You might also like
- CIS Oracle Linux 7 Benchmark v3.0.0Document530 pagesCIS Oracle Linux 7 Benchmark v3.0.0Julio Andres PerezNo ratings yet
- Command InjectionDocument9 pagesCommand InjectionlimingNo ratings yet
- Exam Rhel 9Document12 pagesExam Rhel 9Qammar AbbasNo ratings yet
- Introduction To Deadlock: Difference Between Starvation and DeadlockDocument12 pagesIntroduction To Deadlock: Difference Between Starvation and DeadlockHappy SadNo ratings yet
- Part 1.1 Unit V Interrupts and DmaDocument13 pagesPart 1.1 Unit V Interrupts and DmaAishwarya RajeshNo ratings yet
- Device Drivers For Interrupt Handling: 19.1 DefinitionDocument6 pagesDevice Drivers For Interrupt Handling: 19.1 DefinitionSoundarya SvsNo ratings yet
- 10-Module 2 - System Call, Interrupts, Components of OS-29!04!2023Document12 pages10-Module 2 - System Call, Interrupts, Components of OS-29!04!2023Betha Sai Dheeraj 21BCE3046No ratings yet
- OS ComponentsDocument12 pagesOS ComponentsLinda BrownNo ratings yet
- Unit - 3 Embedded Firmware DesignDocument29 pagesUnit - 3 Embedded Firmware DesignMurali Dhara Sesha Giri Rao GoddantiNo ratings yet
- InterruptsDocument27 pagesInterruptsanayaNo ratings yet
- Module 1 - Operating-System ServicesDocument78 pagesModule 1 - Operating-System ServicesKailashNo ratings yet
- 13 InteruptsDocument5 pages13 InteruptsUditNo ratings yet
- DAT1 Ans KeyDocument4 pagesDAT1 Ans KeysumarysammanaNo ratings yet
- ARM Exception Handling and Software Interrupts (SWI) : Introduction To Embedded SystemsDocument19 pagesARM Exception Handling and Software Interrupts (SWI) : Introduction To Embedded SystemsKundan PatilNo ratings yet
- Interrupts Interrupts: GoalsDocument8 pagesInterrupts Interrupts: GoalsSreekanth PagadapalliNo ratings yet
- Slides 1Document20 pagesSlides 1Muhammad yousufNo ratings yet
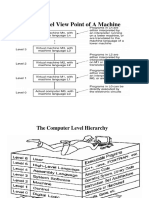
- Multilevel View Point of A MachineDocument14 pagesMultilevel View Point of A MachineMitu SehgalNo ratings yet
- Interrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16Document38 pagesInterrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16robNo ratings yet
- I O TechniquesDocument2 pagesI O TechniquesAbdul Wahab MulkNo ratings yet
- TERM Paper B51Document13 pagesTERM Paper B51vikasshalluNo ratings yet
- Unit 5 ErtosDocument28 pagesUnit 5 ErtosAbhi VarmaNo ratings yet
- 03 BusesDocument14 pages03 BusesLoli LolitaNo ratings yet
- Interrupts PDFDocument8 pagesInterrupts PDFFarhan SamsuddinNo ratings yet
- Operating System Module 5-Lecture 8: I/O HardwareDocument10 pagesOperating System Module 5-Lecture 8: I/O HardwareBiswas LecturesNo ratings yet
- Computer System OrganizationDocument61 pagesComputer System OrganizationRonald DomingoNo ratings yet
- 08 - NvicDocument29 pages08 - NvicSeif Al-dein AhmedNo ratings yet
- Architectural Support For Operating SystemsDocument57 pagesArchitectural Support For Operating SystemsarreyNo ratings yet
- Unit 3Document15 pagesUnit 3SIT127- TIWARI KUNALNo ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- STW120CT Computer Architecture and Networks: (Instruction Pipelining)Document24 pagesSTW120CT Computer Architecture and Networks: (Instruction Pipelining)BJ AcharyaNo ratings yet
- chp4 IO ManagementDocument49 pageschp4 IO ManagementHackeyNo ratings yet
- Lecture 02 - Embedded Software DevelopmentDocument25 pagesLecture 02 - Embedded Software DevelopmentNguyễn Tấn ĐịnhNo ratings yet
- William Stallings Computer Organization and Architecture 8 EditionDocument52 pagesWilliam Stallings Computer Organization and Architecture 8 EditionabbasNo ratings yet
- Exceptional Control FlowDocument45 pagesExceptional Control Flowabdulkerimaragaw936No ratings yet
- Debugging ToolsDocument10 pagesDebugging ToolsSoundarya SvsNo ratings yet
- Computer-System Structure: DR Ir S S Msanjila Dr. Ir. S. S. MsanjilaDocument21 pagesComputer-System Structure: DR Ir S S Msanjila Dr. Ir. S. S. MsanjilaJacob MwaipopoNo ratings yet
- Operating System: Introduction To Operating SystemsDocument20 pagesOperating System: Introduction To Operating SystemsAmit MishraNo ratings yet
- Multilevel View Point of A MachineDocument15 pagesMultilevel View Point of A MachineMitu SehgalNo ratings yet
- Embedded System Software TerminologiesDocument20 pagesEmbedded System Software TerminologiesDhananjay NemadeNo ratings yet
- Unit 1Document47 pagesUnit 1Mandeep SinghNo ratings yet
- Architecture of Device I/O DriversDocument41 pagesArchitecture of Device I/O DriversshivaspyNo ratings yet
- Outline of Introduction: ObjectivesDocument14 pagesOutline of Introduction: ObjectivesresybabyNo ratings yet
- Lecture Notes On Operating SystemsDocument27 pagesLecture Notes On Operating SystemsAdnan IrshadNo ratings yet
- Operating SystemDocument174 pagesOperating SystemHarshini BabyNo ratings yet
- 1-Introduction To Operating SystemDocument21 pages1-Introduction To Operating SystemTawki BakiNo ratings yet
- Operating System: Lecturer Ameer Sameer Hamood University of BabylonDocument33 pagesOperating System: Lecturer Ameer Sameer Hamood University of BabylonMohsen AljazaeryNo ratings yet
- Operating System: Week 2 - Computer System OrgDocument12 pagesOperating System: Week 2 - Computer System Orgbagas satriaNo ratings yet
- More Notes On ESDocument25 pagesMore Notes On EScharles kiarieNo ratings yet
- Computer Operation and Computing EnviromentsDocument35 pagesComputer Operation and Computing EnviromentssamNo ratings yet
- Real Time Computing and Programming - IntroDocument19 pagesReal Time Computing and Programming - IntroNon ArtistsNo ratings yet
- Interrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasDocument67 pagesInterrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasprashantvlsiNo ratings yet
- Elements of Computer Engineering Online ClassDocument46 pagesElements of Computer Engineering Online ClassPRABHAKAR K100% (1)
- Device DriversDocument31 pagesDevice DriversVijay KrishnaNo ratings yet
- InterruptDocument13 pagesInterruptاسيا عكاب يوسف زغير صباحيNo ratings yet
- Chapter 1: Intro: 1.1 What Operating Systems DoDocument10 pagesChapter 1: Intro: 1.1 What Operating Systems DoBraiden MaggiaNo ratings yet
- UNIT-5: I/O SystemsDocument24 pagesUNIT-5: I/O SystemsKapil NagwanshiNo ratings yet
- Input and OutputDocument38 pagesInput and OutputAili LuggymixNo ratings yet
- Os - Module-1Document100 pagesOs - Module-1Fatema TahaNo ratings yet
- Chapter 1Document46 pagesChapter 1Yididiya TilahunNo ratings yet
- Core of Embedded SystemDocument35 pagesCore of Embedded SystemAruna PatilNo ratings yet
- Operating Systems-Interrupt HandlingDocument9 pagesOperating Systems-Interrupt Handlingcigila6437No ratings yet
- Os Unit-IDocument65 pagesOs Unit-ImudduswamyNo ratings yet
- Wal Be InterruptDocument8 pagesWal Be InterruptwalyiseNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- DFT DerivationDocument2 pagesDFT DerivationtsNo ratings yet
- Lecture1.1 Overview - of - Soft - ComputingDocument27 pagesLecture1.1 Overview - of - Soft - ComputingtsNo ratings yet
- NN Lecture1 IntroductionDocument40 pagesNN Lecture1 IntroductiontsNo ratings yet
- Crisp Set and Fuzzy SetDocument11 pagesCrisp Set and Fuzzy SettsNo ratings yet
- Prep For Texas Instruments SW 2022Document2 pagesPrep For Texas Instruments SW 2022tsNo ratings yet
- Isolation (Computer Science) : o o o o o o oDocument10 pagesIsolation (Computer Science) : o o o o o o oJaynaNo ratings yet
- Autostart of The Intouch® Alarm Utilities: Tech Note 348Document3 pagesAutostart of The Intouch® Alarm Utilities: Tech Note 348Rosy CruzNo ratings yet
- DeDRM AppDocument43 pagesDeDRM AppsureshNo ratings yet
- Oracle 12.1.x and 11.2.0.4 DB Perf Considerations With AIX On POWER8 11-09-2017Document34 pagesOracle 12.1.x and 11.2.0.4 DB Perf Considerations With AIX On POWER8 11-09-2017miguelangel.mirandarios1109No ratings yet
- HEC-RAS v.5.0.3 Model in FEWS - UpdateDocument21 pagesHEC-RAS v.5.0.3 Model in FEWS - Updatejorge andres hereira cabanaNo ratings yet
- VMware Questions and AnswersDocument6 pagesVMware Questions and AnswersManoj ReddyNo ratings yet
- KicadDocument19 pagesKicadeusuntombunNo ratings yet
- Para CDDocument3 pagesPara CDJean Carlos Cconislla SierraNo ratings yet
- Distributed DBMS ArchitecturesDocument9 pagesDistributed DBMS ArchitecturesRekha Jatwani MittalNo ratings yet
- V3 Tool Installation GuideDocument13 pagesV3 Tool Installation GuideLeonardo Floresta NascimentoNo ratings yet
- Create A New Directory Called Week8 For This Lab. Create A Java GUI That Has A Text FieldDocument2 pagesCreate A New Directory Called Week8 For This Lab. Create A Java GUI That Has A Text FieldMuhammad SufyanNo ratings yet
- Unit06 DBMS JntukDocument69 pagesUnit06 DBMS JntukVishal KumarNo ratings yet
- 80186Document24 pages80186a_charaniaNo ratings yet
- 31 - 08-20 MardiDocument11 pages31 - 08-20 MardiElectrodiesel gabesNo ratings yet
- Cognizant Interview QuestionsDocument22 pagesCognizant Interview QuestionsVamsi KrishnaNo ratings yet
- Linux Fundamentals - File System and Partitioning.20121021.183143Document2 pagesLinux Fundamentals - File System and Partitioning.20121021.183143anon_909694178No ratings yet
- UntitledDocument38 pagesUntitledakun garamNo ratings yet
- Linux Commands HMDocument32 pagesLinux Commands HMPunit DosiNo ratings yet
- Pthreads IntroDocument9 pagesPthreads IntroRichard LarancuenteNo ratings yet
- Debian Maintainers GuideDocument61 pagesDebian Maintainers GuiderogerscrogerscNo ratings yet
- AIX - From New User To Technical ExpertDocument372 pagesAIX - From New User To Technical ExpertJuan Carlos Perez AminNo ratings yet
- Installing Redis On Mac OS X - Jasdeep SinghDocument3 pagesInstalling Redis On Mac OS X - Jasdeep SinghAdnin Devit Chandra FortunaNo ratings yet
- CS 213: Parallel Processing Architectures: Laxmi Narayan BhuyanDocument26 pagesCS 213: Parallel Processing Architectures: Laxmi Narayan BhuyanRammurtiRawatNo ratings yet
- Wpars: How and When To Use Them: Application/Workload IsolationDocument9 pagesWpars: How and When To Use Them: Application/Workload IsolationhimansusekharNo ratings yet
- LogcatDocument103 pagesLogcatAmelia ViennaNo ratings yet
- Gem 5Document14 pagesGem 5kbkkrNo ratings yet