 pagesSciNet Tutorialddsk86No ratings yet
- Dataflow Supercomputing Essentials: Algorithms, Applications and ImplementationsDocument157 pagesDataflow Supercomputing Essentials: Algorithms, Applications and ImplementationsMaurizio VivianiNo ratings yet
- UM1709 User Manual: STM32Cube Ethernet IAP ExampleDocument22 pagesUM1709 User Manual: STM32Cube Ethernet IAP ExampleTameClaudioNo ratings yet
- LTE Technical Reference Manual: © Mentum S.A., October 2010 All Rights ReservedDocument64 pagesLTE Technical Reference Manual: © Mentum S.A., October 2010 All Rights ReservedpsquallNo ratings yet
- Internet Protocol Architectures and Network ProgrammingDocument84 pagesInternet Protocol Architectures and Network ProgrammingMeag GhnNo ratings yet
- Mid Report PdlabDocument11 pagesMid Report PdlabSunil GudivadaNo ratings yet
- Manual For Using Super Computing ResourcesDocument22 pagesManual For Using Super Computing ResourcesusmanNo ratings yet
- Project CatalogueDocument21 pagesProject CatalogueSinshaw BekeleNo ratings yet
- eBUS SDK C++ API Quick Start Guide PDFDocument39 pageseBUS SDK C++ API Quick Start Guide PDFTrinh LeNo ratings yet
- Computer Networks and Its TypesDocument17 pagesComputer Networks and Its TypesMr.KingTvNo ratings yet
- Tcpip For WSNDocument134 pagesTcpip For WSNathaur1992No ratings yet
- Cygnus 517Document125 pagesCygnus 517nitin chaurasia0% (2)
- Intelligent Data Acquisition SystemDocument5 pagesIntelligent Data Acquisition Systemjoey AlibabaNo ratings yet
- Industrial Networking SystemsDocument28 pagesIndustrial Networking Systemsمصطفى الكوتNo ratings yet
- Custom Windows NT 4.0 Parallel Port Device Driver: A Component of A Network Performance Measurement ToolDocument37 pagesCustom Windows NT 4.0 Parallel Port Device Driver: A Component of A Network Performance Measurement ToolMike ThomsonNo ratings yet
- Mobile Comms ThesisDocument44 pagesMobile Comms ThesisMichael Snook100% (1)
- Radar and Sensor Data Transport SolutionsDocument24 pagesRadar and Sensor Data Transport SolutionsPTNo ratings yet
- RFC 6272Document66 pagesRFC 6272JersonAgudeloVeraNo ratings yet
- SmartFusion Modbus TCP Demo Using LwIP and FreeRTOS UGDocument24 pagesSmartFusion Modbus TCP Demo Using LwIP and FreeRTOS UGJose LunaNo ratings yet
- Fast LinkDocument33 pagesFast LinkBoris D'Angles WoolcottNo ratings yet
- I BeaconyxyDocument44 pagesI Beaconyxytarik marrakechNo ratings yet
- Quantum Catalogue September 2004Document390 pagesQuantum Catalogue September 2004Donni AzharNo ratings yet
- etg100Document78 pagesetg100oscar perezNo ratings yet
- 4G Wireless SystemsDocument38 pages4G Wireless SystemsKannan BalajiNo ratings yet
- Adapter Hub AtmDocument326 pagesAdapter Hub AtmAshish JainNo ratings yet
- Anynet Sna Over TcpipDocument262 pagesAnynet Sna Over TcpipIno Gomez Larroza100% (1)
- W465-E1-05 CS-CJ Ethernet IP Operation ManualDocument464 pagesW465-E1-05 CS-CJ Ethernet IP Operation ManualsisifoefiraNo ratings yet
- Mobile Messaging Technologies and Services: SMS, EMS and MMSFrom EverandMobile Messaging Technologies and Services: SMS, EMS and MMSRating: 5 out of 5 stars5/5 (2)
- Anastiuk Front-End EN CVDocument2 pagesAnastiuk Front-End EN CVdse6023No ratings yet
- Building A Job Board With Next - JS, Tailwind CSS, and StrapiDocument13 pagesBuilding A Job Board With Next - JS, Tailwind CSS, and StrapiabriyoNo ratings yet
- Performance Testing EssentialsDocument13 pagesPerformance Testing EssentialsAMIT MISHRANo ratings yet
- Amplify Apim Refenv Userguide 7.7 20210130Document41 pagesAmplify Apim Refenv Userguide 7.7 20210130alazzariNo ratings yet
- The New Era of Full Stack DevelopersDocument4 pagesThe New Era of Full Stack DevelopersUrmila VermaNo ratings yet
- Cover Letter For Java ProfessionalDocument5 pagesCover Letter For Java Professionalgt72k5e5100% (1)
- Best Software Development Company in LucknowDocument1 pageBest Software Development Company in LucknowSofttrix Software100% (1)
- Higher Nationals in Computing: Unit 2: Web Design and Development Assignment 2Document59 pagesHigher Nationals in Computing: Unit 2: Web Design and Development Assignment 2Tấn Nghĩa LêNo ratings yet
- Cranes Varsity Embedded Systems Internship (40Document6 pagesCranes Varsity Embedded Systems Internship (40Harsha G HNo ratings yet
- WDC Mini Project ReportDocument20 pagesWDC Mini Project Reportramtej1217No ratings yet
- Drupal Manual - Regional ClientDocument14 pagesDrupal Manual - Regional ClientTamar NaskidashviliNo ratings yet
- Car Rental Django PresentationDocument37 pagesCar Rental Django PresentationDeepak VermaNo ratings yet
- Hydrology 1Document2 pagesHydrology 1Engr AbirNo ratings yet
- Rajiv S ResumeDocument1 pageRajiv S ResumeSambhav GandhiNo ratings yet
- Zuri 2022 ReportDocument12 pagesZuri 2022 ReportIwuchukwu ChiomaNo ratings yet
- Ey The Software Driven Revolution Redefining The Automotive IndustryDocument21 pagesEy The Software Driven Revolution Redefining The Automotive Industryamr salahNo ratings yet
- Armand Asnani Resume PDFDocument1 pageArmand Asnani Resume PDFNiharika ChowdharyNo ratings yet
- FinanceManager ReportDocument25 pagesFinanceManager Reportsachinsachitha1321No ratings yet
- MERN-Stack Developer AssessmentDocument2 pagesMERN-Stack Developer AssessmentShivam muskNo ratings yet
- LCDCDDocument1 pageLCDCDemmashomebizNo ratings yet
- TRC Salary Survey 23-24 - 231025 - 163633Document48 pagesTRC Salary Survey 23-24 - 231025 - 163633Софья ИсаеваNo ratings yet
- AWS Foundation Module 9 Lambda Beanstalk OpsWorks PDFDocument82 pagesAWS Foundation Module 9 Lambda Beanstalk OpsWorks PDFSUNIL THAKURNo ratings yet
- Viktor Klymets Fullstack Developer ResumeDocument3 pagesViktor Klymets Fullstack Developer ResumeKlymets ViktorNo ratings yet
- What Does A Software Engineer DoDocument6 pagesWhat Does A Software Engineer DoAlhasan A. RayyanNo ratings yet
- Andrew Wells CVDocument3 pagesAndrew Wells CVEric SilvermanNo ratings yet
- Resume Shrrayan Sheel GoelDocument2 pagesResume Shrrayan Sheel GoeluditNo ratings yet
- Contoh Resume ATS FriendlyDocument3 pagesContoh Resume ATS FriendlyDanielNo ratings yet