You might also like
- Method Statement For Roadbase ConstructionDocument3 pagesMethod Statement For Roadbase ConstructionNordin Yunus93% (84)
- Personal Fitness Unit PlanDocument54 pagesPersonal Fitness Unit PlanCarrie Blais100% (3)
- WavesDocument4 pagesWavesMark ProchaskaNo ratings yet
- Cox Processes and Extensions: 3.1 Construction of Cox Processes With A Given Stochastic IntensityDocument13 pagesCox Processes and Extensions: 3.1 Construction of Cox Processes With A Given Stochastic IntensityLameuneNo ratings yet
- The Kalman Filter Explained: November 27, 2009Document12 pagesThe Kalman Filter Explained: November 27, 2009sisarNo ratings yet
- Application 8Document4 pagesApplication 8Dr. Ir. R. Didin Kusdian, MT.No ratings yet
- Introduction To New Keynesian ModelsDocument15 pagesIntroduction To New Keynesian ModelsJavier Garcia CiccoNo ratings yet
- Hidden Markov ModelsDocument5 pagesHidden Markov ModelssitukangsayurNo ratings yet
- Notes (2) On: Rational Expectations and The "New Classical Macroeconomics"Document27 pagesNotes (2) On: Rational Expectations and The "New Classical Macroeconomics"kNo ratings yet
- ECE 3640 Adaptive Filter Programming Assignment: System IdentificationDocument7 pagesECE 3640 Adaptive Filter Programming Assignment: System IdentificationMihai IgnatNo ratings yet
- Slides Chapter 3aDocument44 pagesSlides Chapter 3aLuca Leimbeck Del DucaNo ratings yet
- Dynare RamseyDocument3 pagesDynare RamseyAdalberto CalsinNo ratings yet
- MIT14 382S17 Lec4Document23 pagesMIT14 382S17 Lec4jarod_kyleNo ratings yet
- ThethtDocument14 pagesThethtcamilo4838No ratings yet
- Quasi Maximum Likelihood - ApplicationsDocument17 pagesQuasi Maximum Likelihood - ApplicationsAnonymous tsTtieMHDNo ratings yet
- Stochastic Processes and Their Applications in Financial PricingDocument7 pagesStochastic Processes and Their Applications in Financial PricingwandileNo ratings yet
- Transforms II - Wavelets: Preliminary Version - Please Report Errors, Typos, and Suggestions For ImprovementsDocument9 pagesTransforms II - Wavelets: Preliminary Version - Please Report Errors, Typos, and Suggestions For ImprovementsAnonymous QQmmPIkTNo ratings yet
- Topic1 Version 1Document8 pagesTopic1 Version 1arsalan1984No ratings yet
- Web Appendix: Model EstimationDocument6 pagesWeb Appendix: Model Estimationlifeis1enjoyNo ratings yet
- Dynamic ProgrammingDocument21 pagesDynamic ProgrammingFranck BanaletNo ratings yet
- 5 - HJBDocument12 pages5 - HJBBogdan ManeaNo ratings yet
- Stochastic CalculusDocument18 pagesStochastic CalculusemailymNo ratings yet
- 1 Clarida-Gali-Gertler Model: T T t+1 TDocument16 pages1 Clarida-Gali-Gertler Model: T T t+1 TMartin ZapataNo ratings yet
- HW 5Document2 pagesHW 5Kuann CNo ratings yet
- Continuous-Time Signals and SystemsDocument37 pagesContinuous-Time Signals and SystemsAbeer HaddadNo ratings yet
- Fourier TransformDocument21 pagesFourier TransformPrudvi RajNo ratings yet
- Monetary Policy - NotesDocument12 pagesMonetary Policy - NotesPedroNo ratings yet
- MTL106 Assignment2BDocument4 pagesMTL106 Assignment2Bvatsaljain0709No ratings yet
- Mixed Constrained Control Problems: Maria Do Rosário de PinhoDocument15 pagesMixed Constrained Control Problems: Maria Do Rosário de PinhoSantos QuezadaNo ratings yet
- Discrete-Time Constrained Portfolio Optimization: Strong Duality AnalysisDocument8 pagesDiscrete-Time Constrained Portfolio Optimization: Strong Duality AnalysisIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Linear Systems ReviewDocument14 pagesLinear Systems Reviewمحمد أشرف حسنNo ratings yet
- Exercises2 - TSADocument3 pagesExercises2 - TSALuca Leimbeck Del DucaNo ratings yet
- Lec16 BocipherousDocument8 pagesLec16 Bocipherousdenmwa2030ceNo ratings yet
- Dynamic Copula Methods in Finance - 2011 - Cherubini - Appendix B Elements of Stochastic Processes TheoryDocument13 pagesDynamic Copula Methods in Finance - 2011 - Cherubini - Appendix B Elements of Stochastic Processes TheoryChikarakara LloydNo ratings yet
- 10 Optimal EstimationDocument14 pages10 Optimal EstimationRajul RahmadNo ratings yet
- State Space ModelsDocument8 pagesState Space ModelsRamanan MuthuramanNo ratings yet
- Convolutions of Complex Exponential FunctionsDocument6 pagesConvolutions of Complex Exponential FunctionschandanaNo ratings yet
- Factor ModelDocument23 pagesFactor Modelamnoman17No ratings yet
- 4 Linear Regression Models With Time Series DataDocument15 pages4 Linear Regression Models With Time Series DataAmera NajemNo ratings yet
- Mathematical and Computer Modelling: K. Maleknejad, M. Khodabin, M. RostamiDocument10 pagesMathematical and Computer Modelling: K. Maleknejad, M. Khodabin, M. Rostamivrubio66No ratings yet
- 1 The Model Intuition: Put It M,1M S σ S σDocument4 pages1 The Model Intuition: Put It M,1M S σ S σDaniel Gonzalez MNo ratings yet
- Parameterized Expectations Algorithm: Lecture Notes 8Document33 pagesParameterized Expectations Algorithm: Lecture Notes 8Safis HajjouzNo ratings yet
- Optimal Pairs Trading - A Stochastic Control ApproachDocument5 pagesOptimal Pairs Trading - A Stochastic Control Approachalexa_sherpyNo ratings yet
- Topic 1: Introduction To Intertemporal Optimization: Yulei LuoDocument59 pagesTopic 1: Introduction To Intertemporal Optimization: Yulei LuoNamNo ratings yet
- The ARMA Model in State Space FormDocument10 pagesThe ARMA Model in State Space FormRéussi ÉlevéNo ratings yet
- Report IRA GroupDocument10 pagesReport IRA GroupRaghavendraSNo ratings yet
- 5.1 Dynamic Programming and The HJB Equation: k+1 K K K KDocument30 pages5.1 Dynamic Programming and The HJB Equation: k+1 K K K KMaria ZourarakiNo ratings yet
- f (t) dt = lim f (τ − t a = t < t < · · · < t - t − t - → 0 as n → ∞ and t ≤ τ ≤ t f (x) dg (x) = lim f (τ − g (t - g - → 0 as n → ∞Document12 pagesf (t) dt = lim f (τ − t a = t < t < · · · < t - t − t - → 0 as n → ∞ and t ≤ τ ≤ t f (x) dg (x) = lim f (τ − g (t - g - → 0 as n → ∞Tu ShirotaNo ratings yet
- State-Space Models. ML Estimation. DSGE Models. Examples of State-Space Models (Cont.)Document9 pagesState-Space Models. ML Estimation. DSGE Models. Examples of State-Space Models (Cont.)DevendraReddyPoreddyNo ratings yet
- Calibration of The LIBOR Market Model - Implementation in PREMIADocument19 pagesCalibration of The LIBOR Market Model - Implementation in PREMIASatyanarayana Murthy MandavilliNo ratings yet
- ErodicityDocument2 pagesErodicityAshish AwasthiNo ratings yet
- 8 PontryaginDocument31 pages8 PontryaginBogdan ManeaNo ratings yet
- Optimal Control: 5.1 Performance IndicesDocument90 pagesOptimal Control: 5.1 Performance IndicesJuancamilo Romero OlarteNo ratings yet
- Lucas Tree PDFDocument11 pagesLucas Tree PDFJohn Nash100% (1)
- TimeSeriesModels - 2022Document30 pagesTimeSeriesModels - 2022Miguel Sacristán de FrutosNo ratings yet
- Business54 Interpretations of The Definite IntegralDocument2 pagesBusiness54 Interpretations of The Definite Integralmarchelo_cheloNo ratings yet
- Dynopt - Dynamic Optimisation Code ForDocument12 pagesDynopt - Dynamic Optimisation Code ForVyta AdeliaNo ratings yet
- Example 3Document2 pagesExample 3Anonymous 80p9OVNo ratings yet
- Guide PDFDocument8 pagesGuide PDFJoab Dan Valdivia CoriaNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- JD Vs Sfa Vs DataDocument1 pageJD Vs Sfa Vs Dataseanwu95No ratings yet
- Plan AsdDocument5 pagesPlan Asdseanwu95No ratings yet
- Topics in Continuous-Time FinanceDocument4 pagesTopics in Continuous-Time Financeseanwu95No ratings yet
- Nordea Markets Complex Risk Presentation Wed, 14 May, 2003, ? Aud ?Document2 pagesNordea Markets Complex Risk Presentation Wed, 14 May, 2003, ? Aud ?seanwu95No ratings yet
- Topics in Continuous-Time Finance, Spring 2003: T X 2 XX: (AF) (X, T)Document4 pagesTopics in Continuous-Time Finance, Spring 2003: T X 2 XX: (AF) (X, T)seanwu95No ratings yet
- Simulation of Diffusion ProcessesDocument4 pagesSimulation of Diffusion Processesseanwu95No ratings yet
- Cir Asfda Asfd AsdfDocument4 pagesCir Asfda Asfd Asdfseanwu95No ratings yet
- A Simple Way To Find Prices, Greeks, and Static Hedges For Barrier OptionsDocument3 pagesA Simple Way To Find Prices, Greeks, and Static Hedges For Barrier Optionsseanwu95No ratings yet
- Topics in Continuous-Time Finance, Spring 2003Document2 pagesTopics in Continuous-Time Finance, Spring 2003seanwu95No ratings yet
- SGSG Asf Asf AsfDocument1 pageSGSG Asf Asf Asfseanwu95No ratings yet
- Testing: TrainingDocument25 pagesTesting: Trainingseanwu95No ratings yet
- Maybe Smart Money Isn't So Smart-MaybesmartmoneyDocument28 pagesMaybe Smart Money Isn't So Smart-Maybesmartmoneyseanwu95No ratings yet
- Chapter 04Document38 pagesChapter 04seanwu95No ratings yet
- Sugga EstionsDocument4 pagesSugga Estionsseanwu95No ratings yet
- Suff - PR As Oject2Document3 pagesSuff - PR As Oject2seanwu95No ratings yet
- Chapter 05Document13 pagesChapter 05seanwu95No ratings yet
- Chapter 03Document12 pagesChapter 03seanwu95No ratings yet
- Djangocms InstallerDocument31 pagesDjangocms Installerseanwu95No ratings yet
- MIT15 450F10 Lec02Document75 pagesMIT15 450F10 Lec02seanwu95No ratings yet
- Chapter 02Document10 pagesChapter 02seanwu95No ratings yet
- Chapter 06Document60 pagesChapter 06seanwu95No ratings yet
- Chapter 01Document12 pagesChapter 01seanwu95No ratings yet
- MIT15 450F10 Lec04Document37 pagesMIT15 450F10 Lec04seanwu95No ratings yet
- Formulir Review Judul Skripsi 2019 (Update 28 Maret 2019) Kevin ThenediDocument2 pagesFormulir Review Judul Skripsi 2019 (Update 28 Maret 2019) Kevin ThenediKevin ThenediNo ratings yet
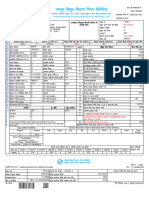
- Billprint 16030727Document1 pageBillprint 16030727Ruloans VaishaliNo ratings yet
- The Legend of Mount MayonDocument2 pagesThe Legend of Mount MayonMae CaspeNo ratings yet
- Bayesian Structural Time Series ModelsDocument100 pagesBayesian Structural Time Series ModelsClaudyaNo ratings yet
- UK Declaration of ConformityDocument2 pagesUK Declaration of ConformityMultitech InternationalNo ratings yet
- Overview of Graphics SystemsDocument74 pagesOverview of Graphics Systemsprasanasridhar100% (1)
- A Simplified Finite Element Model For Structural Cable Bending MechanismDocument15 pagesA Simplified Finite Element Model For Structural Cable Bending MechanismJoaquin VieraNo ratings yet
- 01 Class VI Implementation Manual For UIC Program Directors (2018)Document212 pages01 Class VI Implementation Manual For UIC Program Directors (2018)Stephan Lori MabungaNo ratings yet
- RE - Utilization FactorDocument3 pagesRE - Utilization FactorTed JurcaNo ratings yet
- Glycosyltransferase Engineering For Carbohydrate Synthesis: John B. Mcarthur and Xi ChenDocument14 pagesGlycosyltransferase Engineering For Carbohydrate Synthesis: John B. Mcarthur and Xi ChenJemiNo ratings yet
- Fault Tolerant CAN Bus Control SystemImplemented Into FPGADocument5 pagesFault Tolerant CAN Bus Control SystemImplemented Into FPGAOmer TariqNo ratings yet
- DR Fixit FevicolDocument5 pagesDR Fixit FevicolAbdulhakim SharifNo ratings yet
- 41-1220 S & Y Crane ServicesDocument1 page41-1220 S & Y Crane Servicessamisaeed300No ratings yet
- Wiring Diagram Elevator: PT - Industri Lift Indo NusantaraDocument28 pagesWiring Diagram Elevator: PT - Industri Lift Indo NusantaraGogik AntoNo ratings yet
- Pancreas Function: Acute PancreatitisDocument2 pagesPancreas Function: Acute PancreatitisMemory MahwendaNo ratings yet
- 8.0 Codes and Standards Quality in WeldingDocument9 pages8.0 Codes and Standards Quality in Weldingthanhtung156No ratings yet
- Talmud - Class - Electricity On Shabbat 3 - HandoutDocument3 pagesTalmud - Class - Electricity On Shabbat 3 - Handoutshuki456No ratings yet
- Turonkit: Don Honorio Ventura State UniversityDocument197 pagesTuronkit: Don Honorio Ventura State UniversityJosephNo ratings yet
- Epic Rap Battles of Histor1Document3 pagesEpic Rap Battles of Histor1Duong Chi ThanhNo ratings yet
- Physics Study MaterialDocument54 pagesPhysics Study MaterialCh V S RajuNo ratings yet
- "The Dinner Party" by Mona Gardner - IS102Document2 pages"The Dinner Party" by Mona Gardner - IS102Apple Grace TalamonNo ratings yet
- Proportioning Concrete Mixtures With Graded AggregatesDocument86 pagesProportioning Concrete Mixtures With Graded AggregatesM HAFEEZ RAJA100% (2)
- Metal Bridge Study Part 1Document132 pagesMetal Bridge Study Part 1Gary VinesNo ratings yet
- General ExaminationDocument112 pagesGeneral ExaminationChiranjeevi Kumar EndukuruNo ratings yet
- Capacity Report FormatDocument9 pagesCapacity Report FormatsaimaNo ratings yet
- Microphone Data SheetDocument3 pagesMicrophone Data SheetworldwidevisionpvtltdNo ratings yet
- Aircraft BasicsDocument328 pagesAircraft BasicsJhony Bhat100% (1)