You might also like
- Into The Wolfs MawDocument63 pagesInto The Wolfs MawAndrew Stansfield75% (4)
- Airports of The World - May-June 2020 PDFDocument86 pagesAirports of The World - May-June 2020 PDFV DNo ratings yet
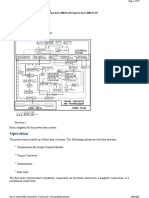
- 797B Power Train System OperationDocument29 pages797B Power Train System OperationneedNo ratings yet
- Engine Layout and Load EngineDocument26 pagesEngine Layout and Load EngineX SxUxGxAxR XNo ratings yet
- Plastics, A Material of Choice For The Automotive IndustryDocument12 pagesPlastics, A Material of Choice For The Automotive IndustryShailesh Kumar SinghNo ratings yet
- Freezing and Refrigerated Storage in Fisheries - 7. Cold StoresDocument17 pagesFreezing and Refrigerated Storage in Fisheries - 7. Cold StoresramoramoniNo ratings yet
- FM 1000 TsDocument2 pagesFM 1000 TsMAKRONNo ratings yet
- Keenahan Et Al RevisedDocument20 pagesKeenahan Et Al RevisedpcfrancoNo ratings yet
- Monitoring Bridge Dynamic Behaviour Using An Instrumented Two Axle Vehicle P.J. Mcgetrick, A. González & E.J.ObrienDocument8 pagesMonitoring Bridge Dynamic Behaviour Using An Instrumented Two Axle Vehicle P.J. Mcgetrick, A. González & E.J.ObrienArturo GonzalezNo ratings yet
- 2021 - EVACES - Tokyo - Fleet Monitoring - Using Sensors in A Fleet of Passing Vehicles To Monitory Health of BridgeDocument10 pages2021 - EVACES - Tokyo - Fleet Monitoring - Using Sensors in A Fleet of Passing Vehicles To Monitory Health of BridgeNqtmquin NtqmquinNo ratings yet
- Parameter Identification of Vehicles Movingon Continuous BridgesDocument21 pagesParameter Identification of Vehicles Movingon Continuous BridgesAugusto César Santos PeixotoNo ratings yet
- 代表性论著三(SCI论文)Document6 pages代表性论著三(SCI论文)ljt.jacky.leeNo ratings yet
- C162Allowingforarockingdatumintheanalysisofdrive Bybridgeinspections AssubDocument9 pagesC162Allowingforarockingdatumintheanalysisofdrive Bybridgeinspections AssubMirdamad Findy RizqyNo ratings yet
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDocument19 pagesUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloNo ratings yet
- tmpDD23 TMPDocument10 pagestmpDD23 TMPFrontiersNo ratings yet
- Evaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsDocument23 pagesEvaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsBridge&StructureNo ratings yet
- Investigation On Dynamical Interaction Between A Heavy Vehicle and Road PavementDocument23 pagesInvestigation On Dynamical Interaction Between A Heavy Vehicle and Road PavementCE21M031 M.SuryaNo ratings yet
- Development and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsDocument14 pagesDevelopment and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsEnyew MelesseNo ratings yet
- Physica A: Sheng Jin, Dianhai Wang, Pengfei Tao, Pingfan LiDocument9 pagesPhysica A: Sheng Jin, Dianhai Wang, Pengfei Tao, Pingfan Lijohncena3No ratings yet
- Research Article: A Data-Driven Approach For Bridge Weigh-in-Motion From Impact Acceleration Responses at Bridge JointsDocument14 pagesResearch Article: A Data-Driven Approach For Bridge Weigh-in-Motion From Impact Acceleration Responses at Bridge JointshromanvaNo ratings yet
- Transportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguDocument13 pagesTransportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguJulio CésarNo ratings yet
- Application of Empirical Mode Decomposition To Drive-By Bridge Damage DetectionDocument22 pagesApplication of Empirical Mode Decomposition To Drive-By Bridge Damage DetectionMehdi JalayeriNo ratings yet
- Influence of Some Vehicle and Track Parameters On The Environmental Vibrations Induced by Railway TrafficDocument22 pagesInfluence of Some Vehicle and Track Parameters On The Environmental Vibrations Induced by Railway TrafficMücahit AtalanNo ratings yet
- Pub 1854Document10 pagesPub 1854pcfrancoNo ratings yet
- Crosswind Effect Studies On Road Vehicle Passing by Bridge Tower Using Computational Fluid DynamicsDocument16 pagesCrosswind Effect Studies On Road Vehicle Passing by Bridge Tower Using Computational Fluid Dynamicsaqil ithninNo ratings yet
- 49 - Arman e Tampere - TRC-22-00969 - R1 - AcceptedDocument26 pages49 - Arman e Tampere - TRC-22-00969 - R1 - Acceptedalison.pereiraNo ratings yet
- Computers and Structures: Nan Zhang, He XiaDocument9 pagesComputers and Structures: Nan Zhang, He Xialeo2902No ratings yet
- TN Bri 2019RRT PDFDocument33 pagesTN Bri 2019RRT PDFSomeone HereNo ratings yet
- An Experimental Study On Lateral Acceleration of CDocument17 pagesAn Experimental Study On Lateral Acceleration of CSasaMiyaaaNo ratings yet
- Doumiati11 OnboardRealTimeEstimationofVehicleLateralTireRoad PDFDocument14 pagesDoumiati11 OnboardRealTimeEstimationofVehicleLateralTireRoad PDFDanielaSalas23No ratings yet
- Gap Acceptance Intersection Approach SpeDocument17 pagesGap Acceptance Intersection Approach Speprofeta1955No ratings yet
- A Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsDocument36 pagesA Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsManjunatha EikilaNo ratings yet
- A Parametric Study of Traffic Load Effects in Medium Span BridgesDocument13 pagesA Parametric Study of Traffic Load Effects in Medium Span BridgesKhalilNo ratings yet
- Journal Pone 0282779Document21 pagesJournal Pone 0282779maduhu.botswanaNo ratings yet
- Accuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolDocument5 pagesAccuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolNGUYEN MANHNo ratings yet
- Two-Lane Traffic Simulations With A Blockage Induced by An Accident CarDocument8 pagesTwo-Lane Traffic Simulations With A Blockage Induced by An Accident CarAnatta OngNo ratings yet
- Applied Sciences: Evaluating The E Track Performance in High-Speed Railway Systems Using Co-Simulation AnalysisDocument17 pagesApplied Sciences: Evaluating The E Track Performance in High-Speed Railway Systems Using Co-Simulation AnalysisДенис НедоступовNo ratings yet
- Effect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicDocument14 pagesEffect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicRajaSekhararayudu SanaNo ratings yet
- VANET Connectivity Analysis: Mohamed Kafsi, Panos Papadimitratos, Olivier Dousse, Tansu Alpcan, Jean-Pierre HubauxDocument10 pagesVANET Connectivity Analysis: Mohamed Kafsi, Panos Papadimitratos, Olivier Dousse, Tansu Alpcan, Jean-Pierre HubauxThiruChNo ratings yet
- Transportation and Traffic TheoryDocument21 pagesTransportation and Traffic TheorysaobracajniNo ratings yet
- Literature Review of Road Safety at Traffic Signals and Signalised CrossingsDocument6 pagesLiterature Review of Road Safety at Traffic Signals and Signalised Crossingsgw0gbrweNo ratings yet
- Ict Ut2015 Long (Vie)Document13 pagesIct Ut2015 Long (Vie)Xuan LongNo ratings yet
- Turner1988 PDFDocument12 pagesTurner1988 PDFGerTranNo ratings yet
- Safety of Raised Pavement Markers in Freeway Tunnels Based On Driving Behavior - Xialhua Zhao, Yunjie Ju, Haijian Li, Changfen Zhang, Jianming Ma.Document15 pagesSafety of Raised Pavement Markers in Freeway Tunnels Based On Driving Behavior - Xialhua Zhao, Yunjie Ju, Haijian Li, Changfen Zhang, Jianming Ma.TEOH ENG TAT / UPMNo ratings yet
- Estimation of Average Space Headway Under Heterogeneous Traffic ConditionsDocument5 pagesEstimation of Average Space Headway Under Heterogeneous Traffic Conditionsangelica butonNo ratings yet
- Advpub 16-00498Document13 pagesAdvpub 16-00498Aan HunaifiNo ratings yet
- Identifying Cracks in A Beam Using The Wavelet Transform of Vehicle AccelerationsDocument41 pagesIdentifying Cracks in A Beam Using The Wavelet Transform of Vehicle AccelerationsKenneth KnoxNo ratings yet
- Traffic Queueing Jockey Simulation Dictation Model On Horizontal Curves Using Generative Adversarial NetworksDocument17 pagesTraffic Queueing Jockey Simulation Dictation Model On Horizontal Curves Using Generative Adversarial NetworksAnyin PeterNo ratings yet
- IRJET Traffic Flow Characteristics On THDocument4 pagesIRJET Traffic Flow Characteristics On THmehul da aviatorNo ratings yet
- Perspectives On Railway Track Geometry Condition Monitoring From in Service Railway VehiclesDocument30 pagesPerspectives On Railway Track Geometry Condition Monitoring From in Service Railway VehiclesDanteNo ratings yet
- Jot1011 PDFDocument94 pagesJot1011 PDFHarry NovfriandiNo ratings yet
- Effect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsDocument8 pagesEffect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsasdNo ratings yet
- 代表性论著一(SCI论文)Document8 pages代表性论著一(SCI论文)ljt.jacky.leeNo ratings yet
- Cross: Mechanical Systems and Signal ProcessingDocument18 pagesCross: Mechanical Systems and Signal ProcessingMohammed TouatiNo ratings yet
- Comparison FWD BenkelmanDocument7 pagesComparison FWD BenkelmanAdi ChaktiNo ratings yet
- Deng 2020Document38 pagesDeng 2020osmar ivanNo ratings yet
- Evaluating The Impact of Free Left Turns On Traffic Behavior at SignalizedDocument15 pagesEvaluating The Impact of Free Left Turns On Traffic Behavior at SignalizedMeenu TomsonNo ratings yet
- NDT For Safety (Train Parts)Document12 pagesNDT For Safety (Train Parts)Boy George's ParadiseNo ratings yet
- JCIE - Vehicle Load - 2004Document11 pagesJCIE - Vehicle Load - 2004Jorge Friné Ramos VargasNo ratings yet
- Mathematical Traffic Load Modelling andDocument38 pagesMathematical Traffic Load Modelling andKhalilNo ratings yet
- Advances in Structural EngineeringDocument12 pagesAdvances in Structural EngineeringSeoyoon JoenNo ratings yet
- Analysis of Dynamic Response of Three-Span Bridge Using Vehicle Load Data From Road Administration Department IV in VietnamDocument10 pagesAnalysis of Dynamic Response of Three-Span Bridge Using Vehicle Load Data From Road Administration Department IV in VietnamMr PolashNo ratings yet
- Mobil TRR 2007Document9 pagesMobil TRR 2007Laura ČupićNo ratings yet
- Vehicle Dynamics ManuscriptDocument9 pagesVehicle Dynamics Manuscriptaditya bhandakkarNo ratings yet
- Simplified and Relatively Precise Back-Calculation Method For The Pavement Excitation of The MonorailDocument19 pagesSimplified and Relatively Precise Back-Calculation Method For The Pavement Excitation of The MonorailRishikesh GunjalNo ratings yet
- Accident Analysis and Prevention: Zhuanglin Ma, Honglu Zhang, Steven I-Jy Chien, Jin Wang, Chunjiao DongDocument9 pagesAccident Analysis and Prevention: Zhuanglin Ma, Honglu Zhang, Steven I-Jy Chien, Jin Wang, Chunjiao DongSmith SongkhlaNo ratings yet
- Of The City: TransportationDocument4 pagesOf The City: TransportationRabindranath TagoreNo ratings yet
- OPNAV 3120.32C, Standard Organization and Regulations Manual of The U.S. NavyDocument23 pagesOPNAV 3120.32C, Standard Organization and Regulations Manual of The U.S. NavyLaurenz LaurenteNo ratings yet
- Ethics AssignmentDocument4 pagesEthics AssignmentRaviNo ratings yet
- Anexo Actividades 4Document23 pagesAnexo Actividades 4MARCELGENIONo ratings yet
- Test Paper English Grade 6Document3 pagesTest Paper English Grade 6Michelle Boclaras LapazNo ratings yet
- Department Orders SummaryDocument15 pagesDepartment Orders SummaryLowie Torres TonioNo ratings yet
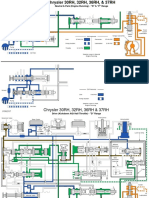
- 30RH - 32RH - 36RH e 37RHDocument10 pages30RH - 32RH - 36RH e 37RHFabricio LimaNo ratings yet
- Drawing Register TemplateDocument1 pageDrawing Register TemplateHanamanthNo ratings yet
- Assignment 2,3Document4 pagesAssignment 2,3Noor El AbedNo ratings yet
- Attendee MGF23 Logistics BrochureDocument7 pagesAttendee MGF23 Logistics BrochurejadouxNo ratings yet
- Ferry Crash Ruling Iris Weinshall (Chuck Schumer's Wife)Document10 pagesFerry Crash Ruling Iris Weinshall (Chuck Schumer's Wife)Syndicated NewsNo ratings yet
- BailmentDocument5 pagesBailmentRajeevNo ratings yet
- Types of Compressors: Group Members: - Salman Abid - Usman Mustafa - Rashid Rehman - Adnan AfzalDocument30 pagesTypes of Compressors: Group Members: - Salman Abid - Usman Mustafa - Rashid Rehman - Adnan AfzalRam Kumar SinghNo ratings yet
- BOL Metalman, Claster, Sansidin, Hotshot - 2 - 2 PDFDocument1 pageBOL Metalman, Claster, Sansidin, Hotshot - 2 - 2 PDFAbdullah LimonNo ratings yet
- Atr D 1-21 EnglDocument6 pagesAtr D 1-21 EnglFernando Enrique Lobo SierraNo ratings yet
- Eagles SoarDocument2 pagesEagles SoarSimon SazNo ratings yet
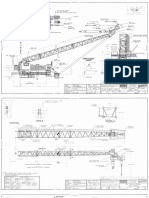
- WHP CraneDocument15 pagesWHP CraneFred Eldian ElloNo ratings yet
- Mr. HARING BelandaDocument49 pagesMr. HARING BelandaWahyu AnggoroNo ratings yet
- Iffco Tokio Proposal Form MTO Mandatory DetailsDocument1 pageIffco Tokio Proposal Form MTO Mandatory DetailsvaibhavNo ratings yet
- Airborne Wind Energy SystemsDocument20 pagesAirborne Wind Energy SystemsKonney NaveenNo ratings yet
- Study Report On Maruthi SuzukiDocument15 pagesStudy Report On Maruthi Suzukivinaykrissh100% (1)
- HYdra ResponseDocument9 pagesHYdra Responsesandeepkumar2311No ratings yet
- ???Document8 pages???Sheilla Ayu RahmadaniNo ratings yet