2012, IJARCSSE All Rights Reserved Page | 29
Volume 2, Issue 6, June 2012 ISSN: 2277 128X
International Journal of Advanced Research in
Computer Science and Software Engineering
Research Paper
Available online at: www.ijarcsse.com
A Model For Real Time Sign Language Recognition System
P.V.V.Kishore
Dept. of electronics and communications engineering
Miracle Educational Society Group of Institutions
Miracle City, Bhoghapuram,
INDIA
P.Rajesh Kumar
Dept. of electronics and communications engineering
Andhra University College of Engineering
Visakhapatnam,
INDIA
Abstract: This paper proposes a real time approach to recognize gestures of sign language. The input video to a sign language
recognition system is made independent of the environment in which signer is present. Active contours are used to segment
and track the non-rigid hands and head of the signer. The energy minimization of active contours is accomplished by using
object color, texture, boundary edge map and prior shape information. A feature matrix is designed from segmented and
tracked hand and head portions. This feature matrix dimensions are minimized by temporal pooling creating a row vector for
each gesture video. Pattern classification of gestures is achieved by implementing fuzzy inference system. The proposed system
translates video signs into text and voice commands. The training and testing of Fuzzy Inference system is done using Indian
Sign Language. Our data base has 351 gestures with gesture repeated 10 times by 10 different users. We achieved a recognition
rate of 96% for gestures in all background environments.
Keywords: Sign Language Recognition, Color, texture, boundary and shape information, Hand and Head Segmentation and
tracking, level sets, temporal pooling, fuzzy inference system.
I. INTRODUCTION
The key principle behind this paper is proposing a
method to improve the communication between deaf
community and normal people for better social and
intellectual life. Sign language is as old as the race itself
and its earliest history is equally ambiguous. Sign language
is defined as a language of that uses systems of manual,
facial and other body movements as the means of
communication predominantly among deaf people.
Sign language recognition is multidisciplinary research
area involving computer vision, image segmentation,
pattern recognition and neural language processing. Sign
language recognition is a comprehensive problem because
of the complexity of the shapes of hand and head gestures.
Sign language recognition requires the knowledge of hands
position, shape, motion, orientation and facial expressions.
A functional sign language recognition system can be used
to generate speech or text making the hearing impaired
person more independent. The most complicated part of
sign language recognition system is to recognize the
simplest hand gestures that must be detected in the image.
M.K. Bhuyan et al. [1] have developed a framework for
hand gesture recognition, they propose a gesture
recognition system based on object-based video abstraction
technique. Their experimental result shows that their
recognition system can be used reliably in recognizing
some signs of native Indian sign language [13].
Thad Starner et al and others [2, 3, 4] have presented an
extensive system which uses a color camera to track hands
in real time and interprets American Sign Language (ASL)
using Hidden Markov Models (HMMs) with a vocabulary
of 40 signs. Signs are modeled with four states-HMM and
they have achieved recognition accuracies between 75%
and 99%.
Eng-Jon Ong and Bowden [4] have developed an
unsupervised approach to train a robust detector the
presence of human hands within an image and classified
the hand shape. In their work, a database of a hand
gesture images were created and clustered into sets of
similar looking hands using k-means clustering
algorithm. Wilson and Bobick [5] have proposed a
state-based technique for the representation and
recognition of gesture. Noor Saliza Mohd Salleh et al.
[6] have presented techniques and algorithms for hand
detection and gesture recognition process using hand
shape variations and motion information as the input to
the Hidden Markov Model based recognition system.
Rini Akmelia et al. [7] have developed a real-time
Malaysian sign language translation using colour
segmentation and achieved a recognition rate of 90%.
One of the major difficulties arise in the form of
background in which signer is located. Most of the
methods developed so far use simple backgrounds
[8,9,10,11] in controlled set-up such as simple
backgrounds, special hardware like data
gloves[12,13,14], restricted sets of actions, restricted
number of signers, resulting different problems in sign
language feature extraction.
The active contours was first introduced by
Terzopoulos [15,16]. The basic idea behind active
contours is to start with a curve anywhere in the image
and move the curve in such way that it sticks to the
boundaries of the objects in the image, thus separating
the background of the image from its objects. The
original snakes algorithm was prone to topological
disturbances and is exceedingly susceptible to initial
conditions. However with invention of level sets [17]
topological changes in the objects are automatically
handled.
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 30
For tracking non-rigid moving objects the most popular
model based technique is active contours [18]. Active
contours can bend themselves based on the characteristics
of the objects in the image frame. First created active
contour models are only capable of tracking an object in a
video sequence with a static background [19]. Jehan-Besson
et.al [20] tracked objects in successive frames by matching
the object intensity histogram using level sets. Though, the
tracking error was minimum, it increased if the object
experiences intensity transformation due to noise or
illumination changes. Almost all active contours methods
discussed above suffer from problems related to cluttered
backgrounds, lacking in texture information and occlusions
from other objects in a video sequence. These problems can
cause the performance of tracking non-rigid objects to
decrease drastically.
Segmentation and tracking results are fused together to
form a feature matrix which is unique from the methods
proposed for sign language feature extraction in [21,22,23].
Pattern classification is done by employing fuzzy inference
system [24,25,26,27].
The rest of the paper is organized as follows: sect. 2, we
introduce the proposed system for recognizing gestures of
Indian Sign Language (INSLR). Sect.3, presents proposed
segmentation and tracking using active contours. Sect.4,
gives the creation of feature matrix. Sect.5, pattern
classification using neural network and Sect.6, we discuss
experiments under various test conditions. Finally Sect.7,
we briefly conclude with future scope of our research.
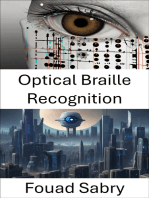
II. PROPOSED SYSTEM ARCHITECTURE
The proposed system has four processing stages namely,
hand and head segmentation, hand and head tracking,
feature extraction and gesture pattern classification. Fig. 1
shows the block process flow diagram of the proposed
method. Video segmentation and tracking stage divides the
entire frames of images of the signers into hands and head
segments and tracking stage calculates the location of the
segmented hands and head. Features are extracted and are
optimized before saving to the database. This process is
repeated for all the available signs using a video of a signer.
The sign language database can be upgraded to add new
signs into the database.
The fuzzy rule based system is a very powerful tool
used by many researchers for pattern classification tasks.
Once trained the fuzzy inference system produces a voice
and text response corresponding to the sign irrespective of
the signer and changing lighting conditions.
III. SEGMENTATION AND TRACKING
A. Hands and Head Segmentation and Tracking
This section presents the video object segmentation and
tracking of hands and head simultaneously from a range of
video backgrounds under different lighting conditions with
diverse signers. A video sequence is defined as a sequence
of image frames ( , , ) : I x y t D9 where the images
change over time. Alternatively a succession of image
frames can be represented as
( ) n
I where 0 n s s . The
basic principle behind our proposed segmentation and
tracking technique is to localize the segment and track one
or more moving objects of the
th
n frame from the cues
available from previous segmented and tracked objects in
frames
(1) (2) ( )
, .....
N
I I I such that subsequent contours
1 2
, .......
N
I I I are available. The sign videos are
composed of many moving objects along with the hands
and head of the signer. We considered signers hands and
hand as image foreground denoted by
( )
f
n
I and rest of the
objects as the image background
( )
b
n
I for the image
( ) n
I
in the video sequence. We may denote foreground
contour of the hands and head by
( )
f
n
I Our proposed
video segmentation algorithm segments hands and head
of signers using color, texture, boundary and shape
information about the signer given precedent
understanding of hand and head shapes from
( 1)
f
n
I
and
( 1)
b
n
I
.
Figure 1. Sign Language Recognition System Architecture.
B. Color and and Texture Formulation
We choose manually the color plane which
highlights the human object from a background of
clutter. Once a color plane is identified, texture features
are calculated using coorelogram of pixel
neighbourhood [28]. Texture is an irregular distribution
of pixel intensities in an image. Allam.et.al [29]
established that co-occurrence matrix (CMs) produce
better texture classification results than other methods.
Gray Co-occurrence matrix (GLCM) presented by
Haralick.et.al [30] is most effectively used algorithm for
texture feature extraction for image segmentation.
Let us consider a color plane of our original RGB
video. The R color plane is now considered as a M N
R coded 2D image. The element of co-occurrence matrix
, d
C
u
defines the joint probability of a pixel
i
x of R
color intensity
i
r at a distance d and orientation u to
another pixel
j
x at R color intensity
j
r . For each co-
occurrence matrix, we calculate four statistical
properties: contrast, correlation, energy and
homogeneity.
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 31
We used four different orientations
3
{0, , , }
4 2 4
t t t
u = and two distance measures ( 1,1) d =
for calculation of GLCM matrix.
Finally a feature vector ( )
v
f x is produced which is a
combination of any one or all of the color planes and
texture vector. Thus
(1) (2) ( )
( ) { ( ), ( ),..............., ( )}
v n
f x f x f x f x = the feature
vector contains color and texture values of each pixel in the
image. This is a 5D feature vector allocating the first vector
for any of the three color planes (R,G,B) and the next four
vectors for texture. We can also use all three color planes to
represent color, and then the feature vector becomes a seven
dimension feature vector.
we classify them as background and foreground pixels
using K-Means clustering algorithm. Given
dimensional feature vector and the K-Means
algorithm classify this vector into categories. The
centroids of each group are used to identify each of the
clusters where 1, 2,.... , all N 1 c N for = > . For every
new classification the difference between the new vector
and all the centroids is computed. The centroid
corresponding to smallest distance is judged as the vector
that belongs to the group.
min ( )
v
c c
d f x s = (1)
d is the distance of every new ( )
v
f x of each frame to
the previously computed centroids. All the pixels are
classified and average of all pixel values in each cluster is
calculated. The centroids are replaced by new average and
pixels are classified again until all cluster centers become
rigid. In the first frame
(1)
I all objects and background
clusters are created. The object region contains three
clusters of foreground
(1)
, where i =1 to 3
i
f
C and
background region
(1)
, where j =1 to 2
j
b
C into two
clusters. We will assume at this point is that objects in the
video sequence pretty much remain same compared to
background that varies due to camera movement or changes
in background scenes. This can be taken care by
periodically updating the background clusters with some
threshold if the changes in consecutive background frame
cross the specified threshold.
To move the contour on to the objects of interest we
minimize the following energy function
CT
E from color
and texture according to the initial object contour
f
I
3 2
( 1) ( ) ( 1) ( )
1 1
( ) ( , ) ( , )
i i j j
CT f n n n n
f f b b
i j
obj bck
E I D C C dx D C C dx
= =
= +
} }
(2)
where
( 1)
i
n
f
C
and
( 1)
j
n
b
C
are object and background
centroids of previous frame
( )
i
n
f
C and
( )
j
n
b
C are object
and background clusters from current frame. The
( 1) n frame cluster centroids will become the frame
initial centroid and the object contour is moved by
minimizing the Euclidean distance between the two
centroids. We can implement this by assigning pixel to
object in the current frame when
( 1) ( ) ( 1) ( )
( , ) ( , )
i i j j
n n n n
f f b b
D C C D C C
> and to the
background otherwise.
C. Boundary Edge Map Module
we extracted boundary edge map of the image objects
which only depends on image derivatives. The way out
would be to couple the region information in the form
of color and texture features to boundary edge map to
create a good tracking of image objects.
We define the boundary
o
B as pixels that are
present in edge map of the object. The boundary pixels
can be calculated by using gradient operator on the
image. To align the initial contour
o
I from previous
frame to the objects in the current frame to pixels on the
boundary we propose to minimize the following energy
function
( )
( ) ( ( ))
O f o
arc Length of obj
E I g B x dx =
}
(3)
where ( ) arc Length of obj is the length of the object
boundary. The function g is an edge detection
function. The boundary energy reaches to a minimum
when the initial contour aligns itself with the boundary
of the objects in the image. The minimization of energy
in eq.3 also results in a smooth curve during evolution
of the contour.
D. Prior Shape Information Module
The active contour can be influenced by giving
information regarding the shape of the object computed
from the previous frames.
The following method in [31] is used to construct the
influence of shape of non-rigid objects in the image
sequence. As for the first fame
(1)
I where prior shape
information is not available we just use the region and
boundary information for segmentation. The segmented
objects in frame one are used to initialize contours in
the next frame for segmentation and tracking. For
( )
1
n
I n > the tracking of
( ) n
I is given by the level set
contour
n
I which minimizes the energy function
int
0
( ) ( )
S f
E I x dx |
I
=
}
(4)
Thus by applying shape energy to the level set we
can effectively segment and track hands and head in sign
videos and we could differentiate between object
contour modifications due to motion and shape changes.
E. Combining Energy Functions
By integrating the energy functions from color,
texture, boundary and shape modules we formulate the
following combined energy functional of the active
contour as
( ) ( ) ( ) ( )
f f O f S f
Int CT
E I E I E I E I o | = + +
(5)
Where , , o | are weighting parameters that provide
stability to contribution from different energy terms. All
terms are positive real numbers. The minimization of
the energy function is done with the help of Euler-
Lagrange equations and realized using level set
functions. The resultant level set formulation is
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 32
( , )
( ( ) ( ) ( ))
n
n b n S n n
CT
d x t
R R R
dt
|
o | | | | | = + + V (6)
where
( ) ( , ( )) ( , ( ))
n
CT in in out out
R D p p x D p p x | = + (7)
( ) ( ( )) . ( ( ))
b n O O
R g B x g B x
|
|
|
(
V
= +V
(
V
(
(8)
0
( ) ( )
S n
R x | | = (9)
The numerical implementation of eq.6 is computed
using narrowband algorithm [32]. The algorithm
approximates all the derivatives in eq.6 using finite
differences. The level set function is reinitialized when the
zero level set clutches the boundary of the object in the
image frame.
IV. FEATURE MATRIX
The feature matrix
Mat
f derived from a video sequence
is a fusion of hand and head segments representing shapes
in each frame along with their location in the frame. The
shape information for an n
th
frame is present
n
| which is a
binary matrix equal to frame size. Tracking active contour
results in location of hands and head contours in each frame
giving their location
( ) ( )
( , )
n n
x y values. For an n
th
frame in
the video sequence, the first row of feature vector
vect
f
consists of pixel values with the shape of active
contour i.e. the pixels representing segmented head and
hand shapes. The second and third row consists of
( ) ( )
( , )
n n
x y
location information of those pixels that are
segmented. The feature vector for each frame is a three
dimensional vector
vect
f
representing shape and location
information about each segmented hand and head contours.
For a entire video in a sign language recognition system,
each
vect
f
of three dimension becomes a
Mat
f
feature
matrix.
Temporal pooling is engaged to reduce the
dimensionality of the feature vector for a particular video
sequence. Averaging on each row of the
Mat
f
with respect
to number of pixels in a frame will leave us with a new
reduced feature vector
Nvect
f
which uniquely represents a
particular video sequence. Finally each row in the new
feature matrix
NMat
f
consists of feature vector representing
each sign video sequence, stored in the database as
templates.
V. FUZZY INFERENCE SYSTEM (FIS)
For pattern classification we considered Takagi-sugeno-
kang (TSK) or simply sugeno type Fuuzy inference system
because the output membership functions are linear or
constsnt. Sugeno fuzzy inference system consists of five
steps, fuzzification of input variables, applying fuzzy and
or or operator, calculating the rule weights, calculating
the output level and finally defuzzification. Many methods
are proposed to generate fuzzy rule base. The basic idea is
to study and generate the optimum rules needed to control
the input without compromising the quality of control. In
this paper the generation of fuzzy rule base is done by
subtractive clustering technique in sugeno fuzzy method
for classification video. Cluster center found in the
training data are points in the feature space whose
neighborhood maps into the given class. Each cluster
center is translated into a fuzzy rule for identifying the
class. A generalized type-I TSK model can be described
by fuzzy IF-THEN rules which represent input output
relations of a system. For multi input single output first
order type-I TSK can be expressed as
IF xi is Q
lk
and x
2
is Q
2k
and ... and x
n
is Q
nk
,
THEN Z is
0 1 1 2 2
........
n n
w p p p p _ _ _ = + + + +
(10)
Where x
1
,x
2
. x
n
and Z are linguistic variables;
Q
1k,
Q
2k
and Q
nk
are the fuzzy sets on universe of
discourses U.,V . and W, and p
0
,p
1
,p
n
are regression
parameters.
With subtractive clustering method, X
j
is the j
th
input
feature x
j
( j
e
[1, n] ), and Q
jk
is the MF in the k
th
rule
associated with j
th
input feature. The MF Q
jk
can be
obtained as
2
1
[ ( ) ]
2
j jk
X X
jk
Q e
o
=
(11)
Where x
jk
is the j
th
input feature of x
k
, the standard
deviation
o
of Gaussian MF given as
1
2a
o =
(12)
VI. RESULTS
In the first experiment we started with a video
sequence which is shot in a lab using web cam with dark
background and with an additional constraint that signer
should also wear a dark shirt. This video sequence is part
of the database we have created for sign language
recognition project. Our Sign language database consists
of 351 signs with 8 different signers. The frame size of
the 320 480 Fig. 2 shows where we run our
segmentation and tracking algorithm with values of
0.22, 0.47 and 0.2 , q _ = = = The object and
background clusters are made of three and two clusters.
The experiments are performed in R color plane. As
such we can do it any color plane or with color videos.
The problem with full color sequences pertaining to sign
language is that sign language videos contain large
sequence of frames with lot of information to be
extracted. Fig. 2(a) shows four frames from a video
sequence of the signer performing a sign related to
English alphabet X. This simple sign contain 181
frames. Fig. 2(b) shows the results obtained from our
proposed method. The inclusion of prior shape term in
the level sets segments that the right finger shape in spite
of being blocked by the finger from left hand. This
segmentation and tracking result will help in good sign
recognition. Fig. 2(b) and 2(c) shows the effectiveness
of the proposed algorithm against the Chan-Vese (CV)
model in [33].
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 33
Figure 2. Experiment one showing our proposed segmentation algorithm on sign language videos under laboratory conditions. Frames 10, 24, 59,80
are shown. Row (a) shows four original frames. Row (b) shows the results from proposed algorithm and Row (c) Shows results of CV algorithm in
[33].
We also experimented with more real time scenarios
such usage of sign language in offices or colleges, so
that sign language recognition system can be
implemented under real time. The video sequence that is
considered is taken in a room where due to less cabin
space the signer hands cover the face of the signer in
most of the occasions. Hence it is difficult to segment
and track the hands or the face of the signer. For this
image sequence we have manually extracted the signers
hands and head portions from the first frame
(1)
I which
is used to initialize the proposed level set. The weighing
parameters in eq.27 0.12, 0.25, =0.66 o | = = , we
observed that segmentation is good if shape term in eq.6
weight is increased. Because in this real time video the
color and texture information does not reveal much of
information. Similarly the boundary information also
provides insufficient data under the influence of such a
background clutter. Fig. 3 Shows the results of tracking
in the above discussed scenario. Tracking error plot
shows our method tracks good in real time environments
compared to method in [33].
Figure 3. Experiment Shows segmentation and tracking in closed room with cluttered background. (a) Original video sequence of frames 120,
122,125,128, (b) Segmentation and Tracking using method in [33] (c) Segmentation and Tracking using proposed method.
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 34
Classification of different gestures is done using
Fuzzy inference system for 351 different gestures of
Indian sign language by 9 different signers. Table I gives
details of the fuzzy inference system used for gesture
classification. The performance of the system is
evaluated based on its ability to correctly classify signs
to their corresponding speech class. The recognition rate
is defined as the ratio of the number of correctly
classified signs to the total number of signs:
Re (%) 100
Perfectly Classified Signs
cognition Rate
Total Signs Used
=
The total number of signs used for testing is 351
from 10 different signers and the system recognition rate
is close to 96%. The system was implemented with
MATLAB version 7.0.1.
Table I. Details of fuzzy inference system used for gesture
classification.
Fuzzy Model Parameters Method
Name 'fis_inslr'
Type sugeno'
And Method 'min'
Or Method 'max'
Defuzz method 'wtaver'
Imp Method 'prod'
Agg Method 'sum'
Input [1x80 struct]
Output [1x1 struct]
Rule [1x25 struct]
Classification of different gestures is done using
Fuzzy inference system A graphical User Interface
(GUI) has been created to automatically train and
recognize the gestures as shown in the fig. 4 and fig.
5.The GUI has two parts, a training part and a
recognition part. Training is used to train new signs and
store them in the data base of sign language system.
Recognition tries to recognize the trained videos along
with unknown videos of different signers. Training
consists of four processes that can be activated by the
use of buttons Load Video, Extract Features, Save
Features along with the text in the text box and finally
train button to finish the training. View FIS shows the
user fuzzy inference system used. Once the load video
button is pressed the video is played on top portion of
the training side which is interfaced through Microsoft
media player.
Figure 4. Demo of Gesture sign FIVE with signer under
complex background.
Figure 5. Testing Demo of Gesture sign FIVE with a
different signer with simple background.
VII. CONCLUSIONS AND FUTURE WORK
Our proposed techniques try to make the sign
language recognition system a close reality. The method
proposed combines effectively the color, texture,
boundary and prior shape information to produce an
effective video segmentation and tracking of sign
language videos under various harsh environments such
as cluttered backgrounds, poor lighting, fast moving
objects and occlusions. The color and texture information
is extracted statistically by creating a feature vector and
classifying each pixel in the frame to object and
background pixel. Boundary information is provided by
the divergence operator along with the curvature of the
object under consideration. Including Shape information
from the previous frame did a whole lot of difference to
the level set minimization to segment correctly and track
effectively the occulted hand from other hand and also
head some times. We have effectively demonstrated by
experimentation of the proposed method by applying it to
video sequences under various conditions. Nevertheless
there are challenges which are to be addressed to apply
this method to continuous sign language recognition
systems to carry out the recognition in real time. The
recognition rate of the overall sign language recognition
system is 96% which is a good score for our proposed
real time system.
VIII. REFERENCES
[1] M.K Bhuyan, D. Ghoah and P.K. Bora (2006), A
Framework for Hand Gesture Recognition with
[2] I. M. Mendel, Generating fuzzy rules by learning
from examples, IEEE Trans. Syst., Man, Cyben.,
vol. 22, no. 6, pp. 1414-1427, 1992.
[3] Allili, M.S., Ziou, D.,(2006), Automatic color-
texture image segmentation by using active
contours. In: Proceedings of 1st IEEE International
Workshop on Intelligent Computing in Pattern
Analysis/Synthesis, Xian, China, 2627, LNCS
4153, pp. 495504.
[4] S. Allam, M. Adel, P. Refregier, Fast algorithm for
texture discrimination by use of a separable
orthonormal decomposition of the co-occurrence
matrix, Applied Optics, vol.36, 1997, pp.8313
8321.
[5] R. M. Haralick, K. Shangmugam, I. Dinstein, (1973)
Textural Feature for Image Classification, IEEE
Trans on Systems, Man, Cybernetics, 3(6), pp.610
621.
Volume 2, Issue 6, June 2012 www.ijarcsse.com
2012, IJARCSSE All Rights Reserved Page | 35
[6] Allili, M.S., Ziou, D.: Automatic color-texture
image segmentation by using active contours. In:
Proceedings of 1st IEEE International Workshop on
Intelligent Computing in Pattern Analysis/Synthesis,
Xian, China, 2627, August 2006, LNCS 4153, pp.
495504.
[7] Ketut Fundana Niels C. Overgaard Anders
Heyden,(2008), Variational Segmentation of
Image Sequences Using Region-Based Active
Contours and Deformable Shape Priors Int J
Comput Vis vol.80: pp289299.
[8] T. Chan and L. Vese(2001) Active contours without
edges. IEEE Transations on Image Processing,Vol.
10 No.2,pp266-277.
[9] J. Mackie ,B. McCane, Finger Detection with
Decision Trees, University of Otago, Department
of Computer Science.
[10] Claudia Nolker, Helge Ritter, Detection of
Fingertips in Human Hand Movement Sequences,
Gesture and Sign Language in Human-Computer
Interaction, Proceedings of the International Gesture
Workshop, Published by Springer, 1997, pp. 209-
218.
[11] E. Stergiopoulou, N. Papamarkos, Hand gesture
recognition using a neural network shape fitting
technique, Engineering Applications of Artificial
Intelligence (ELSEVIER), vol. 22,pp.11411158,
2009, doi: 10.1016/j.engappai.2009.03.008.
[12] Mehdi, S.A.; Khan, Y.N. Sign language
recognition using sensor gloves Proceedings of the
9th International Conference on Neural Information
Processing, 2002. ICONIP '02. Volume 5, pp18-22,
Nov. 2002.
[13] W.Kadous. Recognition of Australian Sign language
using instrumented glove. Master Thesis. University
of New South Wales. October 1995.
[14] Tan Tian Swee, A.K. Ariff, Sh-Hussain. Salleh,
Siew Kean Seng, and Leong Seng Huat, Wireless
Data Gloves Malay Sign Language Recognition
System Proceedings of the international conference
on Information and computing Systems, 2007,
ICICS07,pp56-59.
[15] D. Terzopoulos and K. Fleischer (1988)
Deformable models. The Visual Computer, Vol.4
No.6, pp306-331.
[16] D. Terzopoulos, J. Platt, A. Barr, and K. Fleischer.(
1987) Elastically deformable models In
Comp.Graphics Proc., pages 205-214. ACM Press/
ACM SIGGRAPH.
[17] Osher, S., Sethian, J. (1988) Fronts propagating with
curvature-dependant speed: algorithms based on
Hammilton-Jacobi formulations.J. Comput. Phys.
Vol.79 No.1, pp1249.
[18] L. Brkthes, P. Menezes, E Lerasle and J. Hayet
Face tracking and hand gesture recognition for
human-robot interaction Pmcwdingr of the 2004
IEEE InternatIona1 Confennee on RobotIco 6
Automation New Orleans. April 2004.
[19] Mansouri.A.R, Region tracking via level set pdes
without motion computation. IEEE Trans. Pattern
Anal. Mach. Intell. 2002, Vol.24, no.7, 947961.
[20] Jehan-Besson, S, Barlaud, M.,Aubert,G.: Detection
and tracking of moving objects using a new level set
based method. Proceedings of IEEE International
Conference on Pattern Recognition, Barcelona,
Spain, 38 September, 2000, pp. 71127117.
[21] Newby, G. (1993). Gesture recognition using
statistical similarity. In Proceedings of virtual reality
and persons with disabilities.
[22] Birk, H., Moeslund, T. B., & Madsen, C. B. (1997).
Real-time recognition of hand alphabet gestures
using principal component analysis. In Proceedings
of the 10th Scandinavian conference on image
analysis.
[23] Rangarajan, K., & Shah, M. (1991). Establishing
motion correspondence. CVGIP: Image
Understanding, 54, 5673.
[24] M. Sugeno, An introductory survey of fuzzy
control, Inform. Sci., vol. 36, pp. 59-83, 1985.
[25] C. C. Lee, Fuzzy logic in control systems: Fuzzy
logic controller-Part-I and Part-II,IEEE Trans.
Syst., Man, Cybem., vol. 20, no. 2, pp. 404-435,
1990.
[26] T. Takagi and M. Sugeno, Fuzzy identification of
systems and its applications to modeling and
control, IEEE Trans. Syst., Man, cybern., vol. 15,
no. 1, pp. 116-132, 1985.
[27] L. X. Wang and I. M. Mendel, Generating fuzzy
rules by learning from examples, IEEE Trans.
Syst., Man, Cyben., vol. 22, no. 6, pp. 1414-1427,
1992.
[28] Allili, M.S., Ziou, D.,(2006), Automatic color-
texture image segmentation by using active
contours. In: Proceedings of 1st IEEE International
Workshop on Intelligent Computing in Pattern
Analysis/Synthesis, Xian, China, 2627, LNCS
4153, pp. 495504.
[29] S. Allam, M. Adel, P. Refregier, Fast algorithm for
texture discrimination by use of a separable
orthonormal decomposition of the co-occurrence
matrix, Applied Optics, vol.36, 1997, pp.8313
8321.
[30] R. M. Haralick, K. Shangmugam, I. Dinstein, (1973)
Textural Feature for Image Classification, IEEE
Trans on Systems, Man, Cybernetics, 3(6), pp.610
621.
[31] Allili, M.S., Ziou, D.: Automatic color-texture
image segmentation by using active contours. In:
Proceedings of 1st IEEE International Workshop on
Intelligent Computing in Pattern Analysis/Synthesis,
Xian, China, 2627, August 2006, LNCS 4153, pp.
495504.
[32] Ketut Fundana Niels C. Overgaard Anders
Heyden,(2008), Variational Segmentation of
Image Sequences Using Region-Based Active
Contours and Deformable Shape Priors Int J
Comput Vis vol.80: pp289299.
[33] T. Chan and L. Vese(2001) Active contours without
edges. IEEE Transations on Image Processing,Vol.
10 No.2,pp266-277.
You might also like
- Paper 8-Segment, Track, Extract, Recognize and Convert Sign Language Videos To VoiceTextDocument13 pagesPaper 8-Segment, Track, Extract, Recognize and Convert Sign Language Videos To VoiceTextEditor IJACSANo ratings yet
- A Survey On Sign Language Recognition With Efficient Hand Gesture RepresentationDocument7 pagesA Survey On Sign Language Recognition With Efficient Hand Gesture RepresentationIJRASETPublicationsNo ratings yet
- Improve The Recognition Accuracy of Sign Language GestureDocument7 pagesImprove The Recognition Accuracy of Sign Language GestureIJRASETPublicationsNo ratings yet
- Conversion of Sign Language Video To Text andDocument8 pagesConversion of Sign Language Video To Text andIJRASETPublicationsNo ratings yet
- "Asl To Text Conversion": Bachelor of TechnologyDocument15 pages"Asl To Text Conversion": Bachelor of TechnologyGurudev YankanchiNo ratings yet
- Sign Language Recognition and Converting Into TextDocument8 pagesSign Language Recognition and Converting Into TextIJRASETPublicationsNo ratings yet
- Sign Language Detection Using CNNDocument5 pagesSign Language Detection Using CNNIJRASETPublicationsNo ratings yet
- Real Time Sign Language Recognition System For Hearing and Speech Impaired PeopleDocument9 pagesReal Time Sign Language Recognition System For Hearing and Speech Impaired PeopleIJRASETPublicationsNo ratings yet
- A Survey On Real Time Sign Language Detector Using MLDocument11 pagesA Survey On Real Time Sign Language Detector Using MLIJRASETPublicationsNo ratings yet
- Sign Language Recognition Using Machine LearningDocument7 pagesSign Language Recognition Using Machine LearningIJRASETPublicationsNo ratings yet
- Implementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowDocument4 pagesImplementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowIJRASETPublicationsNo ratings yet
- Multi-Lingual Sign Language Detection SystemDocument5 pagesMulti-Lingual Sign Language Detection SystemIJRASETPublicationsNo ratings yet
- Finger Motion Capture For Sign Language InterpretationDocument11 pagesFinger Motion Capture For Sign Language InterpretationIJRASETPublicationsNo ratings yet
- Ijet V1i5p9 PDFDocument6 pagesIjet V1i5p9 PDFInternational Journal of Engineering and TechniquesNo ratings yet
- A Sign Language Convention Using YOLOv5 UpdatdDocument5 pagesA Sign Language Convention Using YOLOv5 Updatdwadaskarsahil718No ratings yet
- Sign Language DetectionDocument5 pagesSign Language DetectionPranay ParekarNo ratings yet
- Two Way Indian Sign Language Translator Using LSTM and NLPDocument8 pagesTwo Way Indian Sign Language Translator Using LSTM and NLPIJRASETPublicationsNo ratings yet
- Selfie Video Based Continuous Indian Sign Language Recognition System PDFDocument11 pagesSelfie Video Based Continuous Indian Sign Language Recognition System PDFShrusti SavantNo ratings yet
- Sign Language Gesture Recognition (17A09) : Presented by Guided by S.AVINASH (17CSR013) S.BALAJI (17CSR015)Document8 pagesSign Language Gesture Recognition (17A09) : Presented by Guided by S.AVINASH (17CSR013) S.BALAJI (17CSR015)Deepak SubramaniamNo ratings yet
- Orange and Black Illustration International Day of Sign Languages Instagram Post - RA078Document12 pagesOrange and Black Illustration International Day of Sign Languages Instagram Post - RA078Cubic SectionNo ratings yet
- Deaf and Dumb Gesture Recognition SystemDocument7 pagesDeaf and Dumb Gesture Recognition SystemIJRASETPublicationsNo ratings yet
- Real-Time Indian Sign Language (ISL) Recognition: Kartik Shenoy, Tejas Dastane, Varun Rao, Devendra VyavaharkarDocument9 pagesReal-Time Indian Sign Language (ISL) Recognition: Kartik Shenoy, Tejas Dastane, Varun Rao, Devendra VyavaharkarDudeyes PerfectNo ratings yet
- Review On Hand Gesture RecognitionDocument5 pagesReview On Hand Gesture RecognitiondbpublicationsNo ratings yet
- A Survey Paper On Sign Language RecognitionDocument6 pagesA Survey Paper On Sign Language RecognitionIJRASETPublicationsNo ratings yet
- Neural Network Based Static Hand Gesture RecognitionDocument5 pagesNeural Network Based Static Hand Gesture RecognitionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Research Paper PBL Group-II (A-2)Document4 pagesResearch Paper PBL Group-II (A-2)wadaskarsahil718No ratings yet
- Indian Sign Language Gesture ClassificationDocument22 pagesIndian Sign Language Gesture ClassificationVkg Gpta100% (2)
- Sign Language Detection With CNNDocument6 pagesSign Language Detection With CNNIJRASETPublicationsNo ratings yet
- Gesture Language Translator Using Raspberry PiDocument7 pagesGesture Language Translator Using Raspberry PiIJRASETPublicationsNo ratings yet
- Sign Language Recognition SystemDocument4 pagesSign Language Recognition SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Machine Learning and Ai (Eaepcpc09) : Project: Sign Language RecognitionDocument20 pagesMachine Learning and Ai (Eaepcpc09) : Project: Sign Language RecognitionPragyadityaNo ratings yet
- Applied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangDocument10 pagesApplied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangFriji RachaNo ratings yet
- Research 6Document10 pagesResearch 6Deepak SubramaniamNo ratings yet
- Handwritten Character RecognitionDocument22 pagesHandwritten Character RecognitionIJRASETPublicationsNo ratings yet
- Advanced Deep Learning Framework For Real-Time Hand Gesture Recognition in Human-Computer InteractionDocument9 pagesAdvanced Deep Learning Framework For Real-Time Hand Gesture Recognition in Human-Computer InteractionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligent Sign Language Recognition Using ImageDocument8 pagesIntelligent Sign Language Recognition Using ImageECE Department at SBCENo ratings yet
- Indian Sign Language Converter System Using An Android App.: Pranali Loke Juilee Paranjpe Sayli BhabalDocument4 pagesIndian Sign Language Converter System Using An Android App.: Pranali Loke Juilee Paranjpe Sayli BhabalGurudev YankanchiNo ratings yet
- Realtime Sign Language Gesture Word Recognition From Video Seque 2018Document10 pagesRealtime Sign Language Gesture Word Recognition From Video Seque 2018Ridwan EinsteinsNo ratings yet
- Real Time Object Detection With Audio Feedback Using Yolo v3Document4 pagesReal Time Object Detection With Audio Feedback Using Yolo v3Editor IJTSRDNo ratings yet
- A Survey Paper On Sign Language Recognition System Using OpenCV and Convolutional Neural NetworkDocument7 pagesA Survey Paper On Sign Language Recognition System Using OpenCV and Convolutional Neural NetworkIJRASETPublicationsNo ratings yet
- Sign Language Recognition SystemDocument7 pagesSign Language Recognition SystemIJRASETPublicationsNo ratings yet
- A Review On The Perception and Recognition Systems For Interpreting Sign Languages Used by Deaf and MuteDocument6 pagesA Review On The Perception and Recognition Systems For Interpreting Sign Languages Used by Deaf and MuteVIVA-TECH IJRINo ratings yet
- Text Writing in AirDocument19 pagesText Writing in AirGaurav SharmaNo ratings yet
- Sign Language TranslationDocument23 pagesSign Language Translation陳子彤No ratings yet
- Artificial Intelligence Based Mobile RobotDocument19 pagesArtificial Intelligence Based Mobile RobotIJRASETPublicationsNo ratings yet
- Real Time Sign Language DetectionDocument6 pagesReal Time Sign Language DetectionIJRASETPublicationsNo ratings yet
- Sign Language Detection Using Hand GesturesDocument10 pagesSign Language Detection Using Hand GesturesIJRASETPublicationsNo ratings yet
- Suspicious Human Activity Recognition and Alarming SystemDocument11 pagesSuspicious Human Activity Recognition and Alarming SystemIJRASETPublicationsNo ratings yet
- Static Sign Language Recognition Using Deep LearningDocument9 pagesStatic Sign Language Recognition Using Deep LearningMelissa MokNo ratings yet
- Applied Sciences: Real-Time Hand Gesture Recognition Based On Deep Learning Yolov3 ModelDocument15 pagesApplied Sciences: Real-Time Hand Gesture Recognition Based On Deep Learning Yolov3 ModelYogesh BirajdarNo ratings yet
- Paper 9004Document4 pagesPaper 9004IJARSCT JournalNo ratings yet
- File TraceDocument4 pagesFile TraceJaimito MoralesNo ratings yet
- A Survey On Machine Learning Based Techniques For Sign Language Translation SystemDocument9 pagesA Survey On Machine Learning Based Techniques For Sign Language Translation SystemIJRASETPublicationsNo ratings yet
- 2017project PaperDocument5 pages2017project PaperÂjáyNo ratings yet
- SSRN Id3421567Document9 pagesSSRN Id3421567mirkena teshaleNo ratings yet
- Implementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleDocument15 pagesImplementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleSanjay ShelarNo ratings yet
- PID4545123Document5 pagesPID4545123VitthalNo ratings yet
- Sign Languages - RA078Document13 pagesSign Languages - RA078Cubic SectionNo ratings yet
- Optical Braille Recognition: Empowering Accessibility Through Visual IntelligenceFrom EverandOptical Braille Recognition: Empowering Accessibility Through Visual IntelligenceNo ratings yet
- Target Classification: An Application of Artificial Neural Network in Intelligent Transport SystemDocument4 pagesTarget Classification: An Application of Artificial Neural Network in Intelligent Transport Systemeditor_ijarcsseNo ratings yet
- Performance Analysis of Conventional Diversity Combining Schemes in Rayleigh Fading ChannelDocument4 pagesPerformance Analysis of Conventional Diversity Combining Schemes in Rayleigh Fading Channeleditor_ijarcsseNo ratings yet
- Simulink Model Based Image SegmentationDocument4 pagesSimulink Model Based Image Segmentationeditor_ijarcsseNo ratings yet
- Optimizing Delay in Peer To Peer Live Video StreamingDocument4 pagesOptimizing Delay in Peer To Peer Live Video Streamingeditor_ijarcsseNo ratings yet
- Impact and Utilization of Wireless Sensor Network in Rural Area For Health CareDocument6 pagesImpact and Utilization of Wireless Sensor Network in Rural Area For Health Careeditor_ijarcsseNo ratings yet
- V2I600131Document6 pagesV2I600131editor_ijarcsseNo ratings yet
- An Algorithm For Crypto Analysis in ManetDocument4 pagesAn Algorithm For Crypto Analysis in Maneteditor_ijarcsseNo ratings yet
- A Review of Various Grid Middleware TechnologiesDocument6 pagesA Review of Various Grid Middleware Technologieseditor_ijarcsseNo ratings yet
- Key Distillation Process On Quantum Cryptography Protocols in Network SecurityDocument6 pagesKey Distillation Process On Quantum Cryptography Protocols in Network Securityeditor_ijarcsseNo ratings yet
- Performance Analysis of WDM/SCM System Using EDFADocument5 pagesPerformance Analysis of WDM/SCM System Using EDFAeditor_ijarcsseNo ratings yet
- Knowledge Sharing Using Ontology-A Date Palm ModelDocument6 pagesKnowledge Sharing Using Ontology-A Date Palm Modeleditor_ijarcsseNo ratings yet
- A Survey On Personalized Meta Search EngineDocument4 pagesA Survey On Personalized Meta Search Engineeditor_ijarcsseNo ratings yet
- Fingerprint Recognition Using Robust Local FeaturesDocument5 pagesFingerprint Recognition Using Robust Local Featureseditor_ijarcsseNo ratings yet
- V2I300142Document3 pagesV2I300142editor_ijarcsseNo ratings yet
- Multi-Objective Approach For Software Module ClusteringDocument6 pagesMulti-Objective Approach For Software Module Clusteringeditor_ijarcsseNo ratings yet
- An Evaluation of Weak State Mechanism For Large-Scale Dynamic NetworksDocument5 pagesAn Evaluation of Weak State Mechanism For Large-Scale Dynamic Networkseditor_ijarcsseNo ratings yet
- SCTP Protocol Reviews and Performance in Ad-Hoc Multi-Homed NetworksDocument7 pagesSCTP Protocol Reviews and Performance in Ad-Hoc Multi-Homed Networkseditor_ijarcsseNo ratings yet
- Whatsapp Software Requirement Specification SrsDocument16 pagesWhatsapp Software Requirement Specification Srscandy ramosNo ratings yet
- GDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFDocument8 pagesGDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFdagushNo ratings yet
- Liferay Custom SQL Example - Pro LiferayDocument8 pagesLiferay Custom SQL Example - Pro LiferaySiAgam DevinfoNo ratings yet
- RAS FEaturesDocument53 pagesRAS FEaturesbogdanffNo ratings yet
- How To Convert VMX Images To ESX SERVER ImagesDocument2 pagesHow To Convert VMX Images To ESX SERVER ImagesUma Mahesh.GNo ratings yet
- Ramchandra Corejava NewDocument569 pagesRamchandra Corejava NewPrasad Baithi67% (3)
- Introduction To OOAD - L1Document20 pagesIntroduction To OOAD - L1surabhi_kanaujiaNo ratings yet
- Using Zend Framework 2Document414 pagesUsing Zend Framework 2EdNo ratings yet
- Using The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesDocument15 pagesUsing The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesJames Head50% (2)
- Asset Tool-GsmDocument178 pagesAsset Tool-Gsmtienpq150987No ratings yet
- Installation of Tally - Erp 9 Multi UserDocument8 pagesInstallation of Tally - Erp 9 Multi UserTaher Hunaid JaorawalaNo ratings yet
- H6 SD LogDocument17 pagesH6 SD LogRodrigoBaptistaNo ratings yet
- Oceanspace S2600 Data SheetDocument4 pagesOceanspace S2600 Data SheetUtopia MediaNo ratings yet
- Notes On The Plan 9 Kernel Source, 3rd EditionDocument328 pagesNotes On The Plan 9 Kernel Source, 3rd EditionblackownedNo ratings yet
- Very Short Intro To Assembly Language ProgrammingDocument26 pagesVery Short Intro To Assembly Language Programmingashis_biswasNo ratings yet
- Chapter 4 - Syntax AnalysisDocument82 pagesChapter 4 - Syntax AnalysisVinay DubasiNo ratings yet
- Exam Cell Automation ProjectDocument17 pagesExam Cell Automation Projectanimesh0% (1)
- User Manual: Version 0.9.9.z.58 BETA III August 09, 2018Document34 pagesUser Manual: Version 0.9.9.z.58 BETA III August 09, 2018vfdbdfbdfNo ratings yet
- (5-4) 808D Function Manual 1212 en en-US (208-286) PDFDocument79 pages(5-4) 808D Function Manual 1212 en en-US (208-286) PDFIRINEO AVALOS MEJIANo ratings yet
- 08 - Retrieving SQL Metadata and Improving SQL PerformanceDocument35 pages08 - Retrieving SQL Metadata and Improving SQL PerformanceChowdhury Golam KibriaNo ratings yet
- Assignment - IA Linked Lists SolutionsDocument8 pagesAssignment - IA Linked Lists SolutionsVikalp HandaNo ratings yet
- Implementation of Uart Using Systemc and Fpga Based Co-Design MethodologyDocument7 pagesImplementation of Uart Using Systemc and Fpga Based Co-Design MethodologyRakeshconclaveNo ratings yet
- A Greedy AlgorithmDocument8 pagesA Greedy AlgorithmbillpetrrieNo ratings yet
- Lecture On SQLDocument78 pagesLecture On SQLEr Saroj WagleNo ratings yet
- Waa Kpi Definitions 1 0Document14 pagesWaa Kpi Definitions 1 0buleydotbizNo ratings yet
- FD Controller Instruction Manual Basic Operations Manual: 6th EditionDocument276 pagesFD Controller Instruction Manual Basic Operations Manual: 6th EditionPhasin ChitutsahaNo ratings yet
- Synopsis of Term Work Based On Obstacle Avoidance in Robots: Guru Gobind Singh Indraprastha University Dwarka Sec-16Document7 pagesSynopsis of Term Work Based On Obstacle Avoidance in Robots: Guru Gobind Singh Indraprastha University Dwarka Sec-16Rahul SaraswatNo ratings yet
- The Ultimate Network Security ChecklistDocument13 pagesThe Ultimate Network Security ChecklistdeewanandNo ratings yet
- Oracle Technical Interview Questions For An Oracle DBADocument16 pagesOracle Technical Interview Questions For An Oracle DBApapusahaNo ratings yet
- 2344 1101 Zensar Placement Paper A Interview QuestionsDocument1 page2344 1101 Zensar Placement Paper A Interview Questionsmayank7410% (1)