You might also like
- Data Structure BCA Array-LinkedlistDocument68 pagesData Structure BCA Array-LinkedlistrajNo ratings yet
- Advanced C Concepts and Programming: First EditionFrom EverandAdvanced C Concepts and Programming: First EditionRating: 3 out of 5 stars3/5 (1)
- Unit 1Document14 pagesUnit 12004pujadasNo ratings yet
- A979968895 - 21482 - 28 - 2020 - Ds 1-Basic Data StructureDocument65 pagesA979968895 - 21482 - 28 - 2020 - Ds 1-Basic Data StructureIshant PareekNo ratings yet
- Data Structure & AlgorithmDocument36 pagesData Structure & AlgorithmRubab AnamNo ratings yet
- REVIEWER OF DSA MidtermDocument10 pagesREVIEWER OF DSA Midterm2BSCS-1Cordova Whennel E.No ratings yet
- 1.introduction DS Unit-1Document39 pages1.introduction DS Unit-1v.c cNo ratings yet
- Arrays 1D and 2DDocument30 pagesArrays 1D and 2DGourab NandaNo ratings yet
- Data Structure FinDocument20 pagesData Structure FinSalim Shadman AnkurNo ratings yet
- Unit-1 Notes - Data StructureDocument153 pagesUnit-1 Notes - Data Structureatulshukla.socialNo ratings yet
- DS-Unit-1-Introduction To Data StructureDocument20 pagesDS-Unit-1-Introduction To Data StructureSanskruti DhananiNo ratings yet
- Lecture 2 AoaDocument38 pagesLecture 2 AoaMuhammad AsimNo ratings yet
- Introduction To Data Structure and AlgorithmDocument2 pagesIntroduction To Data Structure and AlgorithmanjanaNo ratings yet
- LMNs - Algorithms - GeeksforGeeksDocument6 pagesLMNs - Algorithms - GeeksforGeeksAnchal RajpalNo ratings yet
- What Is A Data Structure?: Data Structures in Data ScienceDocument24 pagesWhat Is A Data Structure?: Data Structures in Data ScienceMeghna ChoudharyNo ratings yet
- Introduction To Data StructuresDocument27 pagesIntroduction To Data StructuresPratibha BahugunaNo ratings yet
- CH 3Document72 pagesCH 3Maria GrizeldaNo ratings yet
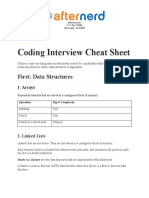
- Coding Interview Cheat SheetDocument5 pagesCoding Interview Cheat SheetManish Bhatt100% (1)
- DS Note by Kaustav SirDocument11 pagesDS Note by Kaustav Sirwowafer745No ratings yet
- Chapter 1Document7 pagesChapter 1Tanvi ChimanNo ratings yet
- Data Structure Question BankDocument24 pagesData Structure Question BankRahul KumarNo ratings yet
- Dsa Basic Data StructureDocument72 pagesDsa Basic Data StructureVamsi PradeepNo ratings yet
- ADA PPTs (Merged) A2 BatchDocument319 pagesADA PPTs (Merged) A2 BatchAayushNo ratings yet
- Introduction To Data Structures: Sonal Pandey Nitttr CHDDocument53 pagesIntroduction To Data Structures: Sonal Pandey Nitttr CHDsonalNo ratings yet
- Abstract Data Type List ADTDocument40 pagesAbstract Data Type List ADTAnonymous 04Gc05OeCNo ratings yet
- DSA 1 (Concept of Data Structures)Document7 pagesDSA 1 (Concept of Data Structures)surazyadav21No ratings yet
- Data Structures & Its ApplicationDocument138 pagesData Structures & Its ApplicationPushpeshNo ratings yet
- Data Structures & Its Application-2Document356 pagesData Structures & Its Application-2ankithavv13No ratings yet
- CSE110 - Array SlideDocument34 pagesCSE110 - Array SlideRatul HasanNo ratings yet
- 1 DsaDocument46 pages1 Dsaabhinavreddy3057No ratings yet
- Data StructuresDocument31 pagesData StructuresAnjali BodaniNo ratings yet
- Lecture 5: Linear Sorting: ReviewDocument5 pagesLecture 5: Linear Sorting: ReviewVan Vy HongNo ratings yet
- Lecture 1:introduction To Data Structure and Algorithms: Mohsin Raza KhanDocument35 pagesLecture 1:introduction To Data Structure and Algorithms: Mohsin Raza KhanHaya NageenNo ratings yet
- Object Oriented Programming: DR O.RifiDocument32 pagesObject Oriented Programming: DR O.RifiInfo PlusNo ratings yet
- JEDI Slides-DataSt-Chapter01-Basic Concepts and NotationsDocument23 pagesJEDI Slides-DataSt-Chapter01-Basic Concepts and NotationsAbdreyll GerardNo ratings yet
- Introduction To MATLAB: April Liu 3/2019 UCMDocument41 pagesIntroduction To MATLAB: April Liu 3/2019 UCMMissmatNo ratings yet
- Unit 1 - Data Structure UsingDocument25 pagesUnit 1 - Data Structure UsingRushikeshNo ratings yet
- Introduction and ArrayDocument36 pagesIntroduction and Array20DIT001 VIDHI BHANDERINo ratings yet
- Tumkur University: Department of Studies and Research in Computer ApplicationsDocument20 pagesTumkur University: Department of Studies and Research in Computer Applicationsnishanth gowda18No ratings yet
- Data Structures Lec PDFDocument156 pagesData Structures Lec PDFTigabu YayaNo ratings yet
- 01 Handout 1Document1 page01 Handout 1TEAM PAHIRAPNo ratings yet
- Unit 1Document13 pagesUnit 1Siddhesh PatilNo ratings yet
- C++ STL Guide - STL Operations and Time Complexities - LeetCode DiscussDocument1 pageC++ STL Guide - STL Operations and Time Complexities - LeetCode DiscussNishant MishraNo ratings yet
- 5635 Grammar As A Foreign LanguageDocument9 pages5635 Grammar As A Foreign LanguageXristos BeretisNo ratings yet
- Study Material On Data Structure and AlgorithmsDocument43 pagesStudy Material On Data Structure and AlgorithmsGod is every whereNo ratings yet
- BakaDocument85 pagesBakaM NarendranNo ratings yet
- Data StructureT1Document11 pagesData StructureT1Md. EmdadNo ratings yet
- A1022850719 - 21482 - 20 - 2019 - Ds 1 Introduction To Data StructuresDocument41 pagesA1022850719 - 21482 - 20 - 2019 - Ds 1 Introduction To Data Structuresanon_128430609No ratings yet
- 02 Data Types and Data StructuresDocument62 pages02 Data Types and Data StructuresAshraf Uzzaman SalehNo ratings yet
- Fundamentals of Data Structure: - Niraj AgarwalDocument176 pagesFundamentals of Data Structure: - Niraj Agarwaljeysam100% (1)
- Numerical and Scientific Computing in Python: v0.1 Spring 2019Document46 pagesNumerical and Scientific Computing in Python: v0.1 Spring 2019lelsyngamiNo ratings yet
- Ds 1basic Data StructurenewDocument41 pagesDs 1basic Data StructurenewSahil SharmaNo ratings yet
- PG C++Document267 pagesPG C++Radhiya devi C0% (1)
- DatastructureDocument11 pagesDatastructurePRADYUMNA KULKARNINo ratings yet
- Lecture 2.2.1Document18 pagesLecture 2.2.1deadlygamer6996No ratings yet
- 280 - DS Complete PDFDocument116 pages280 - DS Complete PDFjagaenatorNo ratings yet
- DS Unit 1Document32 pagesDS Unit 1Deepak YadavNo ratings yet
- Data Structure Note by Bhupendra SaudDocument135 pagesData Structure Note by Bhupendra SaudNa V INNo ratings yet
- Data Struct Algo Exam2 Review2Document1 pageData Struct Algo Exam2 Review2gauron87No ratings yet
- Data Structure & Algorithm AssignmentDocument4 pagesData Structure & Algorithm AssignmentNazmus M Sakib100% (1)
- Java Day1Document78 pagesJava Day1Hemanth Kumar Reddy YedulaNo ratings yet
- UNIT 1 - Intro and InstallationDocument19 pagesUNIT 1 - Intro and InstallationReynante UrsulumNo ratings yet
- 5.study Experiment On NOS and DOSDocument9 pages5.study Experiment On NOS and DOSShashank GosaviNo ratings yet
- MatrikonOPC Server For Siemens PLCs User Manual (074-178) (006-105)Document100 pagesMatrikonOPC Server For Siemens PLCs User Manual (074-178) (006-105)Luis Claudio RamosNo ratings yet
- How To Install Zimbra 8 (UBUNTU-SERVER)Document7 pagesHow To Install Zimbra 8 (UBUNTU-SERVER)Eduin CadeteNo ratings yet
- Fix Operation Failed With Error 0x0000011B (Windows Cannot Connect To The Printer) PASTI BISAAAADocument15 pagesFix Operation Failed With Error 0x0000011B (Windows Cannot Connect To The Printer) PASTI BISAAAAZhakaria Berta PentakostantaNo ratings yet
- Microcontroller Unit2 - 2.1Document23 pagesMicrocontroller Unit2 - 2.1Priyanka S LNo ratings yet
- 4.2.2.2 Common Problems and Solutions For Storage DevicesDocument2 pages4.2.2.2 Common Problems and Solutions For Storage DevicesBuuh SANo ratings yet
- Obilor Computer LiteracyDocument31 pagesObilor Computer LiteracybenobilorNo ratings yet
- LAB ACTIVITY 1: Fundamentals of Database Management System: Duration: 4 Hours Learning OutcomesDocument9 pagesLAB ACTIVITY 1: Fundamentals of Database Management System: Duration: 4 Hours Learning Outcomesrosdi jkmNo ratings yet
- CS8691 Unit1 ARTIFICIAL INTELLIGENCE Regulation 2017Document88 pagesCS8691 Unit1 ARTIFICIAL INTELLIGENCE Regulation 2017JEYANTHI maryNo ratings yet
- Awash Valley CollegeDocument2 pagesAwash Valley CollegeHaccee TubeNo ratings yet
- Bit Sindri: Information and TechnologyDocument67 pagesBit Sindri: Information and TechnologyYash MaheshwariNo ratings yet
- Light Meter: Operation ManualDocument26 pagesLight Meter: Operation ManualMarcos Calixto LopezNo ratings yet
- Class 3 Comp Worksheet No3Document3 pagesClass 3 Comp Worksheet No3vmhsphysics100% (3)
- Screen Exit - ME21N - ME22N - ME23N - Header - SAPCODESDocument11 pagesScreen Exit - ME21N - ME22N - ME23N - Header - SAPCODESjayaNo ratings yet
- 20BCE1723 Java Da1Document6 pages20BCE1723 Java Da1DINESH RAGAV N 20BCE1723No ratings yet
- Sample Letter of Recommendation by Employer For Computer Science or Engineering Students PDFDocument3 pagesSample Letter of Recommendation by Employer For Computer Science or Engineering Students PDFgutswe100% (5)
- 1.system PartioningDocument32 pages1.system PartioningvenkateshNo ratings yet
- Module 1Document136 pagesModule 1Neha VenugopalNo ratings yet
- BA VKR C4 TVW enDocument237 pagesBA VKR C4 TVW enemersonNo ratings yet
- GF 202 Loop Check Analogue Input Rev02 - CGC01Document244 pagesGF 202 Loop Check Analogue Input Rev02 - CGC01Gürkan SaltıkNo ratings yet
- Liebert Apm 400 600 Kva BrochureDocument8 pagesLiebert Apm 400 600 Kva BrochureHATIM KATAWALANo ratings yet
- Intelligent Traffic Management in SDN IJERTV6IS050410Document5 pagesIntelligent Traffic Management in SDN IJERTV6IS050410Engr XsadNo ratings yet
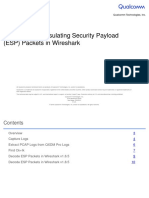
- TCN Tutorial Decoding ESP Packets in WiresharkDocument12 pagesTCN Tutorial Decoding ESP Packets in WiresharkpruebaceluNo ratings yet
- Dynata-W@H Tech Setup Guide Version 5.5Document9 pagesDynata-W@H Tech Setup Guide Version 5.5Ja Nice0% (2)
- PTC 46Document67 pagesPTC 46Mohammad MohammadPourNo ratings yet
- Var El Document - Queryselector ('H1') Console - Log ('El:', El)Document8 pagesVar El Document - Queryselector ('H1') Console - Log ('El:', El)Yesmine MakkesNo ratings yet
- Bca Second SemesterDocument14 pagesBca Second SemesterSandeep PalNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsFrom EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNo ratings yet
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureFrom EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureNo ratings yet