You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Courier Management System PresentationDocument11 pagesCourier Management System PresentationRodrigo Johnson0% (1)
- Development of Empirical Dynamic Models From Step Response DataDocument21 pagesDevelopment of Empirical Dynamic Models From Step Response DataInnocent ShetaanNo ratings yet
- Chapter 3Document20 pagesChapter 3Innocent ShetaanNo ratings yet
- Mathematical Modeling of Chemical ProcessesDocument43 pagesMathematical Modeling of Chemical ProcessesInnocent ShetaanNo ratings yet
- CHE334 Instrumentation and Process Control Lecture 13 & 14: Chapter 10: Dynamics of First Order SystemDocument33 pagesCHE334 Instrumentation and Process Control Lecture 13 & 14: Chapter 10: Dynamics of First Order SystemInnocent ShetaanNo ratings yet
- Ar09.10 P 1050akDocument3 pagesAr09.10 P 1050akAleksandar TubinNo ratings yet
- Groovy For Domain-Specific Languages - Second Edition - Sample ChapterDocument26 pagesGroovy For Domain-Specific Languages - Second Edition - Sample ChapterPackt PublishingNo ratings yet
- Textilelearner Blogspot Com 2012 07 Fabric Spreading Types of Fabric HTMLDocument6 pagesTextilelearner Blogspot Com 2012 07 Fabric Spreading Types of Fabric HTMLDeepthi SonuNo ratings yet
- Cannon Anchorage To ConcreteDocument47 pagesCannon Anchorage To ConcretePaul EvansNo ratings yet
- Electrical Work Flow Chart Example 1Document2 pagesElectrical Work Flow Chart Example 1Jamal Uddin0% (1)
- Testing & Maintenance of Rotating Machines Type Tests, Routine Tests & Special Tests of 1 & 3 Phase Induction MotorsDocument12 pagesTesting & Maintenance of Rotating Machines Type Tests, Routine Tests & Special Tests of 1 & 3 Phase Induction MotorsPKNo ratings yet
- Outdoor Power System: TP48200A-HD15A6Document2 pagesOutdoor Power System: TP48200A-HD15A6Mohammed Awaluddin Al-islamiNo ratings yet
- CA IdentityMinder Implement GuideDocument111 pagesCA IdentityMinder Implement GuideMixNo ratings yet
- Oil Filter (Hydraulic Hammer) - Replace - If Equipped (M0083583-14)Document3 pagesOil Filter (Hydraulic Hammer) - Replace - If Equipped (M0083583-14)Alberto BastidasNo ratings yet
- Hunt-1988-International Journal of Adaptive Control and Signal ProcessingDocument2 pagesHunt-1988-International Journal of Adaptive Control and Signal ProcessingFaizan ShabirNo ratings yet
- Food Grade Anti-Corrosion Grease: Special FeaturesDocument2 pagesFood Grade Anti-Corrosion Grease: Special Featureschem KhanNo ratings yet
- Fundamentals of Project Management Week 5Document7 pagesFundamentals of Project Management Week 5Tauseef KhanNo ratings yet
- Design and Architecture of Intel's Core I7 ProcessorDocument6 pagesDesign and Architecture of Intel's Core I7 Processorpratik mahajanNo ratings yet
- 2011 Coh Design Manual Submersible Lift StationsDocument200 pages2011 Coh Design Manual Submersible Lift StationsjituplanojrNo ratings yet
- LSTK Tender BargarhDocument55 pagesLSTK Tender BargarhNitin KurupNo ratings yet
- OEZ - Circuit BreakerDocument296 pagesOEZ - Circuit Breaker600sNo ratings yet
- Instruction Manual of Fisher 3660 and 3661 Positioners PDFDocument44 pagesInstruction Manual of Fisher 3660 and 3661 Positioners PDFRiyanto BebetNo ratings yet
- Jacketed Vessel DesignDocument9 pagesJacketed Vessel DesignSyed HaideriNo ratings yet
- Architecture of 80286 80386 80486 MicroproseccorsDocument91 pagesArchitecture of 80286 80386 80486 MicroproseccorsYash Mistry100% (1)
- EthereumDocument4 pagesEthereumctorrep1853No ratings yet
- Level Flow MeasurementDocument79 pagesLevel Flow MeasurementswatkoolNo ratings yet
- My Insignia OptionsDocument3 pagesMy Insignia Optionscarl robinsonNo ratings yet
- Ioa ConfigurationDocument14 pagesIoa Configurationapi-290806731No ratings yet
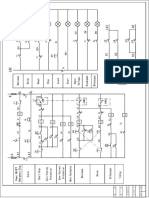
- Secondary Control DiagramDocument1 pageSecondary Control DiagrammeinalitaminamiNo ratings yet
- 45ess2006 PDFDocument309 pages45ess2006 PDFjoao121289No ratings yet
- CP 060 en ThermovacDocument14 pagesCP 060 en ThermovacMayur ChauhanNo ratings yet
- Operator Parts IdentificationDocument3 pagesOperator Parts IdentificationRodolfo Franco RFNo ratings yet
- Pr-11672457-Cotton Rags and Ppe For WelderDocument2 pagesPr-11672457-Cotton Rags and Ppe For WelderOdsoren MartinsNo ratings yet