You might also like
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Gear Measurement and Basic ConceptsDocument34 pagesGear Measurement and Basic Conceptskajavarun100% (1)
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- Design & Analysis of Worm & Worm GearDocument32 pagesDesign & Analysis of Worm & Worm Gearshahzadali0786100% (1)
- Power Transmission PDFDocument89 pagesPower Transmission PDFKumar Rajesh85% (54)
- AGMA390-03 Gear Measurement MetodesDocument69 pagesAGMA390-03 Gear Measurement MetodesAdrian Ropero100% (2)
- Power Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsDocument26 pagesPower Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsNirav PanchalNo ratings yet
- Gear TrainDocument26 pagesGear Trainraaz1007No ratings yet
- Mbeya University of Science and TechnologyDocument37 pagesMbeya University of Science and TechnologySadikiel100% (1)
- Power Transmission: Rotational PulleyDocument19 pagesPower Transmission: Rotational PulleyQim SvNo ratings yet
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwNo ratings yet
- Introduction To GearsDocument28 pagesIntroduction To Gearssandeep_gaikwad2100% (4)
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- Iso 4759Document63 pagesIso 4759NatashaAggarwal50% (2)
- ME0403 Ch2 Gear MeasurementDocument42 pagesME0403 Ch2 Gear MeasurementMANOJ M100% (1)
- Gears, Types and ItsDocument22 pagesGears, Types and ItsBravo VermaNo ratings yet
- Noncircular GearsDocument6 pagesNoncircular GearsRăzvan NicolaeNo ratings yet
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingFrom EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingNo ratings yet
- Introduction To GearsDocument30 pagesIntroduction To GearsPrakash Joshi100% (5)
- DEXT 085 DIN 928 Porca Solda QuadradaDocument10 pagesDEXT 085 DIN 928 Porca Solda Quadradatestesada100% (2)
- Gears and Gear Drives!!Document55 pagesGears and Gear Drives!!Ishank Singh SandhuNo ratings yet
- Gear Trains Simple PDFDocument43 pagesGear Trains Simple PDFYuvaraj GNo ratings yet
- L Gear TrainsDocument88 pagesL Gear TrainsAditya Shubham Garg100% (1)
- ZF Ecomid - 9S109 (1304 051 445) - Hino FM2PDocument52 pagesZF Ecomid - 9S109 (1304 051 445) - Hino FM2PDian Sikumbang100% (4)
- Gear CuttingDocument56 pagesGear Cuttingiyerrahul2679350% (2)
- Power Transmission PDFDocument89 pagesPower Transmission PDFShubhang Charantimath50% (2)
- GEARSDocument25 pagesGEARSamitNo ratings yet
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsFrom EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsRating: 4 out of 5 stars4/5 (1)
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- Power Transmission DevicesDocument57 pagesPower Transmission DevicesRahul PrajapatiNo ratings yet
- Group 3 Design of Helical Gear. (Autosaved)Document27 pagesGroup 3 Design of Helical Gear. (Autosaved)Absë Thè Hêro'sNo ratings yet
- Bme - Part 2Document44 pagesBme - Part 2Sumanth ChallaNo ratings yet
- Chapter 3 - Machine Tool DrivesDocument112 pagesChapter 3 - Machine Tool Drivesaman muleNo ratings yet
- Lab 1Document8 pagesLab 1Mansoob BukhariNo ratings yet
- CHP 3 Power Transmission GEARSDocument18 pagesCHP 3 Power Transmission GEARSabinmwangiNo ratings yet
- Chapter 4 Part 1Document37 pagesChapter 4 Part 1Izzat FakhriNo ratings yet
- Chapter 4 Design of Power Transmission ElementsDocument43 pagesChapter 4 Design of Power Transmission ElementsMuhamad Arif100% (2)
- Lecture Design of Spur GearDocument97 pagesLecture Design of Spur GearOwais Ahmad KhanNo ratings yet
- Design of Transmission System Unit IIIDocument57 pagesDesign of Transmission System Unit IIIRaj MohanNo ratings yet
- GearDocument19 pagesGearArul DossNo ratings yet
- Gears - in - MEC - 403 (Theory of Machines-I)Document12 pagesGears - in - MEC - 403 (Theory of Machines-I)Giyeong EomNo ratings yet
- Gearbox 210509074427Document59 pagesGearbox 210509074427mussietilahungessesseNo ratings yet
- Gears For Parallel ShaftsDocument25 pagesGears For Parallel ShaftsGangaraju MoopuriNo ratings yet
- Screenshot 2023-05-09 at 11.38.39 AMDocument26 pagesScreenshot 2023-05-09 at 11.38.39 AMishuhaiq7No ratings yet
- Gear & Gear Trains: See The Background of Slide.... !!! For Pre-Info About Journey We Are About To BeginDocument27 pagesGear & Gear Trains: See The Background of Slide.... !!! For Pre-Info About Journey We Are About To BeginHaasen HillNo ratings yet
- Subject - Machine Design - : Topic - Worm GearsDocument28 pagesSubject - Machine Design - : Topic - Worm GearsRohit GhulanavarNo ratings yet
- TransmissionsDocument10 pagesTransmissionssreeramNo ratings yet
- Djj5133 Engineering Design Case Study 2 Lecturer Name: Mohd Fuaad Bin Fesul Name:Muhammad Haziq Hidayat Bin Rahim MATRIX NO: 23DKM18F2029Document44 pagesDjj5133 Engineering Design Case Study 2 Lecturer Name: Mohd Fuaad Bin Fesul Name:Muhammad Haziq Hidayat Bin Rahim MATRIX NO: 23DKM18F2029Kubheran SelvathuraiNo ratings yet
- Unit - 4Document85 pagesUnit - 4Shriparno deyNo ratings yet
- Design and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysDocument10 pagesDesign and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysankNo ratings yet
- Type of Gears Trains and The Methods To Find Train ValueDocument14 pagesType of Gears Trains and The Methods To Find Train Valueabbas bilalNo ratings yet
- DMM - 2 R19 - UNIT-4 (Ref-2)Document39 pagesDMM - 2 R19 - UNIT-4 (Ref-2)PavaniNo ratings yet
- Helical Gears: DefinitionDocument29 pagesHelical Gears: DefinitionMuthuvel MNo ratings yet
- ChainDocument29 pagesChainzakibrant23No ratings yet
- DME AllDocument36 pagesDME AllBashu Dev SanjelNo ratings yet
- Tutorial 3 Josephine Bakewa IDDocument10 pagesTutorial 3 Josephine Bakewa IDJosephine BakewaNo ratings yet
- 881 Final T2Document22 pages881 Final T2Ankit BurnwalNo ratings yet
- 3 Power Transmission JJ615Document27 pages3 Power Transmission JJ615afiqzeroNo ratings yet
- Gearboxashu1 150911200033 Lva1 App6891Document80 pagesGearboxashu1 150911200033 Lva1 App6891Jojee MarieNo ratings yet
- ME324 Lecture5Document66 pagesME324 Lecture5Jam Maica TuboNo ratings yet
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.From EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.No ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- LS0714 PBDocument6 pagesLS0714 PBDerek FrostNo ratings yet
- Scew Thread IndexDocument3 pagesScew Thread IndexRyszardZNo ratings yet
- Gear Formulae - Engineers EdgeDocument2 pagesGear Formulae - Engineers EdgePawankumar PagoteNo ratings yet
- Fasteners PDFDocument42 pagesFasteners PDFPaco LMNo ratings yet
- Juk LH-1152Document32 pagesJuk LH-1152RHoskaNo ratings yet
- Rothoblaas - Hbs .Declaration of Performance - enDocument5 pagesRothoblaas - Hbs .Declaration of Performance - enAndrei GheorghicaNo ratings yet
- Screw Jack TutorialDocument16 pagesScrew Jack TutorialHareesha N GNo ratings yet
- Experiemnt 4 Screw JackDocument13 pagesExperiemnt 4 Screw JackMansoob BukhariNo ratings yet
- Acme Screw AssembliesDocument51 pagesAcme Screw Assemblies1940LaSalleNo ratings yet
- PB 2012NBDocument6 pagesPB 2012NBBruno PilieciNo ratings yet
- American Electrical HeycoAgro Cross ReferenceDocument2 pagesAmerican Electrical HeycoAgro Cross ReferenceSreegith ChelattNo ratings yet
- LC300A-V3 LakshmiDocument177 pagesLC300A-V3 LakshmiMODERN ACRYLICS PVT. LTD.No ratings yet
- Linde Service GuideDocument4 pagesLinde Service GuideMário AndradeNo ratings yet
- Metric Thread - Extended Thread Size RangeDocument19 pagesMetric Thread - Extended Thread Size Rangemehmet ustunNo ratings yet
- Bolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorDocument3 pagesBolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorGeraldVirgilioAcusaNo ratings yet
- Bolens G12Document16 pagesBolens G12Samantha ChapmanNo ratings yet
- High Tensile BoltsDocument5 pagesHigh Tensile BoltssteelfaceNo ratings yet
- Gears NotesDocument33 pagesGears NotesSumanth KoyilakondaNo ratings yet
- SHIMANO ULTEGRA Front Derailleur FD-6600Document1 pageSHIMANO ULTEGRA Front Derailleur FD-6600jack87hornistNo ratings yet
- Dynamics: Direct Contact MechanismsDocument45 pagesDynamics: Direct Contact MechanismsJorge RobertoNo ratings yet
- HR4002Document4 pagesHR4002Eduardo BritoNo ratings yet
- Filtros Dimensiones EquivalenciasDocument182 pagesFiltros Dimensiones EquivalenciasClaudio100% (1)
- Is 1363-Bolts and NutsDocument12 pagesIs 1363-Bolts and NutsKushal PanchalNo ratings yet
- 2016Document3 pages2016Anibal QuezadaNo ratings yet
- 12.. Lobo Service ManualDocument50 pages12.. Lobo Service ManualRusonegroNo ratings yet
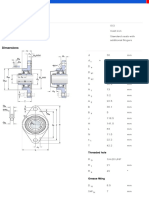
- Ball Bearing Oval Flanged units-FYTB 30 TFDocument2 pagesBall Bearing Oval Flanged units-FYTB 30 TFCosmin ManoleNo ratings yet