You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Beam Deflection FormulaeDocument2 pagesBeam Deflection Formulae7575757575100% (6)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 01 Transformer Tutorial Solution Rev1Document7 pages01 Transformer Tutorial Solution Rev1Aruna KumarasiriNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Dongtai Catalog2022.4.29Document335 pagesDongtai Catalog2022.4.29Flores Brayan100% (1)
- Pacific Scirocco 2017-08-03 Revision 7Document2 pagesPacific Scirocco 2017-08-03 Revision 7wangnaNo ratings yet
- MCQ AcsDocument21 pagesMCQ AcsVinoth KumarNo ratings yet
- Tac, Fire Protection ManulDocument81 pagesTac, Fire Protection ManulVijay PatelNo ratings yet
- Bolt Torque & GasketDocument63 pagesBolt Torque & Gasketejajs100% (2)
- Caterpillar Cat 320 GC Excavator (Prefix KTN) Service Repair Manual (KTN00001 and Up)Document21 pagesCaterpillar Cat 320 GC Excavator (Prefix KTN) Service Repair Manual (KTN00001 and Up)kfmuseddk75% (8)
- Quadrotor Simulator PD ControllerDocument3 pagesQuadrotor Simulator PD ControllerVinoth KumarNo ratings yet
- SRM ABP Question PaperDocument2 pagesSRM ABP Question PaperVinoth KumarNo ratings yet
- MCQ AcsDocument49 pagesMCQ AcsVinoth Kumar100% (1)
- இந்து திருமண பதிவு விண்ணப்ப படிவம்Document6 pagesஇந்து திருமண பதிவு விண்ணப்ப படிவம்Bakrudeen Ali AhamedNo ratings yet
- Advertisements: r (t) = A sin (t) ωDocument6 pagesAdvertisements: r (t) = A sin (t) ωVinoth KumarNo ratings yet
- The Design and Feasibility of One Man Copter: ResultsDocument1 pageThe Design and Feasibility of One Man Copter: ResultsVinoth KumarNo ratings yet
- The Design and Feasibility of One Man Copter: ResultsDocument1 pageThe Design and Feasibility of One Man Copter: ResultsVinoth KumarNo ratings yet
- GSD PointSplineLoftFromExcelDocument1 pageGSD PointSplineLoftFromExcelVinoth KumarNo ratings yet
- Brayton CycleDocument7 pagesBrayton CycleEndarto YudoNo ratings yet
- Intake and Nozzle Problems NumericalDocument7 pagesIntake and Nozzle Problems Numericalapi-271354682100% (1)
- Phantom C TrllogDocument1 pagePhantom C TrllogVinoth KumarNo ratings yet
- Lec 2Document31 pagesLec 2muzammalsafdarNo ratings yet
- Continuous AssessmentformatDocument1 pageContinuous AssessmentformatVinoth KumarNo ratings yet
- Rocket Propulsion FundamentalsDocument3 pagesRocket Propulsion FundamentalsVinoth KumarNo ratings yet
- DCS AnswersDocument1 pageDCS AnswersVinoth KumarNo ratings yet
- Chi SquareDocument5 pagesChi SquareVmani KandanNo ratings yet
- Open Gas Turbine Brayton Cycle SchematicDocument12 pagesOpen Gas Turbine Brayton Cycle SchematicVinoth KumarNo ratings yet
- Digital AvionicsDocument3 pagesDigital AvionicsVinoth KumarNo ratings yet
- Phantom C TrllogDocument1 pagePhantom C TrllogVinoth KumarNo ratings yet
- Btech Syll Aero r2013-14Document152 pagesBtech Syll Aero r2013-14Vignesh SelvarajNo ratings yet
- Four Comp Sheet 5Document1 pageFour Comp Sheet 5Vinoth KumarNo ratings yet
- Wheel HubDocument1 pageWheel HubVinoth KumarNo ratings yet
- Truss 2DDocument11 pagesTruss 2DVinoth KumarNo ratings yet
- Turbine Inlet Ice Related Failures and Predicting Inlet Ice FormationDocument13 pagesTurbine Inlet Ice Related Failures and Predicting Inlet Ice FormationVinoth KumarNo ratings yet
- GSD PointSplineLoftFromExcelDocument1 pageGSD PointSplineLoftFromExcelVinoth KumarNo ratings yet
- PyroDocument122 pagesPyroVinoth KumarNo ratings yet
- Faculty Profile Template For Website: Basic DetailsDocument1 pageFaculty Profile Template For Website: Basic DetailsVinoth KumarNo ratings yet
- Liebert Ups Catalogue en PDFDocument28 pagesLiebert Ups Catalogue en PDFtuan nguyen duyNo ratings yet
- Section 1: Types of SolutionDocument13 pagesSection 1: Types of SolutionAndreaNicoleBanzonNo ratings yet
- I For A Hollow SphereDocument1 pageI For A Hollow SphereShubhankar NayakNo ratings yet
- ISO 18436-2 CAT-III Certified Vibration Analyst Hamza AshrafDocument2 pagesISO 18436-2 CAT-III Certified Vibration Analyst Hamza AshrafHamza AshrafNo ratings yet
- P68C STD Equipm GarminDocument7 pagesP68C STD Equipm Garmincaptrohit100% (1)
- Paper 3 Answering SessionDocument7 pagesPaper 3 Answering SessionatiqahNo ratings yet
- Lexium 05 & Motors - BSH0553P02F2ADocument7 pagesLexium 05 & Motors - BSH0553P02F2ADominik Márk BaglyasNo ratings yet
- Hydropower: The Hashemite UniversityDocument24 pagesHydropower: The Hashemite Universityلينا جودةNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFBOSS BOSSNo ratings yet
- CFB BOILER DESIGN AND OPERATION MANUALDocument8 pagesCFB BOILER DESIGN AND OPERATION MANUALpepenapao1217No ratings yet
- ILIFE X5 English User ManualDocument16 pagesILIFE X5 English User Manualdexter65No ratings yet
- Id Technik Cable ClampsDocument47 pagesId Technik Cable Clampsdiegofer1No ratings yet
- CUBE-300 - SubmittalDocument3 pagesCUBE-300 - SubmittalElmer Ramón Murillo MejiaNo ratings yet
- Chapter 2.2 Lubricants-LubricationDocument27 pagesChapter 2.2 Lubricants-Lubricationmms66No ratings yet
- Emi Notes (Cbse Class 12 2021-22)Document5 pagesEmi Notes (Cbse Class 12 2021-22)Shaku JoshiNo ratings yet
- AP Physics C: Electricity and Magnetism: Free-Response Questions Set 1Document14 pagesAP Physics C: Electricity and Magnetism: Free-Response Questions Set 1AnitaNo ratings yet
- Economic Aspects: Ammonia: Principles and Industrial PracticeDocument10 pagesEconomic Aspects: Ammonia: Principles and Industrial PracticeKathee TamaayoNo ratings yet
- Clamp Meters: Quick Reference GuideDocument2 pagesClamp Meters: Quick Reference GuideRaul InzunzaNo ratings yet
- Activity 4 The Carbon CycleDocument7 pagesActivity 4 The Carbon CycleElleNo ratings yet
- PSC-series DC/DC Converters 120-240 WDocument8 pagesPSC-series DC/DC Converters 120-240 Wparesh joshiNo ratings yet
- ACEN RES Digital BriefDocument8 pagesACEN RES Digital Briefgilanilagan.mrmNo ratings yet
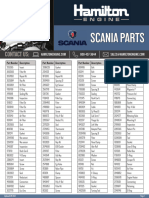
- Scania Diesel Engine Parts CatalogDocument3 pagesScania Diesel Engine Parts CatalogTarek MassimoNo ratings yet
- DIESEL CYCLE With ExplantionDocument5 pagesDIESEL CYCLE With ExplantionEES StudyNo ratings yet
- The Singapore EngineerDocument52 pagesThe Singapore EngineerGary GohNo ratings yet