You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- GM360 Service Maual VHF Info A4Document34 pagesGM360 Service Maual VHF Info A4Christine PatrickNo ratings yet
- High Altitude Aeronautical Platforms - HAAPSDocument23 pagesHigh Altitude Aeronautical Platforms - HAAPSRajendra KumarNo ratings yet
- AUTOMATIC CAR SPEED +RF Control ArudinoDocument19 pagesAUTOMATIC CAR SPEED +RF Control ArudinomukulNo ratings yet
- Optical Fiber BasicDocument48 pagesOptical Fiber BasicAntariksha Singh100% (1)
- EPONDocument41 pagesEPONMohammad MahfouzNo ratings yet
- WA-54P Pro User Manual (Portuguese) PDFDocument9 pagesWA-54P Pro User Manual (Portuguese) PDFMaykon MaycoolNo ratings yet
- 3.3G Cellular, WMAN (WIMAX), WLAN (WIFI), WPAN (Bluetooth and UWB), Mobile Ad Hoc Networks (MANET), and Wireless Sensor NetworksDocument36 pages3.3G Cellular, WMAN (WIMAX), WLAN (WIFI), WPAN (Bluetooth and UWB), Mobile Ad Hoc Networks (MANET), and Wireless Sensor Networksskynet_rootNo ratings yet
- Feedback AmplifiersDocument36 pagesFeedback Amplifierssaravananvaratharajan4No ratings yet
- Power Budget: Pre-Planning Detailed Planning Post - PlanningDocument39 pagesPower Budget: Pre-Planning Detailed Planning Post - PlanningHân TrươngNo ratings yet
- AP SBTET V Sem Optical Fibre Communication C14 Mar-Apr 2019 QPDocument2 pagesAP SBTET V Sem Optical Fibre Communication C14 Mar-Apr 2019 QPalinisamaryam1No ratings yet
- PAM and Flat Top PAMDocument13 pagesPAM and Flat Top PAMGoitom HaileNo ratings yet
- LINKSYS Wusb54gsc Wireless-G LINKSYS by CiscoDocument38 pagesLINKSYS Wusb54gsc Wireless-G LINKSYS by CiscolizNo ratings yet
- Cobham Waveguide Load RangeDocument3 pagesCobham Waveguide Load RangeCobhamMicrowaveNo ratings yet
- Econdary Urveillance Adar Irborne Eather Adar: S S R (SSR) & A W R (AWR)Document18 pagesEcondary Urveillance Adar Irborne Eather Adar: S S R (SSR) & A W R (AWR)H R VALA100% (1)
- Iphone 6+ Schematics PDFDocument54 pagesIphone 6+ Schematics PDFesteban cardonaNo ratings yet
- MMIC Test Boards: Instructions For Use (AN-60-036) : ValueDocument5 pagesMMIC Test Boards: Instructions For Use (AN-60-036) : Valuefarlocco23No ratings yet
- AWMN Unit - 2Document39 pagesAWMN Unit - 2P0526 VaijayanthiNo ratings yet
- VerilogA TutDocument47 pagesVerilogA TutSaurabh ChaubeyNo ratings yet
- Fractional Fourier TransformDocument12 pagesFractional Fourier Transformvolly666No ratings yet
- DAEWOO Transponder CatalogDocument2 pagesDAEWOO Transponder CatalogKIMI GOKU YTNo ratings yet
- Ece CMM R15Document2 pagesEce CMM R15VITS 18-443No ratings yet
- MAPs Limited Contention ProtocolsDocument60 pagesMAPs Limited Contention ProtocolsSahilPrabhakar100% (1)
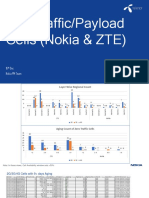
- Zero Traffic Payload CellsDocument5 pagesZero Traffic Payload Cellssajid hassankhanNo ratings yet
- A6 Elg4179Document2 pagesA6 Elg4179Divine CiromaNo ratings yet
- DigiMax 96k (OM)Document22 pagesDigiMax 96k (OM)Carlos SantamaríaNo ratings yet
- Objective:: Analyze Pulse Code Modulation SystemDocument54 pagesObjective:: Analyze Pulse Code Modulation SystemRed SafireNo ratings yet
- 401 X 0 B 25Document266 pages401 X 0 B 25rohitvanNo ratings yet
- 3GPP TS 27.007 V14.4.0Document347 pages3GPP TS 27.007 V14.4.0Nguyên PhongNo ratings yet
- 5 Mac-2Document14 pages5 Mac-2Chakravarthi rocksNo ratings yet
- Sensors: An Integrated Low-Power Lock-In Amplifier and Its Application To Gas DetectionDocument20 pagesSensors: An Integrated Low-Power Lock-In Amplifier and Its Application To Gas DetectionFrank PatricioNo ratings yet