You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Servant LeadershipDocument7 pagesThe Servant Leadershipnavkar_centreforskills100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Two-Way Anova Using SPSSDocument13 pagesTwo-Way Anova Using SPSSssheldon_222No ratings yet
- Type 1 and Type 3 SS M&D TablesDocument2 pagesType 1 and Type 3 SS M&D Tablesssheldon_222No ratings yet
- Formulae For Calculating IDI and NRIDocument8 pagesFormulae For Calculating IDI and NRIssheldon_222No ratings yet
- The Distinction Between Fixed and Random EffectsDocument6 pagesThe Distinction Between Fixed and Random Effectsssheldon_222No ratings yet
- Two-Way Mixed Effects ModelsDocument6 pagesTwo-Way Mixed Effects Modelsssheldon_222No ratings yet
- History of Neurological Contributions in The Swiss Archives of Neurology and PsychiatryDocument14 pagesHistory of Neurological Contributions in The Swiss Archives of Neurology and Psychiatryssheldon_222No ratings yet
- Equations For Linear RegressionDocument3 pagesEquations For Linear Regressionssheldon_222No ratings yet
- Ordinary Least Squares Regression and Regression DiagnosticsDocument73 pagesOrdinary Least Squares Regression and Regression Diagnosticsssheldon_222No ratings yet
- TableA3 Bonferoni F DistributionDocument1 pageTableA3 Bonferoni F Distributionssheldon_222No ratings yet
- Summary of Four Mixed-Model ApproachesDocument2 pagesSummary of Four Mixed-Model Approachesssheldon_222No ratings yet
- The Concepts of Linear Dependence - Independence and OrthogonalityDocument6 pagesThe Concepts of Linear Dependence - Independence and Orthogonalityssheldon_222No ratings yet
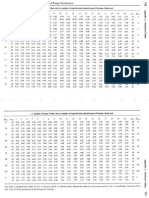
- TableA4 StudentizedRangeDistributionDocument1 pageTableA4 StudentizedRangeDistributionssheldon_222No ratings yet
- Sum of Squares & DFs For Each Effect in A Split-Plot DesignDocument1 pageSum of Squares & DFs For Each Effect in A Split-Plot Designssheldon_222No ratings yet
- Some Multiple Comparison Procedures III - Tukey HSD and Scheffe TestsDocument11 pagesSome Multiple Comparison Procedures III - Tukey HSD and Scheffe Testsssheldon_222No ratings yet
- Lecture Numerical OptimizationDocument22 pagesLecture Numerical Optimizationssheldon_222No ratings yet
- Sum of Squares and Degrees of Freedom For Each Effect in A Two-Way Within-Subjects DesigDocument1 pageSum of Squares and Degrees of Freedom For Each Effect in A Two-Way Within-Subjects Desigssheldon_222No ratings yet
- Some Multiple Comparison Procedures II - Bonferroni and Related ApproachesDocument7 pagesSome Multiple Comparison Procedures II - Bonferroni and Related Approachesssheldon_222No ratings yet
- Refcard RmsDocument2 pagesRefcard Rmsssheldon_222No ratings yet
- R Refcard RegressionDocument6 pagesR Refcard Regressionshadydogv5No ratings yet
- Some Multiple Comparison Procedures I - Fisher LSD TestDocument4 pagesSome Multiple Comparison Procedures I - Fisher LSD Testssheldon_222No ratings yet
- Counts & Proportions-Logistic and Log-Linear ModelsDocument58 pagesCounts & Proportions-Logistic and Log-Linear Modelsssheldon_222No ratings yet
- ARVO PresentationDocument45 pagesARVO Presentationssheldon_222No ratings yet
- Presentation - R Package eRMDocument40 pagesPresentation - R Package eRMssheldon_222100% (1)
- Sudoku SolverDocument1 pageSudoku SolveriPakistan100% (15)
- Honolulu SNRP 4-18-2008Document44 pagesHonolulu SNRP 4-18-2008ssheldon_222No ratings yet
- Quntification of Brain Morphometry and Anatomical Change in NeonatesDocument44 pagesQuntification of Brain Morphometry and Anatomical Change in Neonatesssheldon_222No ratings yet
- Mpeg-1 11172-1Document46 pagesMpeg-1 11172-1Hana HoubaNo ratings yet
- International Baccalaureate ProgrammeDocument5 pagesInternational Baccalaureate Programmeapi-280508830No ratings yet
- Problem Sheet V - ANOVADocument5 pagesProblem Sheet V - ANOVARuchiMuchhalaNo ratings yet
- High TechDocument4 pagesHigh TechDannySP10100% (1)
- Quarter 1 Science 4 Activity Sheet No. 6Document2 pagesQuarter 1 Science 4 Activity Sheet No. 6karol melendezNo ratings yet
- Radcliffe Brown - Evans-PritchardDocument2 pagesRadcliffe Brown - Evans-PritchardAnonymous iHg3ImRaXDNo ratings yet
- Web Security Unit 6 Notes PDFDocument24 pagesWeb Security Unit 6 Notes PDFMohd FareeduddinNo ratings yet
- SQL NotesDocument42 pagesSQL NoteskumarNo ratings yet
- Test Strategy TemplateDocument26 pagesTest Strategy TemplateCola RichmondNo ratings yet
- Intelligent Control LED Integrated Light Source: Features and BenefitsDocument6 pagesIntelligent Control LED Integrated Light Source: Features and BenefitsRazvy StoianNo ratings yet
- Course Outline in Grade 1 MathematicsDocument3 pagesCourse Outline in Grade 1 MathematicsRoselyn GutasNo ratings yet
- Thiết bị hiệu chuẩn BeamexDocument116 pagesThiết bị hiệu chuẩn BeamexLe Thanh DuyNo ratings yet
- Mini Fellowship Program OutlineDocument4 pagesMini Fellowship Program OutlineVijayraj GohilNo ratings yet
- Script PDFDocument14 pagesScript PDFSachin SaraswatiNo ratings yet
- Informatica Certification Prep ListDocument5 pagesInformatica Certification Prep ListRabindra P.SinghNo ratings yet
- Facebook Romanian Translation Style GuideDocument20 pagesFacebook Romanian Translation Style GuideLeonNo ratings yet
- Block 7Document15 pagesBlock 7api-3703652No ratings yet
- Summative Test English 8Document2 pagesSummative Test English 8Cristina SarmientoNo ratings yet
- Prizm Programming GuideDocument168 pagesPrizm Programming GuideBucur MateiNo ratings yet
- Autoliv LeanDocument50 pagesAutoliv LeanRajasekaran Murugan100% (1)
- Math - MAA Problem Series List PDFDocument2 pagesMath - MAA Problem Series List PDFadasdNo ratings yet
- Ward Wise Officers ListDocument8 pagesWard Wise Officers ListprabsssNo ratings yet
- Assignment Gravity and MotionDocument23 pagesAssignment Gravity and MotionRahim HaininNo ratings yet
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmDocument1 pageOptimization Module For Abaqus/CAE Based On Genetic AlgorithmSIMULIACorpNo ratings yet
- Kriging InterpolationDocument49 pagesKriging InterpolationJimmy MaharadjaNo ratings yet
- JD of HSE LO MD Abdullah Al ZamanDocument2 pagesJD of HSE LO MD Abdullah Al ZamanRAQIB 2025No ratings yet
- Art Funding EssayDocument2 pagesArt Funding EssayDương NguyễnNo ratings yet
- Data Communications: ECE 583 LectureDocument6 pagesData Communications: ECE 583 Lecturechloe005No ratings yet
- GEH-6126 Vol I PDFDocument134 pagesGEH-6126 Vol I PDFAbuk SabukNo ratings yet