You might also like
- CLP - Controladores Lógicos ProgramáveisDocument100 pagesCLP - Controladores Lógicos ProgramáveisAnonymous fBjdRyyNo ratings yet
- Senai Controles ProgramaveisDocument327 pagesSenai Controles ProgramaveisFabrício Eduardo BelloNo ratings yet
- Senai - Aula02 - CLPDocument77 pagesSenai - Aula02 - CLPCleber AndersonNo ratings yet
- Introdução a Controladores Lógicos ProgramáveisDocument40 pagesIntrodução a Controladores Lógicos ProgramáveisRafael Pereira Goncalves100% (1)
- Apostila CLP ClicEdit AlexandreDocument26 pagesApostila CLP ClicEdit AlexandreJoão Dias da SilveiraNo ratings yet
- Programação CLP em 21 minutosDocument23 pagesProgramação CLP em 21 minutosMaiquel LepichNo ratings yet
- 1.a Aula - PRÁTICA COM SOFT STARTERDocument11 pages1.a Aula - PRÁTICA COM SOFT STARTEREdwir MarceloNo ratings yet
- Configuração e Partida com Soft-StarterDocument15 pagesConfiguração e Partida com Soft-StarterVinicius GuedesNo ratings yet
- Comandos Elétricos Componentes Manobra AplicaçõesDocument2 pagesComandos Elétricos Componentes Manobra AplicaçõesBruno Justo PrandiniNo ratings yet
- Eletronica Analogica Senai SCDocument98 pagesEletronica Analogica Senai SClucianomadeiraNo ratings yet
- Análise de CircuitosDocument18 pagesAnálise de CircuitosFelipe AraujoNo ratings yet
- Programador CLPs: segredos para sucessoDocument38 pagesProgramador CLPs: segredos para sucessoJoão Luis BarrosNo ratings yet
- Apostila Inversores de FrequênciaDocument89 pagesApostila Inversores de FrequênciaBira SantanaNo ratings yet
- Marcelo Eurípedes Da Silva, Fevereiro de 2007Document40 pagesMarcelo Eurípedes Da Silva, Fevereiro de 2007Rafael Marques100% (2)
- Programação CLP S7 - 300Document140 pagesProgramação CLP S7 - 300João CarlosNo ratings yet
- Apostila CLP CompletaDocument87 pagesApostila CLP CompletaEvandro Duarte100% (1)
- Apostila de Treinamento CP1LDocument113 pagesApostila de Treinamento CP1LJosé Augusto Martins Lino100% (1)
- TIRISTORES - SCR S e TRIAC SDocument28 pagesTIRISTORES - SCR S e TRIAC SIsaiah AlexanderNo ratings yet
- Treinamento SiemensDocument283 pagesTreinamento SiemensEric LimaNo ratings yet
- Apostila1 CLP LogoDocument30 pagesApostila1 CLP LogoAutpar100% (1)
- Curso Eletrônica - SCR Parte IDocument4 pagesCurso Eletrônica - SCR Parte IFadir SalmenNo ratings yet
- Controle ATV312 via ModbusDocument10 pagesControle ATV312 via ModbusGera BarbosaNo ratings yet
- Curso CLP Siemens S7-200Document37 pagesCurso CLP Siemens S7-200nadab01No ratings yet
- Apostila - Conversores de Frequência - (Senai-MG)Document42 pagesApostila - Conversores de Frequência - (Senai-MG)Jardel JuniorNo ratings yet
- MF 47Document43 pagesMF 47Symon4949100% (1)
- Apostila Comandos Máquinas Eletricas (Aprendizagem Instalações Elétricas 1ºSEM 2012)Document177 pagesApostila Comandos Máquinas Eletricas (Aprendizagem Instalações Elétricas 1ºSEM 2012)Tiago José de CamposNo ratings yet
- Como Programar No CLPDocument93 pagesComo Programar No CLPLuiz AlvesNo ratings yet
- Workshop Comandos Eletricos Expert Material de Estudos - Aula01Document28 pagesWorkshop Comandos Eletricos Expert Material de Estudos - Aula01mezaneyraNo ratings yet
- 4 Aula Pratica Com Inversor de FrequenciaDocument26 pages4 Aula Pratica Com Inversor de FrequenciaEverton LuisNo ratings yet
- Curso Técnico em Automação - Processamento de SinaisDocument22 pagesCurso Técnico em Automação - Processamento de Sinaisaamvpr100% (1)
- Soft-Starter e Inversor de FreqüênciaDocument40 pagesSoft-Starter e Inversor de Freqüênciafelizari100% (2)
- Introdução aos Controladores Lógicos Programáveis (CLPDocument41 pagesIntrodução aos Controladores Lógicos Programáveis (CLPAMINTA MANZANILLANo ratings yet
- 2 PDFDocument32 pages2 PDFWillian Lopes BrumNo ratings yet
- Ebook - CLPDocument21 pagesEbook - CLPAdilton Nascimento100% (1)
- Tecnicas de Controle Senai PARTE02Document31 pagesTecnicas de Controle Senai PARTE02Evalgues De Souza Borges100% (1)
- CLP Automação IndustrialDocument129 pagesCLP Automação IndustrialGilsonNo ratings yet
- UntitledDocument100 pagesUntitledFAUSTO100% (2)
- Aula 01 - Sistemas Lógicos ProgramáveisDocument11 pagesAula 01 - Sistemas Lógicos ProgramáveisWAGNER RODRIGUES DE ABREU100% (1)
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte IFrom EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte INo ratings yet
- Apostila - Automação e ControleDocument100 pagesApostila - Automação e ControleFredcrdguiNo ratings yet
- Teoria 19 EncodersDocument13 pagesTeoria 19 EncodersAmanda DiasNo ratings yet
- Apostlia CLPDocument80 pagesApostlia CLPHeidi ThompsonNo ratings yet
- 12.1-Sistemas de Partidas 1Document38 pages12.1-Sistemas de Partidas 1Rubão NestorNo ratings yet
- S7-1200 - Conversao de Escalas PDFDocument5 pagesS7-1200 - Conversao de Escalas PDFBruno BatistaNo ratings yet
- Graus de proteção NEMA x IECDocument1 pageGraus de proteção NEMA x IECRodnei Roberto BotossoNo ratings yet
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoFrom EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo ratings yet
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoFrom EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoNo ratings yet
- Implementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvFrom EverandImplementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvNo ratings yet
- JBD MemorialDocument98 pagesJBD MemorialWesley de PaulaNo ratings yet
- PDE Conversão Energia 2017.2Document2 pagesPDE Conversão Energia 2017.2Wesley de PaulaNo ratings yet
- Circuitos com Amplificadores OperacionaisDocument29 pagesCircuitos com Amplificadores OperacionaisEdu ArdoNo ratings yet
- Modelo Ebers-Moll prevê operação do transistorDocument1 pageModelo Ebers-Moll prevê operação do transistorWesley de PaulaNo ratings yet
- Spda3 v8 17 PDFDocument48 pagesSpda3 v8 17 PDFSuelly PinheiroNo ratings yet
- Aula5 Interruptorsimples2 3 Secoes Paralelo PDFDocument18 pagesAula5 Interruptorsimples2 3 Secoes Paralelo PDFWesley de PaulaNo ratings yet
- Gabarito 6pulsosDocument1 pageGabarito 6pulsosWesley de PaulaNo ratings yet
- Conversão de Energia Elétrica em Máquinas e TransformadoresDocument3 pagesConversão de Energia Elétrica em Máquinas e TransformadoresWesley de PaulaNo ratings yet
- Slides Exp.3 - Transistores e Circuitos Reguladores (Prof. Flávio Buiochi)Document8 pagesSlides Exp.3 - Transistores e Circuitos Reguladores (Prof. Flávio Buiochi)Wesley de PaulaNo ratings yet
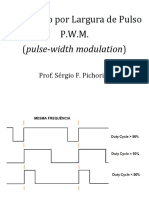
- Modulação Por Largura de Pulso P.W.M. (Pulse-Width Modulation)Document11 pagesModulação Por Largura de Pulso P.W.M. (Pulse-Width Modulation)Wesley de PaulaNo ratings yet
- Aulas Latex Intermediario PDFDocument20 pagesAulas Latex Intermediario PDFWesley de PaulaNo ratings yet
- Lista de Exercícios Valor: 4,0Document1 pageLista de Exercícios Valor: 4,0Wesley de PaulaNo ratings yet
- Telecurso 2000 - Elementos de Maquinas - Volume 1 e 2Document414 pagesTelecurso 2000 - Elementos de Maquinas - Volume 1 e 2rodrigofgui80% (5)
- Questionário de Revisão Sobre TransformadoresDocument2 pagesQuestionário de Revisão Sobre TransformadoresWesley de PaulaNo ratings yet
- Questionário de Revisão Sobre TransformadoresDocument2 pagesQuestionário de Revisão Sobre TransformadoresWesley de PaulaNo ratings yet
- Amplificadores Operacionais: Teoria e Resolução de ExercíciosDocument20 pagesAmplificadores Operacionais: Teoria e Resolução de ExercíciosbentoNo ratings yet
- Qualis NovosDocument441 pagesQualis NovosendelmullerNo ratings yet
- FisExp3 Exp6Document17 pagesFisExp3 Exp6Wesley de PaulaNo ratings yet
- Aulas Latex Intermediario PDFDocument20 pagesAulas Latex Intermediario PDFWesley de PaulaNo ratings yet
- SumarioDocument1 pageSumarioWesley de PaulaNo ratings yet
- Entrada Conversor Retificador Boost PFCDocument1 pageEntrada Conversor Retificador Boost PFCWesley de PaulaNo ratings yet
- Kernel PDFDocument46 pagesKernel PDFWesley de PaulaNo ratings yet
- Relatório de Visita Técnica NIMO NAEPDocument2 pagesRelatório de Visita Técnica NIMO NAEPWesley de PaulaNo ratings yet
- Amplificadores Operacionais: Teoria e Resolução de ExercíciosDocument20 pagesAmplificadores Operacionais: Teoria e Resolução de ExercíciosbentoNo ratings yet
- CLP: Características e tipos de memóriaDocument95 pagesCLP: Características e tipos de memóriaWesley de PaulaNo ratings yet
- CLP: Características e tipos de memóriaDocument95 pagesCLP: Características e tipos de memóriaWesley de PaulaNo ratings yet
- Programação Ladder CLPDocument20 pagesProgramação Ladder CLPMakyfranciscoNo ratings yet
- Arte Eletronica de Potencia PDFDocument130 pagesArte Eletronica de Potencia PDFThiago NunesNo ratings yet
- Arte Eletronica de Potencia PDFDocument130 pagesArte Eletronica de Potencia PDFThiago NunesNo ratings yet
- O Poder Das Ervas Na África - Selma Sá e Rodrigo de Logun - Versão Final - CodDocument85 pagesO Poder Das Ervas Na África - Selma Sá e Rodrigo de Logun - Versão Final - CodDaniel R.O100% (8)
- Carta para resolver dor de perda de amizadeDocument4 pagesCarta para resolver dor de perda de amizadeJoão Emílio Damaceno dos SantosNo ratings yet
- SONDA ROTATIVA CHECK LIST Atualizada 08 06 2020Document1 pageSONDA ROTATIVA CHECK LIST Atualizada 08 06 2020Marcos Antonio FelisardoNo ratings yet
- Simplesmente Sobrenatural - Rose Nascimento - LETRAS - MusDocument4 pagesSimplesmente Sobrenatural - Rose Nascimento - LETRAS - MusmesaxmelNo ratings yet
- A Grande Fuga - Sylvio PereiraDocument75 pagesA Grande Fuga - Sylvio Pereirahumb_santosNo ratings yet
- Mais Que AmigosDocument1 pageMais Que AmigosRafael SathlerNo ratings yet
- A Importancia Da Apicultura No BrasilDocument6 pagesA Importancia Da Apicultura No BrasilGustavo DelgadoNo ratings yet
- Códigos de Defeito: Montadora Sistema Nome Fiat Injeção EDC15C7Document6 pagesCódigos de Defeito: Montadora Sistema Nome Fiat Injeção EDC15C7gustavo silvaNo ratings yet
- Elevação Pelvica e AgachamentoDocument14 pagesElevação Pelvica e AgachamentoArtur VerasNo ratings yet
- EJA e sua importância socialDocument82 pagesEJA e sua importância socialJose Roberto Junior Costa100% (1)
- Exercícios Funções SintáticasDocument5 pagesExercícios Funções Sintáticasmariaduxa100% (1)
- (Aluno) Av. Form Mat 2anoDocument11 pages(Aluno) Av. Form Mat 2anoFernanda Lima de Pinho Reis ReisNo ratings yet
- Avaliação intercalar EB 2,3 VisoDocument1 pageAvaliação intercalar EB 2,3 VisoprofalexramosNo ratings yet
- Roteiro Aula Pratica P EnviarDocument4 pagesRoteiro Aula Pratica P EnviarÉrika PatriciaNo ratings yet
- Biologia 2o Ano: Moléculas, Água e UsosDocument37 pagesBiologia 2o Ano: Moléculas, Água e UsosALANNA ERICA PONTES BARBOSANo ratings yet
- Memória de Martim FranciscoDocument24 pagesMemória de Martim FranciscoVanderlei AmboniNo ratings yet
- Resumo+7ºDocument4 pagesResumo+7ºCatia RosaNo ratings yet
- Texto 04 - QuadriláterosDocument8 pagesTexto 04 - QuadriláterosAbílio Júnior MubaiNo ratings yet
- Manual de instruções DLDocument24 pagesManual de instruções DLAntônio MiguelNo ratings yet
- Grande Hino A AtonDocument20 pagesGrande Hino A AtonFrank C. SilvaNo ratings yet
- Tabela de DRDocument3 pagesTabela de DRSuzianeNo ratings yet
- aÇÃo de Pedido de RemÉdioDocument15 pagesaÇÃo de Pedido de RemÉdioapi-3798293100% (9)
- Diagnóstico tridimensional da faceDocument180 pagesDiagnóstico tridimensional da facePaula Andrea MonroyNo ratings yet
- VampiroDocument79 pagesVampiroLuiz Henrique Matias MarcondesNo ratings yet
- Primeiros Socorros Básico ProvaDocument5 pagesPrimeiros Socorros Básico ProvaDcastro Soares80% (5)
- 30 dicas para mães de primeira viagemDocument18 pages30 dicas para mães de primeira viagemBrenda CunhaNo ratings yet
- (2001) Superinteressante 161 - Vacinas, A Cura Ou A DoençaDocument8 pages(2001) Superinteressante 161 - Vacinas, A Cura Ou A DoençaMarcus SevenNo ratings yet
- Tema Da Redação Do Enem 2023 É 'Desafios para o eDocument1 pageTema Da Redação Do Enem 2023 É 'Desafios para o evictoria.seabra26No ratings yet
- Boletos NF 5891 - Lubricela Lubrificantes LtdaDocument6 pagesBoletos NF 5891 - Lubricela Lubrificantes Ltdayascela2023No ratings yet
- Unicesumar - Atividade 04 - GODocument4 pagesUnicesumar - Atividade 04 - GOGabrielNo ratings yet