You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Kalman FilterDocument1 pageKalman FilterShivan BiradarNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Data Driven ControlDocument6 pagesData Driven ControlShivan BiradarNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Control Conferences in 2021Document8 pagesControl Conferences in 2021Shivan BiradarNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Ieee Contingency GrantDocument1 pageIeee Contingency GrantShivan BiradarNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Morressier Poster Template PowerPointDocument1 pageMorressier Poster Template PowerPointShivan BiradarNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Limiter DataDocument7 pagesLimiter DataShivan BiradarNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Ashtavakra Gita - Sanskrit Text With English Transliteration & TranslationDocument142 pagesAshtavakra Gita - Sanskrit Text With English Transliteration & TranslationJyoti Dwivedi100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 2003 Bailliere PaciniDocument18 pages2003 Bailliere PaciniShivan BiradarNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Chapter 1 Introduction To Large-Scale SystemsDocument7 pagesChapter 1 Introduction To Large-Scale SystemsShivan BiradarNo ratings yet
- Lecture - 01 - Introduction & MotivationDocument21 pagesLecture - 01 - Introduction & MotivationShivan BiradarNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- ObservationsDocument1 pageObservationsShivan BiradarNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Mle 090Document1 pageMle 090Shivan BiradarNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Basic Preparation For PHDDocument11 pagesBasic Preparation For PHDShivan BiradarNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Mle 090Document1 pageMle 090Shivan BiradarNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Maximum Likelihood Estimation (MLE) : Type Equation Here.000Document15 pagesMaximum Likelihood Estimation (MLE) : Type Equation Here.000Shivan BiradarNo ratings yet
- UepDocument4 pagesUepShivan BiradarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- ConsolidatedDocument21 pagesConsolidatedShivan BiradarNo ratings yet
- SFG LCT 5th SemDocument59 pagesSFG LCT 5th SemShivan BiradarNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Matlab QuestionsDocument3 pagesMatlab QuestionsShivan BiradarNo ratings yet
- Multiobj HandoutDocument27 pagesMultiobj HandoutShivan BiradarNo ratings yet
- User Friendly Demonstration PCADocument39 pagesUser Friendly Demonstration PCAsteven231191No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- M. Tech. 1st Semester (PGEE-109) - Energy Management and Audit - 2012Document4 pagesM. Tech. 1st Semester (PGEE-109) - Energy Management and Audit - 2012Shivan BiradarNo ratings yet
- Figure 1-1 Basic Gates: A B C A B C And: C A B Or: C A + BDocument39 pagesFigure 1-1 Basic Gates: A B C A B C And: C A B Or: C A + BbikisahuNo ratings yet
- Writing An Abstract PDFDocument4 pagesWriting An Abstract PDFroisNo ratings yet
- Wiley - Wooldridge An Introduction To Multi Agent Systems (OCR Guaranteed On Full Book)Document365 pagesWiley - Wooldridge An Introduction To Multi Agent Systems (OCR Guaranteed On Full Book)leor2k367% (3)
- By Karl J. Åström, Richard E. Klein, and Anders LennartssonDocument22 pagesBy Karl J. Åström, Richard E. Klein, and Anders LennartssonShivan BiradarNo ratings yet
- Errata ICPACEDocument1 pageErrata ICPACEShivan BiradarNo ratings yet
- Reviewers CommentDocument1 pageReviewers CommentShivan BiradarNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Stability B LDocument14 pagesStability B LShivan BiradarNo ratings yet
- Sysnthesis of Robust PID Controller For Time Delay SystemsDocument6 pagesSysnthesis of Robust PID Controller For Time Delay SystemsShivan BiradarNo ratings yet
- ST-24 - UFSBI (Universal Fail Safe Block Interface) For D/LDocument32 pagesST-24 - UFSBI (Universal Fail Safe Block Interface) For D/Lvijay kumarNo ratings yet
- Study Material On Six Characters in Search of An Author by Luigi PirandelloDocument10 pagesStudy Material On Six Characters in Search of An Author by Luigi PirandelloSandipan MandalNo ratings yet
- A Brief History On ÆthelflædDocument1 pageA Brief History On ÆthelflædAtceraNo ratings yet
- Prescriptive GrammarDocument10 pagesPrescriptive GrammarMonette Rivera Villanueva100% (2)
- Contemporary Philippine Ars From The RegionDocument4 pagesContemporary Philippine Ars From The RegionLeah Jean VillegasNo ratings yet
- 2021-2022 Fall MATH163 Course OutlineDocument4 pages2021-2022 Fall MATH163 Course OutlineAhmed ShreefNo ratings yet
- BIOS Master Password Generator For LaptopsDocument1 pageBIOS Master Password Generator For LaptopsVincent PhilippinesNo ratings yet
- Capstone Project 1: User StoryDocument28 pagesCapstone Project 1: User StoryHoàng Văn HiếuNo ratings yet
- English-G7-Q1 Week 3-Revised PDFDocument33 pagesEnglish-G7-Q1 Week 3-Revised PDFClint Morrera DelgadoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Group Policy Management Console Scripting Samples (Windows)Document9 pagesGroup Policy Management Console Scripting Samples (Windows)Dacaen DanNo ratings yet
- FpguiDocument11 pagesFpguik1attila1No ratings yet
- English V Quarter 2 - Week 3Document2 pagesEnglish V Quarter 2 - Week 3Azhia KamlonNo ratings yet
- Hum 002 Sas 1-2Document8 pagesHum 002 Sas 1-2Elmer BoybantingNo ratings yet
- ServLets & JSPDocument21 pagesServLets & JSPSara PerryNo ratings yet
- ECA2plus Tests Grammar Check 2.2BDocument1 pageECA2plus Tests Grammar Check 2.2BGosia TrybusNo ratings yet
- Lab 1.3 - External Import DataDocument4 pagesLab 1.3 - External Import DataVishal TrivediNo ratings yet
- 1 - Unisys 1Document58 pages1 - Unisys 1Aniruddha BanerjeeNo ratings yet
- Comparative ReligionsDocument136 pagesComparative Religionsguyii86No ratings yet
- Aef4 - 02B - WBDocument3 pagesAef4 - 02B - WBRussellNo ratings yet
- Unit 4Document2 pagesUnit 4api-377848238No ratings yet
- 24-File Utama Naskah-95-1-10-20201229Document9 pages24-File Utama Naskah-95-1-10-20201229ajengNo ratings yet
- Formatted SSC CHSL Free Mock Held On 22nd December 2019 QuestionsDocument20 pagesFormatted SSC CHSL Free Mock Held On 22nd December 2019 QuestionsRahul SinghNo ratings yet
- Staying With Your Anointing - Charles CappsDocument15 pagesStaying With Your Anointing - Charles CappsAEMendez541100% (1)
- Copy MysqldownloadfilesDocument7 pagesCopy MysqldownloadfilesSana MirzaNo ratings yet
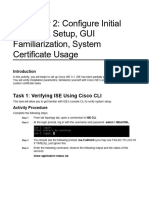
- Discovery 2: Configure Initial Cisco ISE Setup, GUI Familiarization, System Certificate UsageDocument27 pagesDiscovery 2: Configure Initial Cisco ISE Setup, GUI Familiarization, System Certificate UsagebounprakopNo ratings yet
- Learnenglish Kids Using Stories: A.Activities To Prepare Children For ReadingDocument3 pagesLearnenglish Kids Using Stories: A.Activities To Prepare Children For ReadingdavidNo ratings yet
- Four Strategies For Four Different Learning Styles in Grade 2Document2 pagesFour Strategies For Four Different Learning Styles in Grade 2Jonathan L. MagalongNo ratings yet
- ENG 301 Midterm 3-Papers MCQ S Solved by Fizza DastgirBhattiDocument11 pagesENG 301 Midterm 3-Papers MCQ S Solved by Fizza DastgirBhattiAhmed RajpootNo ratings yet
- Reading 5 - Data PreparationDocument23 pagesReading 5 - Data PreparationNR YalifeNo ratings yet