You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Advance OrganizerDocument25 pagesAdvance OrganizerDeepak SakkariNo ratings yet
- NATA 2022 Exam Guide Pattern Sample QuestionsDocument13 pagesNATA 2022 Exam Guide Pattern Sample QuestionsDeepak SakkariNo ratings yet
- CSE-206 MP Theory HandoutDocument5 pagesCSE-206 MP Theory HandoutDeepak SakkariNo ratings yet
- Organizer / Faculty Coordinator's (FC) RoleDocument3 pagesOrganizer / Faculty Coordinator's (FC) RoleDeepak SakkariNo ratings yet
- Lecture 1423813120Document4 pagesLecture 1423813120Deepak SakkariNo ratings yet
- Lec 14Document28 pagesLec 14Deepak SakkariNo ratings yet
- Lec 16Document27 pagesLec 16Deepak SakkariNo ratings yet
- Lec 19Document21 pagesLec 19Deepak SakkariNo ratings yet
- Lec 4Document18 pagesLec 4Deepak SakkariNo ratings yet
- Lec 2Document17 pagesLec 2Deepak SakkariNo ratings yet
- Lec 13Document20 pagesLec 13Deepak SakkariNo ratings yet
- Lec 7Document23 pagesLec 7Deepak SakkariNo ratings yet
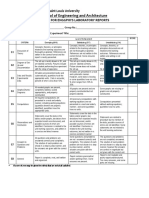
- School of Engineering and Architecture: Saint Louis University Rubric For Enggphys Laboratory ReportsDocument1 pageSchool of Engineering and Architecture: Saint Louis University Rubric For Enggphys Laboratory ReportsKit LbjNo ratings yet
- Part 1 Building Your Own Binary Classification ModelDocument6 pagesPart 1 Building Your Own Binary Classification ModelWathek Al Zuaiby38% (13)
- HyperMesh For FE ModelingDocument5 pagesHyperMesh For FE ModelingdvarsastryNo ratings yet
- Prof. Dr. Ramli Ibrahim Dr. Norlaili Abu BakarDocument24 pagesProf. Dr. Ramli Ibrahim Dr. Norlaili Abu BakarNurshuhada NordinNo ratings yet
- Data StructureDocument26 pagesData Structurezafri nordinNo ratings yet
- New Text DocumentDocument29 pagesNew Text DocumentRohan TandekarNo ratings yet
- Predictive Analytics-Mid Sem Exam Question BankDocument28 pagesPredictive Analytics-Mid Sem Exam Question BankyashpatelykpNo ratings yet
- Time Value For Money (Compatibility Mode)Document87 pagesTime Value For Money (Compatibility Mode)Azman ScxNo ratings yet
- Module - 4 AIMLDocument22 pagesModule - 4 AIMLgovardhanhl5411No ratings yet
- Detect and Remove Loop in A Linked ListDocument7 pagesDetect and Remove Loop in A Linked ListDhruv ChawdaNo ratings yet
- FADML 05 PPC Dynamic Programming PDFDocument21 pagesFADML 05 PPC Dynamic Programming PDFarpan singhNo ratings yet
- Download pdf Advances In Data Science Cyber Security And It Applications First International Conference On Computing Icc 2019 Riyadh Saudi Arabia December 10 12 2019 Proceedings Part I Auhood Alfaries ebook full chapterDocument54 pagesDownload pdf Advances In Data Science Cyber Security And It Applications First International Conference On Computing Icc 2019 Riyadh Saudi Arabia December 10 12 2019 Proceedings Part I Auhood Alfaries ebook full chapterwilliam.styles453100% (5)
- State Estimation: Vipin Chandra PandeyDocument28 pagesState Estimation: Vipin Chandra PandeysreedeviishNo ratings yet
- Basics of Polynomials: Coefficients, Degree, and Leading TermsDocument6 pagesBasics of Polynomials: Coefficients, Degree, and Leading Termsr1u2No ratings yet
- Discrete Structure Chapter 6-Recurrence RelationDocument38 pagesDiscrete Structure Chapter 6-Recurrence Relationrockers91No ratings yet
- CH 13Document123 pagesCH 13Nm TurjaNo ratings yet
- ISYE 8803 - Kamran - M2 - Image ProcessingDocument54 pagesISYE 8803 - Kamran - M2 - Image ProcessingVida GholamiNo ratings yet
- An Analysis and Implementation of The BM3D Image Denoising MethodDocument39 pagesAn Analysis and Implementation of The BM3D Image Denoising MethodEnaNukovićNo ratings yet
- Kuwait University College of Engineering & Petroleum Spring 2014Document6 pagesKuwait University College of Engineering & Petroleum Spring 2014Saied Aly SalamahNo ratings yet
- Regression Analysis: By: Vaibhav SahuDocument17 pagesRegression Analysis: By: Vaibhav SahusahuvaibhavNo ratings yet
- Linear Control Systems Lab (EE3302) : E X Per I M E NT NO: 1Document19 pagesLinear Control Systems Lab (EE3302) : E X Per I M E NT NO: 1Syed Shehryar Ali NaqviNo ratings yet
- CH4 CNSDocument29 pagesCH4 CNSSARDAR PATELNo ratings yet
- Complex Engineering Problem DCS 2020Document1 pageComplex Engineering Problem DCS 2020tasibkhanNo ratings yet
- Exploratory Data Analysis: Datascience Using Python Topic: 3Document32 pagesExploratory Data Analysis: Datascience Using Python Topic: 3KALYANI KIRANNo ratings yet
- Module 2 AnimatedDataRepCompArith Bhanu ChanderDocument18 pagesModule 2 AnimatedDataRepCompArith Bhanu ChanderAvv ReddyNo ratings yet
- Restricted Boltzmann Machines On Multi-Core Processors: by Sai Prasad Nooka Stavan KariaDocument31 pagesRestricted Boltzmann Machines On Multi-Core Processors: by Sai Prasad Nooka Stavan KarianpnbkckNo ratings yet
- Anomal Detection With Keras, Tensorflow, and Deep Learning: Click Here To Download The Source Code To This PostDocument40 pagesAnomal Detection With Keras, Tensorflow, and Deep Learning: Click Here To Download The Source Code To This Post超揚林No ratings yet
- Frequency Based Fatigue: Professor Darrell F. SocieDocument59 pagesFrequency Based Fatigue: Professor Darrell F. SocieSunilkumar ReddyNo ratings yet
- One-Time Pad or Vernam CipherDocument19 pagesOne-Time Pad or Vernam Cipherrsvishalsingh93No ratings yet
- Chapter 3 Controllability and Observability Part II PDFDocument37 pagesChapter 3 Controllability and Observability Part II PDFAlemayehu TeshomeNo ratings yet