You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lee - The Design of CMOS RF Integrated CircuitsDocument610 pagesLee - The Design of CMOS RF Integrated CircuitsShounak Chakraborty89% (19)
- Discrete-Data Control Systems: Benjamin C. KuoDocument1 pageDiscrete-Data Control Systems: Benjamin C. KuoSandra GilbertNo ratings yet
- Eiosis AirEQ Premium - User GuideDocument48 pagesEiosis AirEQ Premium - User GuideSebastian RehbeinNo ratings yet
- Deviser TV Analyser S7000: Část 1: Analyzátor FunkceDocument15 pagesDeviser TV Analyser S7000: Část 1: Analyzátor FunkceAlexander WieseNo ratings yet
- GPS ArchitectureDocument13 pagesGPS ArchitectureMohamed ArifNo ratings yet
- Digital Signal Processing: Signals and SystemsDocument30 pagesDigital Signal Processing: Signals and SystemsJesus PeñaNo ratings yet
- 3G Troubleshooting - CapacityDocument42 pages3G Troubleshooting - Capacitycmp256100% (1)
- Ac Circuit Syllabus 2Document12 pagesAc Circuit Syllabus 2ferdinandNo ratings yet
- MGN 63 Use of Electronic Aids To NavigationDocument9 pagesMGN 63 Use of Electronic Aids To Navigationvn596174No ratings yet
- 8K-ESP8266 Sniffer Introduction en v0.3Document9 pages8K-ESP8266 Sniffer Introduction en v0.3zaleksNo ratings yet
- Topics For Microwave Theory Engineering 3 RD YearDocument3 pagesTopics For Microwave Theory Engineering 3 RD YearAnuj PathakNo ratings yet
- Uhfcb Ic-41s BrochureDocument2 pagesUhfcb Ic-41s Brochureseksan100% (2)
- Thesis NirajDocument67 pagesThesis NirajMehul VanviNo ratings yet
- Ad 1862Document12 pagesAd 1862dymx69No ratings yet
- 20 Com208Document16 pages20 Com208CauVong JustinNo ratings yet
- Exp 7 - Com01lab - LimDocument8 pagesExp 7 - Com01lab - LimLIM Sheryl M.No ratings yet
- Survival Craft: GMDSS Portable ForDocument2 pagesSurvival Craft: GMDSS Portable ForSaga LabaNo ratings yet
- Inmarsat Fleet F77 MesDocument30 pagesInmarsat Fleet F77 MesANDREYNo ratings yet
- Lecture Basics of FTDocument35 pagesLecture Basics of FTmnaNo ratings yet
- MCBSP SPI TutorialDocument3 pagesMCBSP SPI TutorialS Rizwan HaiderNo ratings yet
- Analysis of RLC Circuits Using MATLABDocument1 pageAnalysis of RLC Circuits Using MATLABDesy KumalaNo ratings yet
- T Rec G.798.1 201301 I!!pdf eDocument54 pagesT Rec G.798.1 201301 I!!pdf echantinh_hd190No ratings yet
- Type Approval For Short Range Devices Bahrain 2020Document38 pagesType Approval For Short Range Devices Bahrain 2020Selin AlanceNo ratings yet
- Antennas For RFID TagsDocument13 pagesAntennas For RFID TagskiranNo ratings yet
- Worksheet-03: All AllDocument11 pagesWorksheet-03: All AllfghreihghNo ratings yet
- Literature Survey: 4G TechnologyDocument21 pagesLiterature Survey: 4G TechnologyVasundhara BhatNo ratings yet
- S.No. Roll No Name ProgramDocument21 pagesS.No. Roll No Name ProgramKottapalli Sundar mahesh (RA1811034010048)No ratings yet
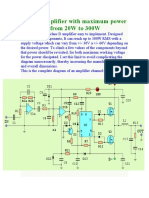
- Class D Amplifier With Maximum Power Adjustable From 20W To 300WDocument13 pagesClass D Amplifier With Maximum Power Adjustable From 20W To 300Wramontv032428100% (1)
- WcdmaDocument14 pagesWcdmadangdoan2008No ratings yet
- LTE Bro en Rohde & SchwarzDocument4 pagesLTE Bro en Rohde & SchwarzMadan G TiwariNo ratings yet