You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Design & Detail Col Base PlateDocument19 pagesDesign & Detail Col Base PlateJoel MooreNo ratings yet
- BS en 13001-3-6-2018Document60 pagesBS en 13001-3-6-2018Ash TurnerNo ratings yet
- Design of Plumbing Systems For Multi-Storey Buildings PDFDocument14 pagesDesign of Plumbing Systems For Multi-Storey Buildings PDFpequenita34100% (4)
- ComparatorsDocument25 pagesComparatorsMayank KhinchiNo ratings yet
- Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation SheetDocument28 pagesCalculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheet Calculation Sheethyoung65No ratings yet
- Test Q&ADocument3 pagesTest Q&AEngr.Mmosaad57% (7)
- Mechanical Calculation Sheet Drafting Procedure PDFDocument50 pagesMechanical Calculation Sheet Drafting Procedure PDFlongnhar100% (10)
- 001-Sample Method Statement Piping Pre-ShutdownDocument4 pages001-Sample Method Statement Piping Pre-ShutdownS.C.Satish ChanderNo ratings yet
- Aci 544.1R-96Document66 pagesAci 544.1R-96Tran Tuan KietNo ratings yet
- Eaching High-Rise Plumbing DesignDocument19 pagesEaching High-Rise Plumbing Designm_salah20202000No ratings yet
- Esdep Lecture Note (Wg1a) .1Document13 pagesEsdep Lecture Note (Wg1a) .1Tran Tuan KietNo ratings yet
- RPUB00003Document40 pagesRPUB00003Ko PaukNo ratings yet
- Springer Transactions in Civil and Environmental EngineeringDocument10 pagesSpringer Transactions in Civil and Environmental EngineeringTran Tuan KietNo ratings yet
- L22 SummaryDocument2 pagesL22 SummaryAndrei AevoaieNo ratings yet
- l03 React Tank 1Document17 pagesl03 React Tank 1MuhammadUsmanNo ratings yet
- l15 Reac Kine 2 PDFDocument7 pagesl15 Reac Kine 2 PDFTran Tuan KietNo ratings yet
- Bao - Trung My Au Ket Cau Thep Thiet Ke So SanhDocument1 pageBao - Trung My Au Ket Cau Thep Thiet Ke So SanhTran Tuan KietNo ratings yet
- PubDocument8 pagesPubTran Tuan KietNo ratings yet
- 1 PDFDocument23 pages1 PDFAsad Jalil100% (1)
- CE 465 Water Supply and Sewage System DesignDocument3 pagesCE 465 Water Supply and Sewage System Designkiet20002000No ratings yet
- ReviewDocument3 pagesReviewTran Tuan KietNo ratings yet
- E2 20b 02 01Document6 pagesE2 20b 02 01Tran Tuan KietNo ratings yet
- ContentsDocument9 pagesContentsTran Tuan KietNo ratings yet
- Chapter 7: Solving Structural Dynamic Problems Using Dcalc: Designcalcs, Inc. (Http://Dcalc - Us)Document23 pagesChapter 7: Solving Structural Dynamic Problems Using Dcalc: Designcalcs, Inc. (Http://Dcalc - Us)سكان المعادى جراند سيتىNo ratings yet
- Anh Vaên Chuyeân Ngaønh: Baøi GiaûngDocument53 pagesAnh Vaên Chuyeân Ngaønh: Baøi GiaûngTran Tuan KietNo ratings yet
- TableDocument7 pagesTableTran Tuan KietNo ratings yet
- Baigiang Avcn A4 3616Document2 pagesBaigiang Avcn A4 3616Tran Tuan KietNo ratings yet
- 50 FMCDocument4 pages50 FMCTran Tuan KietNo ratings yet
- Acosta 2007Document2 pagesAcosta 2007Tran Tuan KietNo ratings yet
- ACI - Measurement of Properties of Fiber Reinforced ConcreteDocument12 pagesACI - Measurement of Properties of Fiber Reinforced ConcreteTran Tuan Kiet100% (1)
- Brandt 2008Document7 pagesBrandt 2008Tran Tuan KietNo ratings yet
- Durability of Strain-Hardening Cement Composites (SHCC) - An OverviewDocument8 pagesDurability of Strain-Hardening Cement Composites (SHCC) - An OverviewTran Tuan KietNo ratings yet
- For Aeronautics: Technical NOTE 2433Document31 pagesFor Aeronautics: Technical NOTE 2433Tran Tuan KietNo ratings yet
- How To Reply To Peer Review Comments When Submitting Papers For Publication PDFDocument15 pagesHow To Reply To Peer Review Comments When Submitting Papers For Publication PDFAbhay KumarNo ratings yet
- 2 3Document18 pages2 3Tran Tuan KietNo ratings yet
- Micromechanics of Crack Bridging in Fibre-Reinforced ConcreteDocument9 pagesMicromechanics of Crack Bridging in Fibre-Reinforced ConcreteTran Tuan KietNo ratings yet
- Continuum Mech Problem Set #3Document1 pageContinuum Mech Problem Set #3behzadNo ratings yet
- MT MTZ Ordering GuideDocument1 pageMT MTZ Ordering GuideJerine BabuNo ratings yet
- Volumetric Efficiency For Reciprocating CompressorDocument2 pagesVolumetric Efficiency For Reciprocating CompressorKrishna PATELNo ratings yet
- An Introduction To PsychrometryDocument15 pagesAn Introduction To PsychrometryWONG TSNo ratings yet
- ProjectDocument17 pagesProjectRavi ChotaliyaNo ratings yet
- Isuzu REDTech 4J Lit SheetDocument2 pagesIsuzu REDTech 4J Lit SheetVăn Tuấn NguyễnNo ratings yet
- Sheet Kinematics Student Copy With AnsDocument44 pagesSheet Kinematics Student Copy With AnsSwatiNo ratings yet
- Plane Stress LoadingDocument19 pagesPlane Stress LoadingAjeet Kumar100% (1)
- Chapter 6 - Water Distribution 2 PDFDocument40 pagesChapter 6 - Water Distribution 2 PDFMohammedAlSahariNo ratings yet
- Burns, Parry - Effect of Mean Shear Stress On The Fatigue IDocument9 pagesBurns, Parry - Effect of Mean Shear Stress On The Fatigue IDavid C HouserNo ratings yet
- PurifierDocument5 pagesPurifierPanagiotis MouzenidisNo ratings yet
- Shortage 08112023Document360 pagesShortage 08112023ahmadridwanhpNo ratings yet
- Piston Only PagesDocument13 pagesPiston Only Pagesirwandi trinovNo ratings yet
- Perkins Diesel EngineDocument12 pagesPerkins Diesel EngineDilhan RajasekaraNo ratings yet
- Performance Analysis II - Steady Climb, Descent and Glide - 3 TopicsDocument9 pagesPerformance Analysis II - Steady Climb, Descent and Glide - 3 TopicsChegrani AhmedNo ratings yet
- Isuzu Exp Ubs Workshop Manual Part 2Document20 pagesIsuzu Exp Ubs Workshop Manual Part 2jerome100% (53)
- Yellow JacketDocument6 pagesYellow Jacketnod69assNo ratings yet
- Conectores Rele Arranque Aveo 2005Document3 pagesConectores Rele Arranque Aveo 2005Jose Luis Velasquez RomeroNo ratings yet
- Results of Slab Test: Table 7-1: Strength Properties A/the Slabs MixDocument20 pagesResults of Slab Test: Table 7-1: Strength Properties A/the Slabs MixCharles Kyle CerezoNo ratings yet
- Pipecoater-Iii/900: Internal Pipecoater For Pipe ID 300 MM To 900 MM (12" - 36")Document2 pagesPipecoater-Iii/900: Internal Pipecoater For Pipe ID 300 MM To 900 MM (12" - 36")BepdjNo ratings yet
- Essential Conditions For Efficient Engine OperationDocument4 pagesEssential Conditions For Efficient Engine OperationMelanie Saldivar CapalunganNo ratings yet
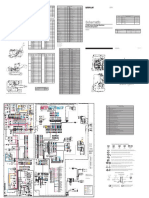
- 315B Forest Swing Machine Electrical System: 7RZ284-UPDocument2 pages315B Forest Swing Machine Electrical System: 7RZ284-UPGilvan JuniorNo ratings yet
- Topspec Hose ReelsDocument2 pagesTopspec Hose ReelsDilip SinghNo ratings yet