You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Altium InstallationDocument3 pagesAltium InstallationUmer_Farooq_1557No ratings yet
- TI-Nspire Programming - TI-Basic DeveloperDocument14 pagesTI-Nspire Programming - TI-Basic DeveloperHelloWorld124No ratings yet
- Cs GSM NewDocument5 pagesCs GSM NewAnil KumarNo ratings yet
- 3Gpp RRC Specs TS 25.331Document1,471 pages3Gpp RRC Specs TS 25.331Sonali DholamNo ratings yet
- Evaluation of Tdoa Techniques For Position Location in Cdma SystemsDocument125 pagesEvaluation of Tdoa Techniques For Position Location in Cdma SystemsTommy WalkerNo ratings yet
- Evaluation of Tdoa Techniques For Position Location in Cdma SystemsDocument125 pagesEvaluation of Tdoa Techniques For Position Location in Cdma SystemsTommy WalkerNo ratings yet
- Performance Analysis of RLC/MAC Protocol in GPRSDocument11 pagesPerformance Analysis of RLC/MAC Protocol in GPRSAnil KumarNo ratings yet
- P2 PTrustDocument5 pagesP2 PTrustAnil KumarNo ratings yet
- Huawei RAN 11 KPI Reference - (V900R011C00 - 02)Document117 pagesHuawei RAN 11 KPI Reference - (V900R011C00 - 02)rmartimo100% (1)
- TEMS-Optimization and Log File Analysis in GSMDocument94 pagesTEMS-Optimization and Log File Analysis in GSMapi-26684041100% (23)
- Good Geolocation CalculationDocument14 pagesGood Geolocation CalculationAnil KumarNo ratings yet
- Sprint Xohm X-Stream infrastructure confidentialDocument16 pagesSprint Xohm X-Stream infrastructure confidentialAnil KumarNo ratings yet
- Apache Spark InstallationDocument4 pagesApache Spark InstallationHarshit SinhaNo ratings yet
- Understanding Computer ArchitectureDocument38 pagesUnderstanding Computer Architecturearegawi weleabezgiNo ratings yet
- High Voltage Insulation Oil TesterDocument5 pagesHigh Voltage Insulation Oil TesterErAkashAryanNo ratings yet
- Dunlee OEM CatalogDocument20 pagesDunlee OEM CatalogErik JirikNo ratings yet
- Configure SPM 2012 On Windows 7 LaptopDocument7 pagesConfigure SPM 2012 On Windows 7 Laptopcgf_arNo ratings yet
- Caesar IV - Manual PDFDocument38 pagesCaesar IV - Manual PDFAna BîrsanNo ratings yet
- Assignment 2 QP MPMC - ITDocument1 pageAssignment 2 QP MPMC - ITProjectsNo ratings yet
- HP Proliant DL380 G7 Storage SystemDocument22 pagesHP Proliant DL380 G7 Storage SystemHakim HamzaouiNo ratings yet
- Create New Project CodeVision AVR (LED)Document5 pagesCreate New Project CodeVision AVR (LED)calvinNo ratings yet
- Perfusor Space 2 - 0 PDFDocument142 pagesPerfusor Space 2 - 0 PDFDomenico Me-SysNo ratings yet
- Debug 1214dfdfsfDocument3 pagesDebug 1214dfdfsfyusrimaturriskaNo ratings yet
- Introduction to Operating System Functions and Types (35 charactersDocument33 pagesIntroduction to Operating System Functions and Types (35 charactersYatharth GargNo ratings yet
- 2013 544 Sagrillo PPTDocument34 pages2013 544 Sagrillo PPTThota Mahesh DbaNo ratings yet
- Cisco - How To Configure NTPDocument12 pagesCisco - How To Configure NTPMustaffah KabelyyonNo ratings yet
- GDL IntroDocument12 pagesGDL IntroBurgheleaGeorgeNo ratings yet
- Student DatabaseDocument27 pagesStudent DatabaseBharathi GunasekaranNo ratings yet
- Ricoh 1515 Manual PDFDocument68 pagesRicoh 1515 Manual PDFRudy ZydelNo ratings yet
- Move201910 Install Guide PDFDocument10 pagesMove201910 Install Guide PDFLambok ManurungNo ratings yet
- Manual Armado PC5500 PDFDocument104 pagesManual Armado PC5500 PDFclaudioNo ratings yet
- R7 Series Datasheet en 200607Document8 pagesR7 Series Datasheet en 200607Dany VallejoNo ratings yet
- Sads DemoDocument63 pagesSads DemoMr LamNo ratings yet
- Alaric HPS 1.6. Build FlowDocument11 pagesAlaric HPS 1.6. Build Flowmailmanager8946No ratings yet
- D 2 TornadoDocument2 pagesD 2 TornadoDave BarnhartNo ratings yet
- DHT 11Document12 pagesDHT 11Raja Fathurrahim AkmaludinNo ratings yet
- Presentation of Snake GameDocument16 pagesPresentation of Snake GameSri hari50% (2)
- Types of SoftwareDocument11 pagesTypes of SoftwareJorinda EvangelistaNo ratings yet
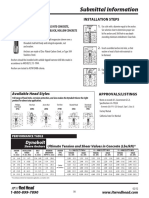
- Submittal Information: Dynabolt SleeveDocument2 pagesSubmittal Information: Dynabolt Sleeveanto081287No ratings yet