You might also like
- Abortion Remedies From A Medieval Catholic Nun (!) - JSTOR DailyDocument12 pagesAbortion Remedies From A Medieval Catholic Nun (!) - JSTOR DailysiesmannNo ratings yet
- Aakash Zoology Study Package 3 SolutionsssssssDocument104 pagesAakash Zoology Study Package 3 SolutionsssssssRishika PaulNo ratings yet
- Bruce Lyon - Occult CosmologyDocument55 pagesBruce Lyon - Occult Cosmologyeponymos100% (1)
- b0700sv F PDFDocument188 pagesb0700sv F PDFabdel taibNo ratings yet
- CT PhysicsDocument117 pagesCT PhysicsGarima Bharti100% (2)
- SocketCAN, The Official CAN API of The Linux KernelDocument6 pagesSocketCAN, The Official CAN API of The Linux KernelTice HarmanNo ratings yet
- Unit 1 - Cumulus Linux OverviewDocument26 pagesUnit 1 - Cumulus Linux Overviewhouman100% (2)
- SAN Solution AssessmentDocument14 pagesSAN Solution AssessmentKals ShanmugamNo ratings yet
- LEED v4 For Interior Design and Construction ChecklistDocument3 pagesLEED v4 For Interior Design and Construction Checklisttarek.abbas8598No ratings yet
- Socket CANDocument25 pagesSocket CANMandeep SinghNo ratings yet
- Hagen Woesner Open Source VBNG Architecture and Performance EvaluationDocument40 pagesHagen Woesner Open Source VBNG Architecture and Performance EvaluationSatyaki StudentNo ratings yet
- Lista 3 MatemáticaDocument14 pagesLista 3 MatemáticamvlellisNo ratings yet
- Bacnet Gateway: GeneralDocument2 pagesBacnet Gateway: GeneralFabián Roberto NoyaNo ratings yet
- RTC Magazine June 2006Document76 pagesRTC Magazine June 2006Jake NadudiNo ratings yet
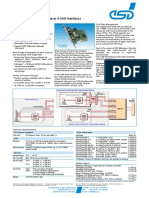
- Can-Pcie402 Datasheet en 1Document2 pagesCan-Pcie402 Datasheet en 1陳AnitaNo ratings yet
- 1.IOS XR - Intro-UseDocument68 pages1.IOS XR - Intro-Useagus kurniawanNo ratings yet
- Compactpci 9056Rdk-860: Rapid Development Kit For Pci 9056 With Motorola Powerquicc DesignsDocument2 pagesCompactpci 9056Rdk-860: Rapid Development Kit For Pci 9056 With Motorola Powerquicc DesignsYACINE NABILNo ratings yet
- n5k Ops FabricpathDocument16 pagesn5k Ops FabricpathNabil MesbahiNo ratings yet
- Brkewn 3013Document118 pagesBrkewn 3013para275No ratings yet
- Connectx-6 DX Cards Product BriefDocument3 pagesConnectx-6 DX Cards Product BriefTaty ElejaldeNo ratings yet
- Adq Using SPDK SB UnlockedDocument13 pagesAdq Using SPDK SB Unlocked张凯强No ratings yet
- CAP5Document5 pagesCAP5Ri VMNo ratings yet
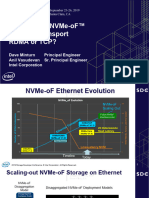
- SNIA-SDC19-Selecting - An - NVMe - Over - Fabrics - Ethernet - Transport - RDMA - or - TCP 2019Document21 pagesSNIA-SDC19-Selecting - An - NVMe - Over - Fabrics - Ethernet - Transport - RDMA - or - TCP 2019James ZhangNo ratings yet
- Fastsocket: Speed Up Your SocketDocument51 pagesFastsocket: Speed Up Your SocketAkikoYuukiNo ratings yet
- Cisco CRS1 Port OC-768C STM 256C Tunable WDMPOSDocument5 pagesCisco CRS1 Port OC-768C STM 256C Tunable WDMPOSWaleed MareeNo ratings yet
- Xps EpcDocument50 pagesXps EpcAK SinghNo ratings yet
- Netronome-Ovs Offload PDFDocument18 pagesNetronome-Ovs Offload PDFsunnyb77No ratings yet
- Future Hardware Platform Technologies: Alexander Sack, Senior DeveloperDocument49 pagesFuture Hardware Platform Technologies: Alexander Sack, Senior DeveloperJahn TerbinNo ratings yet
- IEEE 802.15.4 Packet Analysis With Wireshark and Off-The-Shelf HardwareDocument4 pagesIEEE 802.15.4 Packet Analysis With Wireshark and Off-The-Shelf HardwareNischith HosmaneNo ratings yet
- Single Network Emulation Platform: Unified Networking Lab Unified Networking Lab by Andrea DaineseDocument11 pagesSingle Network Emulation Platform: Unified Networking Lab Unified Networking Lab by Andrea DaineseRama Adi SanjayaNo ratings yet
- Netx Brochure BR 2012-11 ENDocument7 pagesNetx Brochure BR 2012-11 ENrwe sfwNo ratings yet
- The Complete Cisco Nexus VPC Guide. Features & Advantages, Design Guidelines, Configuration, Failure Scenarios, Troubleshooting, VSS Vs VPCDocument30 pagesThe Complete Cisco Nexus VPC Guide. Features & Advantages, Design Guidelines, Configuration, Failure Scenarios, Troubleshooting, VSS Vs VPCReginaldoNo ratings yet
- HardwareDocument22 pagesHardwareFachrurroziAsNo ratings yet
- A Datacenter Network Architecture For Low Latency Automation and VirtualizationDocument3 pagesA Datacenter Network Architecture For Low Latency Automation and VirtualizationstevencuiNo ratings yet
- Snapmac: A Generic Mac/Phy Architecture Enabling Flexible Mac DesignDocument50 pagesSnapmac: A Generic Mac/Phy Architecture Enabling Flexible Mac DesignIsrar UllahNo ratings yet
- Datasheet Ecu TestDocument2 pagesDatasheet Ecu Testsa ltyNo ratings yet
- Open Source Whitebox Router PDFDocument13 pagesOpen Source Whitebox Router PDFtobecaNo ratings yet
- QLE8142 DatasheetDocument2 pagesQLE8142 Datasheetanurag911No ratings yet
- BRKSPG 3616Document72 pagesBRKSPG 3616cool dude911No ratings yet
- Com 4C Pe PDFDocument4 pagesCom 4C Pe PDFAlejandro Cáceres Navarro (Ingenova)No ratings yet
- Flex PodDocument7 pagesFlex PodalokmalakarNo ratings yet
- CycloneTCP BrochureDocument3 pagesCycloneTCP BrochureWagner LoebelNo ratings yet
- UCS BootCamp PDFDocument306 pagesUCS BootCamp PDFtorrezmNo ratings yet
- Cavium - Networks CN7010 1000BG640 CP G DatasheetDocument2 pagesCavium - Networks CN7010 1000BG640 CP G DatasheetMan Debug0No ratings yet
- Freescale Table For MemoryDocument2 pagesFreescale Table For MemoryamenstoNo ratings yet
- Advanced OpenStack NetworkingDocument63 pagesAdvanced OpenStack Networkingmohamed abdoNo ratings yet
- SMOptics Catalog - March 2022Document4 pagesSMOptics Catalog - March 2022Hoang MinhNo ratings yet
- Software Guidance: Cisco Application Centric InfrastructureDocument4 pagesSoftware Guidance: Cisco Application Centric InfrastructureLuis RodriguesNo ratings yet
- Network Interface Card (Nic) Smartnic: - LL in Part, PL in Total Are Implemented in NicDocument12 pagesNetwork Interface Card (Nic) Smartnic: - LL in Part, PL in Total Are Implemented in NicFatma ÖzdemirNo ratings yet
- Moxa Iopac 8600 Series Datasheet v1.6Document7 pagesMoxa Iopac 8600 Series Datasheet v1.6vinay moogiNo ratings yet
- Sdr-Infocom Brazil 2009 v1-1Document64 pagesSdr-Infocom Brazil 2009 v1-1Nha BanNo ratings yet
- Clustering Tech OverviewDocument48 pagesClustering Tech Overviewyums30No ratings yet
- (Switching) : Cisco Certified Network AssociateDocument43 pages(Switching) : Cisco Certified Network AssociateMukesh RaiyaNo ratings yet
- Getting Started With Proprietary Wireless: What Is Rail and What Is ConnectDocument24 pagesGetting Started With Proprietary Wireless: What Is Rail and What Is ConnectLe HieuNo ratings yet
- PROJECDocument2 pagesPROJECAyush ChaudharyNo ratings yet
- High Performance, Low Profile, Dual Port 1/10/25gbe Unified Wire AdapterDocument2 pagesHigh Performance, Low Profile, Dual Port 1/10/25gbe Unified Wire AdapterLeonNo ratings yet
- Ethereal Troubleshooting: Info SheetDocument4 pagesEthereal Troubleshooting: Info SheetMiguelangel Bravo MigoneNo ratings yet
- Programming Environments On Sahasrat (Cray-Xc40 System)Document38 pagesProgramming Environments On Sahasrat (Cray-Xc40 System)dhruvbhagtaniNo ratings yet
- Thenewsystemsperformance 131014005720 Phpapp01Document17 pagesThenewsystemsperformance 131014005720 Phpapp01csy365No ratings yet
- Brkarc 3454Document117 pagesBrkarc 3454agcauchiNo ratings yet
- Optimizing Converged Cisco Networks (Ont) : Module 4: Implement The Diffserv Qos ModelDocument19 pagesOptimizing Converged Cisco Networks (Ont) : Module 4: Implement The Diffserv Qos ModelccazorlaqscNo ratings yet
- Tinyos Tutorial: Chien-Liang Fok Cs521 Fall 2004Document72 pagesTinyos Tutorial: Chien-Liang Fok Cs521 Fall 2004Uday KulkarniNo ratings yet
- VLANS and Broadcast DomainsDocument5 pagesVLANS and Broadcast Domainsartsan3No ratings yet
- Freescale'S Zigbee Technology Products SummaryDocument2 pagesFreescale'S Zigbee Technology Products SummaryIon TomitaNo ratings yet
- An451 PDFDocument26 pagesAn451 PDFblue 1234No ratings yet
- Discussion 2 Module 2 - Paronda PDFDocument1 pageDiscussion 2 Module 2 - Paronda PDFAlvanna ParondaNo ratings yet
- Pedia 2017 Case ProtocolDocument14 pagesPedia 2017 Case ProtocolArjay Amba0% (1)
- Question Bank For Chapter#6Document11 pagesQuestion Bank For Chapter#6krishnam rajuNo ratings yet
- 8484.sensor CEM Diagnostic Tests User Manual v3.1.0Document28 pages8484.sensor CEM Diagnostic Tests User Manual v3.1.0Edgar FuentesNo ratings yet
- 2018-Me-184 MMDocument28 pages2018-Me-184 MMKhizer Nauman RanaNo ratings yet
- Comparative Study of Conventional and Generative Design ProcessDocument11 pagesComparative Study of Conventional and Generative Design ProcessIJRASETPublicationsNo ratings yet
- Solution Manual For Laboratory Manual in Physical Geology 11th by American Geological InstituteDocument9 pagesSolution Manual For Laboratory Manual in Physical Geology 11th by American Geological InstituteKarenAcevedotkoi100% (40)
- Backpacking South America Travel Guide 2020Document59 pagesBackpacking South America Travel Guide 2020sarthak.j6969No ratings yet
- 2019 MIPS Quality Historic BenchmarksDocument158 pages2019 MIPS Quality Historic BenchmarksJoe GellatlyNo ratings yet
- SG5.0 20RT UEN Ver13 202101Document105 pagesSG5.0 20RT UEN Ver13 202101Asep SaepudinNo ratings yet
- Hemiplegia LectureDocument37 pagesHemiplegia LectureRancesh FamoNo ratings yet
- Wanderer Above The Sea of FogDocument5 pagesWanderer Above The Sea of FogMaria Angelika BughaoNo ratings yet
- Deep Carbon ObservatoryDocument90 pagesDeep Carbon ObservatorygoblinNo ratings yet
- Aeration PaperDocument11 pagesAeration PapersehonoNo ratings yet
- Lesson 3.1 Algebraic TermsDocument4 pagesLesson 3.1 Algebraic TermsCresencia Juliana DaluzNo ratings yet
- Scorpio PDFDocument3 pagesScorpio PDFnimi2364010No ratings yet
- HVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004Document4 pagesHVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004leivajNo ratings yet
- Module 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Document36 pagesModule 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Kimberly Jean LautrizoNo ratings yet
- EN 14103 - ThermoDocument4 pagesEN 14103 - ThermoLuciana TrisnaNo ratings yet
- CMC 2023 Senior Category Question BankDocument5 pagesCMC 2023 Senior Category Question BankNikita AgrawalNo ratings yet
- HP COMPAQ D330UT-Network & InternetDocument20 pagesHP COMPAQ D330UT-Network & Internetgebo_manNo ratings yet
- Features and Highlights - : CapableDocument2 pagesFeatures and Highlights - : CapableaarianNo ratings yet
- The Meal Must Go On-Student VersionDocument4 pagesThe Meal Must Go On-Student VersionSheena ViloriaNo ratings yet
- NCERT Class 7 English Part 1 PDFDocument157 pagesNCERT Class 7 English Part 1 PDFVvs SadanNo ratings yet