You might also like
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- A Perimeter Control Strategy For Oversaturated Network Preventing Queue SpillbackDocument10 pagesA Perimeter Control Strategy For Oversaturated Network Preventing Queue Spillbackyb741879No ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- System Optimal Time - Dependent PathDocument10 pagesSystem Optimal Time - Dependent PathShangbo WangNo ratings yet
- Knowledge Based Traffic Signal Control Model For Signalized IntersectionDocument5 pagesKnowledge Based Traffic Signal Control Model For Signalized IntersectionLuis Alberto VelasquezNo ratings yet
- Neural Networks For Real-Time Traffic Signal Control (Srinivasan Et Al., 2006)Document12 pagesNeural Networks For Real-Time Traffic Signal Control (Srinivasan Et Al., 2006)chanwengqiuNo ratings yet
- Optimizing Signal Timing Control For Large Urban Traffic Networks Using An Adaptive Linear Quadratic Regulator Control StrategyDocument12 pagesOptimizing Signal Timing Control For Large Urban Traffic Networks Using An Adaptive Linear Quadratic Regulator Control StrategyAdriano MedeirosNo ratings yet
- A Simple Method For Estimation of Queue Length: Digitalcommons@University of Nebraska - LincolnDocument6 pagesA Simple Method For Estimation of Queue Length: Digitalcommons@University of Nebraska - LincolnAltaf HossainNo ratings yet
- Transportation and Traffic TheoryDocument21 pagesTransportation and Traffic TheorysaobracajniNo ratings yet
- Processes 09 01786 v2Document19 pagesProcesses 09 01786 v2Amul ShresthaNo ratings yet
- IET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalDocument13 pagesIET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalXia YangNo ratings yet
- Automated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssDocument31 pagesAutomated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssMuhammad HassnainNo ratings yet
- DiCesare1994 Chapter TheApplicationOfPetriNetsToTheDocument14 pagesDiCesare1994 Chapter TheApplicationOfPetriNetsToThechongqi heNo ratings yet
- International Journal of Transportation Science and TechnologyDocument13 pagesInternational Journal of Transportation Science and TechnologyWILMAR PEÑANo ratings yet
- A Deterministic and Stochastic Petri Net Model For Traffic-Responsive Signaling Control in Urban AreasDocument15 pagesA Deterministic and Stochastic Petri Net Model For Traffic-Responsive Signaling Control in Urban Areasnaumanhaider007No ratings yet
- 1 s2.0 S0743731522000636 MainDocument14 pages1 s2.0 S0743731522000636 MainVinniNo ratings yet
- Literature Review On Saturation Flow at Signalized Intersection Under Mixed Traffic Flow ConditionDocument4 pagesLiterature Review On Saturation Flow at Signalized Intersection Under Mixed Traffic Flow ConditionIJSTENo ratings yet
- Accuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolDocument5 pagesAccuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolNGUYEN MANHNo ratings yet
- Ad Hoc Networks: Hyeong-Jun Chang, Gwi-Tae ParkDocument10 pagesAd Hoc Networks: Hyeong-Jun Chang, Gwi-Tae ParkMOHAMMAD ABU KHALIFANo ratings yet
- International Journal of Transportation Science and TechnologyDocument14 pagesInternational Journal of Transportation Science and TechnologySYIFA ABIYU SAGITA 08211840000099No ratings yet
- Unicast Routing Protocols For Urban Vehicular Networks: Review, Taxonomy, and Open Research IssuesDocument25 pagesUnicast Routing Protocols For Urban Vehicular Networks: Review, Taxonomy, and Open Research IssuesadeelNo ratings yet
- Developing Combined Genetic Algorithm-Hill-ClimbinDocument40 pagesDeveloping Combined Genetic Algorithm-Hill-Climbinفخرالدين محمد باقر فخرالدينNo ratings yet
- Systematic ReviewDocument24 pagesSystematic ReviewMOHAMMAD ABU KHALIFANo ratings yet
- Intelligent Traffic Light Flow Control System UsinDocument17 pagesIntelligent Traffic Light Flow Control System UsinLawrence Emmanuel FerrerasNo ratings yet
- Sensors - Mobilr Fading Channels-18-00475Document19 pagesSensors - Mobilr Fading Channels-18-00475Tenda TiyNo ratings yet
- A New Analytical Approach To Evaluate The Critical-Event Probability Due To WirelessDocument13 pagesA New Analytical Approach To Evaluate The Critical-Event Probability Due To Wirelessgetachew-hagos.geletaNo ratings yet
- Traffic Data Collection and AnalysisDocument14 pagesTraffic Data Collection and AnalysisSimranjit Singh MarwahNo ratings yet
- Full Download Book Data Driven Traffic Engineering Understanding of Traffic and Applications Based On Three Phase Traffic Theory PDFDocument41 pagesFull Download Book Data Driven Traffic Engineering Understanding of Traffic and Applications Based On Three Phase Traffic Theory PDFkelly.smith888100% (14)
- Studies On The Performance Characteristics of A Typical Collision-Free Transportation SystemDocument7 pagesStudies On The Performance Characteristics of A Typical Collision-Free Transportation SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Transito y Transporte Art.Document5 pagesTransito y Transporte Art.Eduardo PuentesNo ratings yet
- Wireless Sensor Traffic Information Collection System Based On Congestion Control AlgorithmDocument8 pagesWireless Sensor Traffic Information Collection System Based On Congestion Control AlgorithmAli ZafarNo ratings yet
- Attitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutDocument8 pagesAttitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutAlok MandalNo ratings yet
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- Transport Capacity ConstraintsDocument11 pagesTransport Capacity ConstraintsOmkar ParishwadNo ratings yet
- TRAFFIC ENGINEERING MIDTERM SOLUTIONS - ÇAĞDAŞ ESMER-dönüştürüldüDocument3 pagesTRAFFIC ENGINEERING MIDTERM SOLUTIONS - ÇAĞDAŞ ESMER-dönüştürüldüÇağdaş EsmerNo ratings yet
- Sustainability 13 08324 v2Document21 pagesSustainability 13 08324 v2ahmad almannaiNo ratings yet
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 pagesInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Two-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactDocument9 pagesTwo-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactsparkshockNo ratings yet
- An Iot Based Intelligent Traffic Congestion Control System For Road CrossingsDocument5 pagesAn Iot Based Intelligent Traffic Congestion Control System For Road CrossingsAli ZafarNo ratings yet
- Traffic Engineering Highway Capacity Manual 2010: Uninterrupted Traffic Flow Dr. Drago SeverDocument34 pagesTraffic Engineering Highway Capacity Manual 2010: Uninterrupted Traffic Flow Dr. Drago SeverFrancisco GranadosNo ratings yet
- Collective Traffic ForecastingDocument15 pagesCollective Traffic ForecastingnaufraghiNo ratings yet
- The Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart CityDocument4 pagesThe Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart Citymohamed salamaNo ratings yet
- Smart Intersection Design For Traffic Pedestrian ADocument7 pagesSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaNo ratings yet
- Dynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesDocument11 pagesDynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesJulina Jerez AbadiesNo ratings yet
- Evaluating The Emission of CO2 at Traffic Intersections With The Purpose of Reducing Emission Rate, Case Study: The University of Nigeria, NsukkaDocument9 pagesEvaluating The Emission of CO2 at Traffic Intersections With The Purpose of Reducing Emission Rate, Case Study: The University of Nigeria, NsukkaIEREKPRESSNo ratings yet
- Condition Monitoring Opportunities Using Vehicle-Based SensorsDocument19 pagesCondition Monitoring Opportunities Using Vehicle-Based SensorsRăzvan PopaNo ratings yet
- Research Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsDocument14 pagesResearch Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsVishalBeheraNo ratings yet
- Electronics 11 00465 v2Document20 pagesElectronics 11 00465 v2Tùng HàNo ratings yet
- Modeling Connectivity of Inter-Vehicle Communication Systems With Road-Side StationsDocument6 pagesModeling Connectivity of Inter-Vehicle Communication Systems With Road-Side Stationsralucutza_neculaNo ratings yet
- Self-Control of Traffic Lights and Vehicle Flows in Urban Road NetworksDocument36 pagesSelf-Control of Traffic Lights and Vehicle Flows in Urban Road NetworksJamel LassouedNo ratings yet
- 1 s2.0 S0968090X22003680 MainDocument25 pages1 s2.0 S0968090X22003680 Mainwhiteyaksha24No ratings yet
- CN PDFDocument12 pagesCN PDFanon_863369228No ratings yet
- Sensor Location Model For O D Estimation Multi Cri - 2019 - Operations ResearchDocument12 pagesSensor Location Model For O D Estimation Multi Cri - 2019 - Operations ResearchEtetu AbeshaNo ratings yet
- Design of Analytical Model and Algorithm For Optimal Roadside Ap Placement in VanetsDocument11 pagesDesign of Analytical Model and Algorithm For Optimal Roadside Ap Placement in VanetsArash AziminejadNo ratings yet
- Transportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TDocument15 pagesTransportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TSulav KafleNo ratings yet
- Density Based Traffic Signal SystemDocument6 pagesDensity Based Traffic Signal SystemAbdulSubhan OwaisiNo ratings yet
- Real-Time Counting of Vehicles Stopped at A Traffic Light Using Vehicular Network TechnologyDocument21 pagesReal-Time Counting of Vehicles Stopped at A Traffic Light Using Vehicular Network Technologymanuel contrerasNo ratings yet
- A Broadcast Vehicle To Vehicle Communication SysteDocument7 pagesA Broadcast Vehicle To Vehicle Communication Syste다원시스No ratings yet
- Adaptive Traffic Lights Using Car-to-Car CommunicationDocument5 pagesAdaptive Traffic Lights Using Car-to-Car CommunicationKay O KayNo ratings yet
- Density Based Traffic Signal System: I J I R S E TDocument6 pagesDensity Based Traffic Signal System: I J I R S E TDidier Alejandro TobonNo ratings yet
- 1990 TDM OverviewJAPADocument16 pages1990 TDM OverviewJAPAAditya DeshpandeNo ratings yet
- ICG CLO PrimerDocument8 pagesICG CLO PrimerAditya DeshpandeNo ratings yet
- SFA CLO White Paper PrimerDocument20 pagesSFA CLO White Paper PrimerAditya DeshpandeNo ratings yet
- CLO Primer PinebridgeDocument16 pagesCLO Primer PinebridgeAditya DeshpandeNo ratings yet
- NCFM Insurance ModuleDocument92 pagesNCFM Insurance ModuleBronil D'abreoNo ratings yet
- Variance AnalysisDocument64 pagesVariance AnalysisAditya DeshpandeNo ratings yet
- FA Wireless Enterprise App DistributionDocument14 pagesFA Wireless Enterprise App DistributionAditya DeshpandeNo ratings yet
- The Objective-C Programming LanguageDocument137 pagesThe Objective-C Programming LanguageMichael KingNo ratings yet
- Kjfkkdca PDF 1664747616Document57 pagesKjfkkdca PDF 1664747616MrDragon TVNo ratings yet
- Jeppview For Windows: General Information General InformationDocument18 pagesJeppview For Windows: General Information General InformationUNKBNo ratings yet
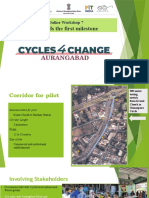
- Aurangabad - C4C W7Document14 pagesAurangabad - C4C W7ITDP IndiaNo ratings yet
- PEDESTRIANIZATIONEVALUATIONTOOLVER220210614 FinalDocument21 pagesPEDESTRIANIZATIONEVALUATIONTOOLVER220210614 FinalAditi AiswaryaNo ratings yet
- Road Safety Awareness ProgramDocument5 pagesRoad Safety Awareness Programsimon maaaklaNo ratings yet
- Aerpace - Revolutionizing Conventional Modes of TransportationDocument2 pagesAerpace - Revolutionizing Conventional Modes of Transportationgreenelli98No ratings yet
- RFID InstallationDocument5 pagesRFID InstallationEarl Cuesta100% (1)
- Case Study - ExpresswayDocument8 pagesCase Study - ExpresswayVNo ratings yet
- 0001 001 PDFDocument224 pages0001 001 PDFHamid MarjiNo ratings yet
- Impact Attuneator Structure DetailsDocument68 pagesImpact Attuneator Structure DetailsShashikant VermaNo ratings yet
- Studi Penentuan Nilai Ekivalensi Mobil PDocument11 pagesStudi Penentuan Nilai Ekivalensi Mobil Pabdul marufNo ratings yet
- RFI 001 - Dual Closure of ShouldersDocument2 pagesRFI 001 - Dual Closure of ShouldersKc TanNo ratings yet
- 12 - Traffic & ParkingDocument9 pages12 - Traffic & ParkingsathishNo ratings yet
- IVAO - International Virtual Aviation Organization My AnswerDocument5 pagesIVAO - International Virtual Aviation Organization My AnswerThar Latt0% (1)
- Instrument Refresher CourseDocument24 pagesInstrument Refresher Courselauhom13No ratings yet
- Chapters 1 - 5Document143 pagesChapters 1 - 5Anjo SemaniaNo ratings yet
- The 2022 Guide To Number Coding in The Philippines AutodealDocument1 pageThe 2022 Guide To Number Coding in The Philippines AutodealjsraguilonNo ratings yet
- Singapore Guidelines For Tourists - DibyaDocument31 pagesSingapore Guidelines For Tourists - DibyaDibyadarshi GhoshNo ratings yet
- EASA Concept Drone Brochure WebDocument12 pagesEASA Concept Drone Brochure WebAdeva Rizky PutraNo ratings yet
- Jeppview For Windows: General Information General InformationDocument9 pagesJeppview For Windows: General Information General InformationCatalin CiocarlanNo ratings yet
- Listening CutDocument243 pagesListening Cutchinh nguyenNo ratings yet
- Pennsylvania: Financial Responsibilty Identification CardDocument2 pagesPennsylvania: Financial Responsibilty Identification CardDanna GarcesNo ratings yet
- SFC FormatDocument39 pagesSFC FormatAnil SuryawanshiNo ratings yet
- ADB Road Safety Audit GuidelinesDocument51 pagesADB Road Safety Audit GuidelinesRobert OrtizNo ratings yet
- SBSPSBSG PDF 1706224728Document17 pagesSBSPSBSG PDF 1706224728bielpwkNo ratings yet
- G & SR Corrected With AS-Eng - (Full) Up To 44Document528 pagesG & SR Corrected With AS-Eng - (Full) Up To 44punit sarswatNo ratings yet
- Traffic and Road Safety Act (Amendment) Bill, 2023Document4 pagesTraffic and Road Safety Act (Amendment) Bill, 2023Frank WadidiNo ratings yet
- Road Safety AuditDocument45 pagesRoad Safety AuditrNo ratings yet
- Dissertation R Transportation Problems in Metros and Urban CitiesDocument58 pagesDissertation R Transportation Problems in Metros and Urban CitiesSejuti SarkarNo ratings yet
- Study On Pedestrian Risk Exposure at Unsignalized Intersection in A Country With Extreme Vehicle Heterogeneity and Poor Lane DisciplineDocument10 pagesStudy On Pedestrian Risk Exposure at Unsignalized Intersection in A Country With Extreme Vehicle Heterogeneity and Poor Lane DisciplineABDIRAHMANNo ratings yet