0% found this document useful (0 votes)
43 views10 pagesEmbedded C Programs
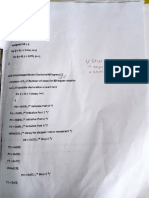
The document contains Embedded C programs for controlling a stepper motor, a 7-segment display, and a DC motor using an LPC21xx microcontroller. It provides code snippets for clockwise and anti-clockwise rotation of the stepper motor, displaying values on a 7-segment display based on button presses, and controlling the direction of a DC motor. Each section includes initialization, main loop, and specific functions for motor control and display management.
Uploaded by
poweranil777Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
43 views10 pagesEmbedded C Programs
The document contains Embedded C programs for controlling a stepper motor, a 7-segment display, and a DC motor using an LPC21xx microcontroller. It provides code snippets for clockwise and anti-clockwise rotation of the stepper motor, displaying values on a 7-segment display based on button presses, and controlling the direction of a DC motor. Each section includes initialization, main loop, and specific functions for motor control and display management.
Uploaded by
poweranil777Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd