You might also like
- Peter A. Levine - Waking The Tiger - Healing Trauma - The Innate Capacity To Transform Overwhelming Experiences - 1997 - OCRDocument193 pagesPeter A. Levine - Waking The Tiger - Healing Trauma - The Innate Capacity To Transform Overwhelming Experiences - 1997 - OCRNeelakanta Kalla96% (55)
- Assimil Brazilian Portuguese (Portuguese Edition)Document15 pagesAssimil Brazilian Portuguese (Portuguese Edition)robertocarmur43% (23)
- Fold N Slide Hardware BrochureDocument52 pagesFold N Slide Hardware Brochurecavgsi16vNo ratings yet
- Mathematics ProjectDocument18 pagesMathematics ProjectRugmini Ammal50% (2)
- PTV Vissim - First Steps ENG PDFDocument34 pagesPTV Vissim - First Steps ENG PDFBeby RizcovaNo ratings yet
- Project PDFDocument38 pagesProject PDFSaravana Sankar68% (19)
- University of Tennessee Religious ExemptionDocument3 pagesUniversity of Tennessee Religious ExemptionDonnaNo ratings yet
- An Introduction To Buddhist PsychologyDocument14 pagesAn Introduction To Buddhist PsychologyPemarathanaHapathgamuwa100% (4)
- UF6 ManualDocument24 pagesUF6 ManualPhil Ruby Tigers0% (1)
- Micro TeachingDocument6 pagesMicro TeachingNirmaladevi SubramaniamNo ratings yet
- SAMIR BARAL MATH PROJECT DocumentDocument10 pagesSAMIR BARAL MATH PROJECT Documentaaryan khanalNo ratings yet
- Applied Mathematics, Eng Lessons 5& 6Document5 pagesApplied Mathematics, Eng Lessons 5& 6tenisonngwaNo ratings yet
- AXXXCDocument9 pagesAXXXCAshwin MinzNo ratings yet
- Assighnmebt 1 SolDocument6 pagesAssighnmebt 1 SolAyesha KhanNo ratings yet
- Diffirential Equation PDFDocument8 pagesDiffirential Equation PDFBhavik ChaudhariNo ratings yet
- Ministry of High Education University of Zakho Faculty of Seience Department of MathematicDocument11 pagesMinistry of High Education University of Zakho Faculty of Seience Department of MathematicWisal muhammedNo ratings yet
- Engineering Mathematics Term Paper ReviewDocument18 pagesEngineering Mathematics Term Paper Reviewvt5922No ratings yet
- Unit II DELADocument4 pagesUnit II DELAsonyvakode648No ratings yet
- M1 - Intro To DE 8 9 PDFDocument8 pagesM1 - Intro To DE 8 9 PDFsubyNo ratings yet
- Differential EquationsDocument4 pagesDifferential Equationssandhya ganesanNo ratings yet
- Computational Method Problem NewDocument37 pagesComputational Method Problem NewBhavesh PatelNo ratings yet
- Simultaneous EquationDocument10 pagesSimultaneous EquationsabbysamuraNo ratings yet
- Polytechnic University of The Philippines: Title: Introduction To Differential EquationsDocument7 pagesPolytechnic University of The Philippines: Title: Introduction To Differential EquationsCyrus RiveraNo ratings yet
- Differential Equations (WORD)Document5 pagesDifferential Equations (WORD)Veegay Torres KibeteNo ratings yet
- Introduction To Differential Equations: Order of A Differential EquationDocument4 pagesIntroduction To Differential Equations: Order of A Differential EquationSeif Aldin KhamisNo ratings yet
- Unit 1Document20 pagesUnit 1Tutul BiswasNo ratings yet
- About EulerDocument10 pagesAbout Eulerbethel lemmaNo ratings yet
- Partial Differential EquationsDocument44 pagesPartial Differential Equationspashish77No ratings yet
- 09 - ODE - 01 - Ordinary Difference EquationDocument7 pages09 - ODE - 01 - Ordinary Difference EquationSalam Daeng BengoNo ratings yet
- Calculus Assignment FinalDocument16 pagesCalculus Assignment FinalYared DemissieNo ratings yet
- Differential Equations: John POL T. Igagamao, CEDocument18 pagesDifferential Equations: John POL T. Igagamao, CEKirstine Mae GilbuenaNo ratings yet
- Map2302 Lecture 1 2011-3: The Lotka-Volterra Predator-Prey EquationsDocument18 pagesMap2302 Lecture 1 2011-3: The Lotka-Volterra Predator-Prey EquationsChristian SarmientoNo ratings yet
- Introduction To DifferentiationDocument4 pagesIntroduction To DifferentiationShan MajeedNo ratings yet
- Sir Waqas SB PDFDocument106 pagesSir Waqas SB PDFRAMZAN AFZALNo ratings yet
- N S O D E: Umerical Olution OF Rdinary Ifferential QuationsDocument3 pagesN S O D E: Umerical Olution OF Rdinary Ifferential QuationsAyush BhadauriaNo ratings yet
- Differential EquationsDocument17 pagesDifferential EquationsNikolai VillegasNo ratings yet
- Differential EquationsDocument11 pagesDifferential EquationsMD AMINUL ISLAMNo ratings yet
- Review of Ordinary Differential EquationsDocument18 pagesReview of Ordinary Differential EquationsbbteenagerNo ratings yet
- S10 Prodigies PPTDocument33 pagesS10 Prodigies PPTKrish GuptaNo ratings yet
- Ordinary Differential Equation: BackgroundDocument3 pagesOrdinary Differential Equation: BackgroundMohamed AbdiNo ratings yet
- OdeDocument36 pagesOdeSyed M AdnanNo ratings yet
- ODEs 2024Document18 pagesODEs 2024Ahtasham ArshadNo ratings yet
- HOLDEDocument12 pagesHOLDEArvin James DagtaNo ratings yet
- Engineering AnalysisDocument11 pagesEngineering AnalysisMhamedNo ratings yet
- Linear Differential Equation - Wikipedia, The Free EncyclopediaDocument8 pagesLinear Differential Equation - Wikipedia, The Free EncyclopediaZaw Moe Khine100% (1)
- Applications - Diffrnt EqnsDocument10 pagesApplications - Diffrnt Eqnsroshan rojerNo ratings yet
- Introduction To Boundary Value Problems E-NoteDocument6 pagesIntroduction To Boundary Value Problems E-NotexingmingNo ratings yet
- Linear EquationDocument8 pagesLinear EquationkleyrgNo ratings yet
- Nonl MechDocument59 pagesNonl MechDelila Rahmanovic DemirovicNo ratings yet
- Business MathematicsDocument12 pagesBusiness MathematicsVineet PrajapatiNo ratings yet
- Linear Equations: Unit 14 AND Euclidean SpacesDocument24 pagesLinear Equations: Unit 14 AND Euclidean SpacesRiddhima MukherjeeNo ratings yet
- Difference EquationsDocument47 pagesDifference EquationsNawal KishoreNo ratings yet
- De Lecture Notes4Document22 pagesDe Lecture Notes4Lory Liza Bulay-ogNo ratings yet
- Diff Eq NotesDocument87 pagesDiff Eq NotesMin Jae ParkNo ratings yet
- Algebraic EquationsDocument7 pagesAlgebraic Equationsapi-126876773No ratings yet
- Mal 514Document171 pagesMal 514darelibranNo ratings yet
- Ordinary Differential EquationDocument15 pagesOrdinary Differential EquationAli Asad SahuNo ratings yet
- MathsDocument6 pagesMathsdareludumNo ratings yet
- Systems of Equations ConceptDocument8 pagesSystems of Equations Conceptapi-126876773No ratings yet
- Differentiation of Algebraic Functions (1)Document17 pagesDifferentiation of Algebraic Functions (1)Jayjo SegundoNo ratings yet
- 5 1532157023 - 21-07-2018 PDFDocument8 pages5 1532157023 - 21-07-2018 PDFRahul SharmaNo ratings yet
- De - Chapter 1Document7 pagesDe - Chapter 1May Ann AceraNo ratings yet
- D EquationDocument13 pagesD EquationsubyNo ratings yet
- 2 MarksDocument6 pages2 Markssrsr1987No ratings yet
- Solution of First Order Linear Differential EquationDocument4 pagesSolution of First Order Linear Differential EquationnishagoyalNo ratings yet
- Elgenfunction Expansions Associated with Second Order Differential EquationsFrom EverandElgenfunction Expansions Associated with Second Order Differential EquationsNo ratings yet
- HET Neoclassical School, MarshallDocument26 pagesHET Neoclassical School, MarshallDogusNo ratings yet
- Passenger Elevator Operation ManualDocument24 pagesPassenger Elevator Operation ManualJahn Ray B. Lanozo100% (1)
- 832Document40 pages832B. MerkurNo ratings yet
- DLP L05 - Challenges in AdolescenceDocument3 pagesDLP L05 - Challenges in AdolescenceSora YamazakiNo ratings yet
- Module 2 Tssig Week 2 3Document4 pagesModule 2 Tssig Week 2 3Alysa QuintanarNo ratings yet
- Teaching Listening and Speaking in Second and Foreign Language Contexts (Kathleen M. Bailey)Document226 pagesTeaching Listening and Speaking in Second and Foreign Language Contexts (Kathleen M. Bailey)iamhsuv100% (1)
- Addicted1 - The Inquietude of YouthDocument867 pagesAddicted1 - The Inquietude of YouthIlsa Krisdwiyani100% (1)
- Unidad 1 - Paco (Tema 3 - Paco Is Wearing A New Suit) PDFDocument24 pagesUnidad 1 - Paco (Tema 3 - Paco Is Wearing A New Suit) PDFpedropruebaNo ratings yet
- 1270A544-032 Console v3.1Document304 pages1270A544-032 Console v3.1badr eddine100% (1)
- Wuolah Free Use of EnglishDocument20 pagesWuolah Free Use of EnglishCristina CórcolesNo ratings yet
- Crocheted Fish PDFDocument10 pagesCrocheted Fish PDFAleyda Bonfil LeónNo ratings yet
- Timely Hints OctoberDocument5 pagesTimely Hints OctoberDane McDonaldNo ratings yet
- Lesson: Identifying Author's Bias For or Against: Quarter 3 Wk-1Document4 pagesLesson: Identifying Author's Bias For or Against: Quarter 3 Wk-1Mary Cris Navarro LiboonNo ratings yet
- STPM Trial 2012 Physics Qa Pahang PDFDocument51 pagesSTPM Trial 2012 Physics Qa Pahang PDFMusicStereo CoolNo ratings yet
- Kitimat JRP SummaryDocument17 pagesKitimat JRP SummaryNorthwest InstituteNo ratings yet
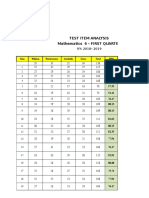
- Test Item Analysis Mathematics 6 - FIRST QUARTER: Item Wisdom Perseverance Gratitude Grace Total MPSDocument6 pagesTest Item Analysis Mathematics 6 - FIRST QUARTER: Item Wisdom Perseverance Gratitude Grace Total MPSQUISA O. LAONo ratings yet
- ABLSDocument86 pagesABLSRenée Alejandra100% (2)
- PointgroupsDocument13 pagesPointgroupsT alameluNo ratings yet
- Antenna Mini ProjectDocument65 pagesAntenna Mini ProjectHassan MehsenNo ratings yet
- Analogy - 10 Page - 01 PDFDocument10 pagesAnalogy - 10 Page - 01 PDFrifathasan13No ratings yet
- CSS 11 - Q1 DIAGNOSTIC TEST - No AnswerDocument4 pagesCSS 11 - Q1 DIAGNOSTIC TEST - No AnswerJanelkris PlazaNo ratings yet
- HW - Module 1 & 2 Exercise Questions To Be SolvedDocument7 pagesHW - Module 1 & 2 Exercise Questions To Be Solvedjaryal.sarthak.jaryalNo ratings yet