You might also like
- Operating Systems: Internals and Design Principles: Memory ManagementDocument41 pagesOperating Systems: Internals and Design Principles: Memory ManagementRamadan ElhendawyNo ratings yet
- Chapter 6 Memory ManagementDocument38 pagesChapter 6 Memory ManagementAhmed Ibrahim GhnnamNo ratings yet
- Chapter 6 - Memory ManagementDocument60 pagesChapter 6 - Memory Managementsibhat mequanintNo ratings yet
- Chapter 6 Memory ManagementDocument38 pagesChapter 6 Memory Managementahmedibrahimghnnam012No ratings yet
- Unit 7 ManagementDocument12 pagesUnit 7 ManagementCindy CortezNo ratings yet
- Q.1 Explain Memory Management Requirements?: - The Available Memory Is Generally Shared Among ADocument10 pagesQ.1 Explain Memory Management Requirements?: - The Available Memory Is Generally Shared Among ARamesh PandeyNo ratings yet
- What Is Memory ManagementDocument2 pagesWhat Is Memory Managementdigupathania25No ratings yet
- Mms 1Document33 pagesMms 1Aashi NegiNo ratings yet
- Os Chap3Document13 pagesOs Chap3Mohammad AhmadNo ratings yet
- Module 7 Memory ManagementDocument7 pagesModule 7 Memory ManagementnatsuNo ratings yet
- Memory Management RequirementsDocument3 pagesMemory Management RequirementsjjNo ratings yet
- 05 Handout 1 (PlatTech)Document2 pages05 Handout 1 (PlatTech)See HorseNo ratings yet
- Memory ManagementDocument20 pagesMemory Managementnehavj664No ratings yet
- Module3 22Document29 pagesModule3 22Sourav SamantarayNo ratings yet
- TOPIC THREE Computer PersonelDocument4 pagesTOPIC THREE Computer PersonelOigara Onwong'aNo ratings yet
- Chapter 3-Memory ManagementDocument40 pagesChapter 3-Memory ManagementArmoniem BezabihNo ratings yet
- OS Unit 4Document76 pagesOS Unit 4HARSHA VINAY KOTNI HU21CSEN0100574No ratings yet
- 3-Operating System StructureDocument27 pages3-Operating System StructuresyedAbdulNo ratings yet
- Memory ManagementDocument21 pagesMemory ManagementHyper MarketNo ratings yet
- Os - Memory Management in Operating SystemDocument10 pagesOs - Memory Management in Operating Systemluckysighania93No ratings yet
- Unit5 OsDocument20 pagesUnit5 Osईश्वर महालेNo ratings yet
- Technical Report New Updated (1) 2Document2 pagesTechnical Report New Updated (1) 2AdnanNo ratings yet
- OS 5 Memory ManagementDocument24 pagesOS 5 Memory ManagementRitesh KumarNo ratings yet
- MITC101Document42 pagesMITC101Rapchel EstrellaNo ratings yet
- Lecture 7 Memory and File Management by FQDocument29 pagesLecture 7 Memory and File Management by FQaina syafNo ratings yet
- CSC204 - Chapter 3.2 OS Performance Issue (Memory Management) - NewDocument40 pagesCSC204 - Chapter 3.2 OS Performance Issue (Memory Management) - NewanekumekNo ratings yet
- Unit 4Document41 pagesUnit 4Gaytri DhingraNo ratings yet
- Memory ManagementDocument127 pagesMemory ManagementGlrmnNo ratings yet
- Os11week PDFDocument37 pagesOs11week PDFAbdullahNo ratings yet
- Textual Learning Material - Module 4Document46 pagesTextual Learning Material - Module 4Amir Irfan SayedNo ratings yet
- Memory ManagementDocument17 pagesMemory ManagementAmicable YcotNo ratings yet
- Memory Management in Operating SystemDocument2 pagesMemory Management in Operating SystemEditor IJTSRDNo ratings yet
- Memory Management: Presented By:-Mr. P C Kaufa ND Computer Architecture and ServicingDocument38 pagesMemory Management: Presented By:-Mr. P C Kaufa ND Computer Architecture and ServicingGloria MatopeNo ratings yet
- Virtual MemoryDocument12 pagesVirtual MemoryTega victorNo ratings yet
- Unit 4-Memory MaangementDocument15 pagesUnit 4-Memory MaangementHabtieNo ratings yet
- MemoryManagement PDFDocument51 pagesMemoryManagement PDFrambabu mahatoNo ratings yet
- Ijser: Memory Management Techniques and Processes SchedulingDocument3 pagesIjser: Memory Management Techniques and Processes SchedulingNavNo ratings yet
- Os Unit-3 (Bca)Document19 pagesOs Unit-3 (Bca)Bot IdNo ratings yet
- OS Research ReportDocument7 pagesOS Research ReportNimra ShahNo ratings yet
- Bos Unit 3Document20 pagesBos Unit 3DEVIL KILLERNo ratings yet
- OS 2022 SolutionDocument37 pagesOS 2022 SolutionSachin SharmaNo ratings yet
- 18CSC205J Operating Systems-Unit-4Document110 pages18CSC205J Operating Systems-Unit-4Darsh RawatNo ratings yet
- 4.1. Basic Resources Managed by Operating SystemsDocument15 pages4.1. Basic Resources Managed by Operating SystemsShanmuga NathanNo ratings yet
- Unit 3Document8 pagesUnit 3Tejas DixitNo ratings yet
- Memory Management (Platform Technologies)Document43 pagesMemory Management (Platform Technologies)Luigi SeriñaNo ratings yet
- FragmentationDocument3 pagesFragmentationHARISHNo ratings yet
- Unit-2 OS Ch-1 CompleteDocument18 pagesUnit-2 OS Ch-1 CompleteVaibhavNo ratings yet
- Chapter 7 Virtual Memory p1Document33 pagesChapter 7 Virtual Memory p1ahmedibrahimghnnam012No ratings yet
- Operating SystemDocument44 pagesOperating SystemKunalNo ratings yet
- Unit VDocument129 pagesUnit VKHARDEKAR SUJALNo ratings yet
- CH07 - Memory ManagementDocument37 pagesCH07 - Memory ManagementTaufik Akbar WibowoNo ratings yet
- Operating System OverviewDocument23 pagesOperating System OverviewvanessaNo ratings yet
- Chapter 7 Virtual Memory Part-1Document33 pagesChapter 7 Virtual Memory Part-1Ahmed Ibrahim GhnnamNo ratings yet
- Chap 7Document44 pagesChap 7Naweed RahmaniNo ratings yet
- Process Address Space: Symbolic AddressesDocument10 pagesProcess Address Space: Symbolic AddressesManmeetNo ratings yet
- Memory ManagementDocument12 pagesMemory ManagementChetan Naik massandNo ratings yet
- Operating System Memory ManagementDocument7 pagesOperating System Memory ManagementNgatia SamNo ratings yet
- Virtual MemoryDocument4 pagesVirtual MemoryleoNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- CalibrationDocument9 pagesCalibrationLuis Gonzalez100% (1)
- Practice For The CISSP Exam: Steve Santy, MBA, CISSP IT Security Project Manager IT Networks and SecurityDocument13 pagesPractice For The CISSP Exam: Steve Santy, MBA, CISSP IT Security Project Manager IT Networks and SecurityIndrian WahyudiNo ratings yet
- Kinetic - Sculpture FirstDocument3 pagesKinetic - Sculpture FirstLeoNo ratings yet
- Case Study Sustainable ConstructionDocument5 pagesCase Study Sustainable ConstructionpraisethenordNo ratings yet
- HUAWEI OCS Business Process Description PDFDocument228 pagesHUAWEI OCS Business Process Description PDFdidier_oNo ratings yet
- Perkembangan Kurikulum USADocument25 pagesPerkembangan Kurikulum USAFadhlah SenifotoNo ratings yet
- 11 Technical Analysis & Dow TheoryDocument9 pages11 Technical Analysis & Dow TheoryGulzar AhmedNo ratings yet
- Black-Scholes Excel Formulas and How To Create A Simple Option Pricing Spreadsheet - MacroptionDocument8 pagesBlack-Scholes Excel Formulas and How To Create A Simple Option Pricing Spreadsheet - MacroptionDickson phiriNo ratings yet
- Microelectronic CircuitsDocument22 pagesMicroelectronic CircuitsarunnellurNo ratings yet
- Secured Steganography To Send Seceret Message: Project ID: 1029Document33 pagesSecured Steganography To Send Seceret Message: Project ID: 1029Pravat SatpathyNo ratings yet
- HR Associate - Job Description VFinalDocument2 pagesHR Associate - Job Description VFinalPamela CardozoNo ratings yet
- Professional Scrum Master I Simulator Test 1 PDFDocument8 pagesProfessional Scrum Master I Simulator Test 1 PDFRahul GandhiNo ratings yet
- Spectrofotometru SpectroDirect (De La Lovibond)Document360 pagesSpectrofotometru SpectroDirect (De La Lovibond)FlaviusNo ratings yet
- Ascc Catalog 2014-2016Document157 pagesAscc Catalog 2014-2016api-261615090No ratings yet
- E-WasteDocument18 pagesE-WasteNitinKotwarNo ratings yet
- Effects of Water, Sanitation and Hygiene (WASH) Education On Childhood Intestinal Parasitic Infections in Rural Dembiya, Northwest Ethiopia An Uncontrolled (2019) Zemi PDFDocument8 pagesEffects of Water, Sanitation and Hygiene (WASH) Education On Childhood Intestinal Parasitic Infections in Rural Dembiya, Northwest Ethiopia An Uncontrolled (2019) Zemi PDFKim NichiNo ratings yet
- Regional Directorate General of Public Finance of BucharestDocument8 pagesRegional Directorate General of Public Finance of BucharestAnna MarissNo ratings yet
- Solutions of 6390 Homework 4Document12 pagesSolutions of 6390 Homework 4mukesh.kgiri1791No ratings yet
- The Peripatetic Observer 2003Document10 pagesThe Peripatetic Observer 2003SUNY Geneseo Department of EnglishNo ratings yet
- Better Typing and Dictating PracticesDocument7 pagesBetter Typing and Dictating PracticesDiyansh JainNo ratings yet
- EI in NegotiationsDocument22 pagesEI in NegotiationspranajiNo ratings yet
- Arts & Science: Government First Grade College, AlavandiDocument5 pagesArts & Science: Government First Grade College, AlavandiAnonymous cyZVcDeNo ratings yet
- Golden Rule ReferencingDocument48 pagesGolden Rule Referencingmia2908No ratings yet
- Norman Perrin-What Is Redaction CriticismDocument96 pagesNorman Perrin-What Is Redaction Criticismoasis115100% (1)
- Doppler Weather RadarDocument35 pagesDoppler Weather RadarjosefalguerasNo ratings yet
- Five TemperamentDocument5 pagesFive TemperamentDhaivatPatelNo ratings yet
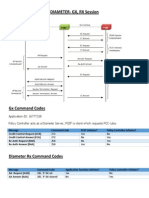
- S6a S13 GX RX InterfacesDocument4 pagesS6a S13 GX RX Interfacessyedsajjad68No ratings yet
- 12.22.08 Dr. King Quotes BookletDocument16 pages12.22.08 Dr. King Quotes BookletlamchunyienNo ratings yet
- Transportation Impact Handbook 2010Document246 pagesTransportation Impact Handbook 2010Enrique Márquez100% (1)
- Guide Specification - SDP 200: GeneralDocument10 pagesGuide Specification - SDP 200: GeneralhbookNo ratings yet