You might also like
- Val Grind TutorialDocument9 pagesVal Grind TutorialAdip ChyNo ratings yet
- Dynamic Memory Allocation BasicsDocument33 pagesDynamic Memory Allocation BasicsAdip ChyNo ratings yet
- CMOS logic gate design for enhanced aging robustnessDocument5 pagesCMOS logic gate design for enhanced aging robustnessAdip ChyNo ratings yet
- EE538 HW1 SolutionDocument4 pagesEE538 HW1 SolutionAdip ChyNo ratings yet
- RtosDocument34 pagesRtosAdip ChyNo ratings yet
- Multicores, Multiprocessors, and P, ClustersDocument51 pagesMulticores, Multiprocessors, and P, ClustersAdip ChyNo ratings yet
- Cse590490 HW2Document5 pagesCse590490 HW2Adip ChyNo ratings yet
- Google C++ Testing Framework: Running Test Programs: Advanced OptionsDocument18 pagesGoogle C++ Testing Framework: Running Test Programs: Advanced OptionsAdip ChyNo ratings yet
- Cse590490 Hw2 SolutionDocument6 pagesCse590490 Hw2 SolutionAdip ChyNo ratings yet
- Comparator PDFDocument24 pagesComparator PDFBá Anh ĐàoNo ratings yet
- EE538 Digital Comm HW2: Problems 3!2 to 3!%& Due WedDocument1 pageEE538 Digital Comm HW2: Problems 3!2 to 3!%& Due WedAdip ChyNo ratings yet
- Lab 1 ManualDocument9 pagesLab 1 ManualAdip ChyNo ratings yet
- Lec 6Document50 pagesLec 6Adip ChyNo ratings yet
- Lec 6Document50 pagesLec 6Adip ChyNo ratings yet
- Lec4a SuppDocument43 pagesLec4a SuppAdip ChyNo ratings yet
- Chapter 4B: The Processor, Part B: Mary Jane IrwinDocument56 pagesChapter 4B: The Processor, Part B: Mary Jane IrwinAdip ChyNo ratings yet
- Lec 4Document131 pagesLec 4Adip ChyNo ratings yet
- Lec5a SuppDocument77 pagesLec5a SuppAdip ChyNo ratings yet
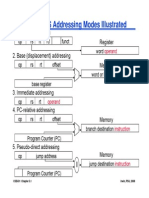
- Review: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryDocument31 pagesReview: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryAdip ChyNo ratings yet
- Arithmetic For ComputersDocument48 pagesArithmetic For ComputersAdip ChyNo ratings yet
- Introduction To MicroProcessor-Based ControlDocument33 pagesIntroduction To MicroProcessor-Based ControlDrVikas Singh BhadoriaNo ratings yet
- Lec 2 ADocument39 pagesLec 2 AAdip ChyNo ratings yet
- 2 L2 536 2013 8 28 UblDocument40 pages2 L2 536 2013 8 28 UblAdip ChyNo ratings yet
- Instructions: Language of The Computer PDocument92 pagesInstructions: Language of The Computer PAdip ChyNo ratings yet
- ArithmeticDocument13 pagesArithmeticAdip ChyNo ratings yet
- EE 536 Fall2013 SyllabusDocument1 pageEE 536 Fall2013 SyllabusAdip ChyNo ratings yet
- Lec 1Document57 pagesLec 1Adip ChyNo ratings yet
- 1 L1 536 2013 8 26 UblDocument33 pages1 L1 536 2013 8 26 UblAdip ChyNo ratings yet
- Lec03 HandoutDocument7 pagesLec03 HandoutAdip ChyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hacking Windows CeDocument29 pagesHacking Windows Cemaq213No ratings yet
- User-level vs kernel-level threads in OSDocument2 pagesUser-level vs kernel-level threads in OSLevi Joy Lem-itNo ratings yet
- Operating System S PDFDocument3 pagesOperating System S PDFSwikriti SaraswatNo ratings yet
- DC Module1Document54 pagesDC Module1Dev SharmaNo ratings yet
- Course ModulesDocument322 pagesCourse ModulesJoseph Amor Colis SomeraNo ratings yet
- Appendix A - Operating SystemsDocument64 pagesAppendix A - Operating Systemsryan_seysNo ratings yet
- ServletJava Questions MCQ 2 PDFDocument102 pagesServletJava Questions MCQ 2 PDFadithyata6No ratings yet
- Computer Awareness For Competitive ExamsDocument23 pagesComputer Awareness For Competitive ExamsCaur AmanNo ratings yet
- BCS303 Module 2 Ch4Document38 pagesBCS303 Module 2 Ch4samanthd2004No ratings yet
- Introduction to Operating Systems Chapter from Lecture NotesDocument17 pagesIntroduction to Operating Systems Chapter from Lecture NotesSivakumar AnnaduraiNo ratings yet
- Working Set Model & LocalityDocument15 pagesWorking Set Model & LocalitySunimali PereraNo ratings yet
- Advantages of Round Robin schedulingDocument124 pagesAdvantages of Round Robin schedulingblanooba231No ratings yet
- S7-300 ManualDocument154 pagesS7-300 ManualDavin StromNo ratings yet
- 2 CsessyllDocument50 pages2 CsessyllVINAYKUMAR Y BNo ratings yet
- OS FAQs - Threads, Processes, Memory, SchedulingDocument2 pagesOS FAQs - Threads, Processes, Memory, SchedulingrekhathiyagarajanNo ratings yet
- Directorate of Distance Education Kurukshetra University Kurukshetra-136119 Pgdca/Msc. (CS) - 1/mca-1Document236 pagesDirectorate of Distance Education Kurukshetra University Kurukshetra-136119 Pgdca/Msc. (CS) - 1/mca-1Copereal Copereal100% (1)
- M1C1 2 Systems SoftwareDocument26 pagesM1C1 2 Systems SoftwareMANASI NALAWADENo ratings yet
- Threads (Chapter 4) : ReferencesDocument29 pagesThreads (Chapter 4) : ReferencesSudip Kumar DeyNo ratings yet
- Course OutlineDocument5 pagesCourse OutlineMagarsa BedasaNo ratings yet
- Basic Guide to Getting Started with UNIX CommandsDocument14 pagesBasic Guide to Getting Started with UNIX CommandsSrinivas KankanampatiNo ratings yet
- ch2 PCDocument44 pagesch2 PCfariha2002No ratings yet
- UNIX and Shell Programming (Zer07)Document734 pagesUNIX and Shell Programming (Zer07)dasNo ratings yet
- CP264 A6 AssignmentDocument6 pagesCP264 A6 AssignmentKimara DesantoNo ratings yet
- Multithreading in Java: A Guide to ThreadsDocument4 pagesMultithreading in Java: A Guide to ThreadsSARAH FAROOQINo ratings yet
- Linux Programming AssignmentDocument8 pagesLinux Programming AssignmentTatangwa BillyNo ratings yet
- Module 5Document40 pagesModule 51HK16CS104 Muntazir Hussain BhatNo ratings yet
- Arhitectura TableauDocument67 pagesArhitectura TableauIonNo ratings yet
- Operating Systems Design Course HandoutDocument24 pagesOperating Systems Design Course HandoutAshish ReddyNo ratings yet
- GPUView Guide for Analyzing GPU PerformanceDocument31 pagesGPUView Guide for Analyzing GPU Performancemrx70.9.9100% (1)
- Computer Science - Study - PlanDocument10 pagesComputer Science - Study - PlanSARA ALABAHRAANo ratings yet