You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assignment ModelDocument3 pagesAssignment ModelSophia April100% (1)
- Two-Phase Method and Dual Simplex MethodDocument8 pagesTwo-Phase Method and Dual Simplex MethodSyed Waheeb Akhter Zaidi100% (1)
- Separable ProgrammingDocument6 pagesSeparable ProgrammingMohamed Farag MostafaNo ratings yet
- Prelim Exam PDFDocument6 pagesPrelim Exam PDFPaw VerdilloNo ratings yet
- SyllabusDocument2 pagesSyllabusBabitha DhanaNo ratings yet
- CHAPTER 11 Part 2Document6 pagesCHAPTER 11 Part 2Ailene Quinto100% (1)
- Optimization and Linear Programming: An IntroductionDocument32 pagesOptimization and Linear Programming: An Introductionmarichu apiladoNo ratings yet
- Nets of 3D Shapes - Selwood Teaching SheetDocument3 pagesNets of 3D Shapes - Selwood Teaching SheetMah-eenNo ratings yet
- Lecture Note 1 CE605A&CHE705BDocument5 pagesLecture Note 1 CE605A&CHE705BSamrat RouthNo ratings yet
- MSC (Computational and Integrative Sciences) : M.Sc. ProgrammeDocument21 pagesMSC (Computational and Integrative Sciences) : M.Sc. ProgrammeDIKCHHA AGRAWALNo ratings yet
- Symmetry - Culture and ScienceDocument116 pagesSymmetry - Culture and SciencecoerenciaceNo ratings yet
- CHE356Document2 pagesCHE356Farhad SeNo ratings yet
- Lecture 3Document22 pagesLecture 3degife deshaNo ratings yet
- Man203 Chapter 2 Simplex MethodDocument5 pagesMan203 Chapter 2 Simplex MethodŞevkiEmreBeşirNo ratings yet
- 225 Final Questions PDFDocument4 pages225 Final Questions PDFValerie PriadkinaNo ratings yet
- Ge8151 Python Programming Question BankDocument29 pagesGe8151 Python Programming Question Bankbala0% (1)
- OR2A - Mr. DeepakDocument39 pagesOR2A - Mr. DeepakshariqNo ratings yet
- Exam 2.tst LPDocument14 pagesExam 2.tst LPSONYA SAHANI100% (1)
- Linear Programming: After Completing This Chapter, Students Will Be Able ToDocument61 pagesLinear Programming: After Completing This Chapter, Students Will Be Able ToUTTAM KOIRALANo ratings yet
- Scheduling of Flowshop Type Production With Dannenbring Method To Obtain Optimal Results With Observing Waiting Time and Weight of JobsDocument11 pagesScheduling of Flowshop Type Production With Dannenbring Method To Obtain Optimal Results With Observing Waiting Time and Weight of JobsZaenudin PrasetyaNo ratings yet
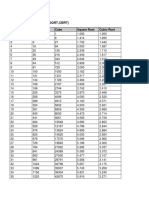
- SQRT CBRT MymathtablesDocument3 pagesSQRT CBRT MymathtablesAnonymous dYAP9q100% (1)
- StatisticsDocument20 pagesStatisticsEconomic TruthNo ratings yet
- Decision Analysis & ModellingDocument2 pagesDecision Analysis & Modellingsumit6singhNo ratings yet
- Profit Maximization in A Product Mix Company Using Linear ProgrammingDocument6 pagesProfit Maximization in A Product Mix Company Using Linear Programmingdereje assefaNo ratings yet
- 4-The Simplex MethodDocument33 pages4-The Simplex MethodKalai Vani100% (1)
- A Handbook of Mathematical Mode - Dr. Ranja SarkerDocument232 pagesA Handbook of Mathematical Mode - Dr. Ranja SarkerJohn100% (1)
- Maa 2003Document19 pagesMaa 2003Ibrahim El SharNo ratings yet
- Operation Research Sample ExerciseDocument4 pagesOperation Research Sample ExerciseYong LiNo ratings yet
- Decision Science MOCK TEST 1 With Answer KeyDocument60 pagesDecision Science MOCK TEST 1 With Answer KeyShubham JadhavNo ratings yet