You might also like
- The Black Book of Azathoth S Ben QayinDocument32 pagesThe Black Book of Azathoth S Ben QayinCae Sar88% (59)
- XLR UserDemoDocument27 pagesXLR UserDemoSobhy GendykhelaNo ratings yet
- SAS IML User Guide PDFDocument1,108 pagesSAS IML User Guide PDFJorge Muñoz AristizabalNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Rating: 4.5 out of 5 stars4.5/5 (5)
- UNIT - 3 Advanced Algorithm PDFDocument29 pagesUNIT - 3 Advanced Algorithm PDFbharat emandiNo ratings yet
- Rakesh Ranjan ResumeDocument6 pagesRakesh Ranjan Resumesee2rakesh100% (1)
- Graph AlgorithmsDocument45 pagesGraph AlgorithmsSrinivas ANo ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- Test SanDocument11 pagesTest SanAndres Sotto67% (3)
- C Programming Mini ProjectDocument9 pagesC Programming Mini ProjectBijay AdhikariNo ratings yet
- Maximum Flow Problems: Flows and Cuts Augmenting Path AlgorithmDocument15 pagesMaximum Flow Problems: Flows and Cuts Augmenting Path AlgorithmTropa kong PalabanNo ratings yet
- Minimize Traffic Congestion: An Application of Maximum Flow in Dynamic NetworksDocument12 pagesMinimize Traffic Congestion: An Application of Maximum Flow in Dynamic NetworksRahmah Arie AgustiniNo ratings yet
- Image Segmentation Graph CutDocument35 pagesImage Segmentation Graph CutSubrat KabiNo ratings yet
- Small WorldDocument66 pagesSmall WorldJTNo ratings yet
- HW 3Document2 pagesHW 3AparaNo ratings yet
- Toolbox StatDocument32 pagesToolbox StatAbhimanyu singhNo ratings yet
- Assignment: Advance Routing and Protocol Topics: 1) Dijkstra'S Algorithm 2) Spanning Tree 3) Shortest PathDocument7 pagesAssignment: Advance Routing and Protocol Topics: 1) Dijkstra'S Algorithm 2) Spanning Tree 3) Shortest Pathmirubaig6781No ratings yet
- Sec 13Document11 pagesSec 13Zaw Zaw AungNo ratings yet
- Unit - 4 DAADocument29 pagesUnit - 4 DAApanimalarcsbs2021No ratings yet
- Minimum Cost Flow ProblemDocument39 pagesMinimum Cost Flow Problemashutosh pathakNo ratings yet
- Assignment 4 SolutionDocument7 pagesAssignment 4 SolutionEden teklemariamNo ratings yet
- Fundamentals of Dynamics of MDOF SystemsDocument28 pagesFundamentals of Dynamics of MDOF SystemsravikumarrampurNo ratings yet
- Clustering With Gradient Descent: 1 PerformanceDocument4 pagesClustering With Gradient Descent: 1 PerformanceChristine StraubNo ratings yet
- O/I Knapsack Problem: Design and Analysis of Algorithms Unit V Branch and BoundDocument11 pagesO/I Knapsack Problem: Design and Analysis of Algorithms Unit V Branch and BoundVasantha KumariNo ratings yet
- Measurement and Modelling IDocument36 pagesMeasurement and Modelling I23wingsNo ratings yet
- HW 3Document7 pagesHW 3BenNo ratings yet
- Flow Network SynopsisDocument1 pageFlow Network SynopsisSören WellhöferNo ratings yet
- Experimental Study 2Document4 pagesExperimental Study 2Rosie LiNo ratings yet
- 19 Flow II NotesDocument6 pages19 Flow II Notestemp_tsunNo ratings yet
- Distance Vector and Path Vector Rou3ng: Sec3ons 4.2.2., 4.3.2, 4.3.3Document25 pagesDistance Vector and Path Vector Rou3ng: Sec3ons 4.2.2., 4.3.2, 4.3.3Hari CNo ratings yet
- Problem Set 9Document5 pagesProblem Set 9Alex WangNo ratings yet
- CS70 MidtermDocument14 pagesCS70 MidtermDan GoodmanNo ratings yet
- Algorithms: CSE 202 - Homework IIDocument5 pagesAlgorithms: CSE 202 - Homework IIballechaseNo ratings yet
- The Shortest Path Between Two Nodes AMD Algorithm: School of Computers and Information EngineeringDocument20 pagesThe Shortest Path Between Two Nodes AMD Algorithm: School of Computers and Information EngineeringMalika SadullaevaNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument29 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsAbdullah AloglaNo ratings yet
- International Journal of Computer Networks & Communications (IJCNC)Document11 pagesInternational Journal of Computer Networks & Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Ekbis Picks1 MalikDocument14 pagesEkbis Picks1 MalikSyed Ibrahim Syed ahamed kabirNo ratings yet
- Group 1's Assignment: Welcome To OurDocument11 pagesGroup 1's Assignment: Welcome To Ourkhoa TruongNo ratings yet
- Matlab Solutions For Maxflow-Mincut and Ford Fulkerston AlgorithmDocument4 pagesMatlab Solutions For Maxflow-Mincut and Ford Fulkerston AlgorithmboramilNo ratings yet
- Algorithms and Data Structures Sample 3Document9 pagesAlgorithms and Data Structures Sample 3Hebrew JohnsonNo ratings yet
- Online and Streaming Algorithms For Clustering - UCSD - Lec6Document9 pagesOnline and Streaming Algorithms For Clustering - UCSD - Lec6Thuy NguyenNo ratings yet
- 15.082J and 6.855J and ESD.78J October 19, 2010: Max Flows 3 Preflow-Push AlgorithmsDocument33 pages15.082J and 6.855J and ESD.78J October 19, 2010: Max Flows 3 Preflow-Push AlgorithmseviroyerNo ratings yet
- Maximum Flow ProblemDocument21 pagesMaximum Flow ProblemDHANANJAY GOELNo ratings yet
- The Multi-Commodity Network Flow ProblemDocument2 pagesThe Multi-Commodity Network Flow ProblemStephen HartantoNo ratings yet
- Lect4 PDFDocument33 pagesLect4 PDFphysicsnewblolNo ratings yet
- Troyer Id Quantique 2012 A Randomness Extractor For The Quantis DeviceDocument7 pagesTroyer Id Quantique 2012 A Randomness Extractor For The Quantis DeviceMario GlieweNo ratings yet
- MIT6 046JS15 Pset7solsDocument7 pagesMIT6 046JS15 Pset7solsramNo ratings yet
- 5224 wk2Document18 pages5224 wk2Nagaraj Chandrashekar SiddeshwarNo ratings yet
- Management Science 461: - Network Flow Problems October 21, 2008Document12 pagesManagement Science 461: - Network Flow Problems October 21, 2008jumanNo ratings yet
- 4 Sampling Quantization 0809Document13 pages4 Sampling Quantization 0809maricela_eliz453No ratings yet
- Physics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFDocument24 pagesPhysics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFAmitanshu PandaNo ratings yet
- Network ModelsDocument17 pagesNetwork ModelsAodi NabothNo ratings yet
- Machine Design Practice MCQ Question With SolutionDocument13 pagesMachine Design Practice MCQ Question With SolutionPratik MondalNo ratings yet
- CP213: Tutorial Notebook 3Document1 pageCP213: Tutorial Notebook 3Bilal AhmadNo ratings yet
- A Microscopic Model of Resonant Double-Barrier Tunneling in A Quantum SystemDocument25 pagesA Microscopic Model of Resonant Double-Barrier Tunneling in A Quantum SystemIbnu SholehanNo ratings yet
- Random Tensor NetworkDocument35 pagesRandom Tensor NetworkSorin OpincariuNo ratings yet
- An Incremental Algorithm For The MaximumDocument16 pagesAn Incremental Algorithm For The Maximumrmshewale24No ratings yet
- Solutions To Assignment 4Document4 pagesSolutions To Assignment 4radin1No ratings yet
- Thomas' Calculus Early TranscendentalsDocument3 pagesThomas' Calculus Early TranscendentalssivaNo ratings yet
- Tutorial 2Document12 pagesTutorial 2Damera AjayNo ratings yet
- Computer Network Assignment HelpDocument8 pagesComputer Network Assignment HelpComputer Network Assignment Help100% (1)
- AUU Lec3Document4 pagesAUU Lec3ishaan20068No ratings yet
- Section-A: Course Code: 21ODMCH611 UID:D21MCA11642Document13 pagesSection-A: Course Code: 21ODMCH611 UID:D21MCA11642RishiNo ratings yet
- Routing Algorithms and Routing in The Internet: Network Layer 4-1Document44 pagesRouting Algorithms and Routing in The Internet: Network Layer 4-1Abhishek RegmiNo ratings yet
- 15.053 April 3, 2007: The Maximum Flow ProblemDocument47 pages15.053 April 3, 2007: The Maximum Flow ProblemEhsan SpencerNo ratings yet
- Omogen Heap: KTH Royal Institute of TechnologyDocument25 pagesOmogen Heap: KTH Royal Institute of TechnologyArthom ZMinecraftNo ratings yet
- rED bOOK - pASWORD WINDOWS 7Document4 pagesrED bOOK - pASWORD WINDOWS 7Raffaele NaPoLiNo ratings yet
- Passwor KubernetesDocument1 pagePasswor KubernetesRaffaele NaPoLiNo ratings yet
- Senior Software Engineer - REPORTDocument2 pagesSenior Software Engineer - REPORTRaffaele NaPoLiNo ratings yet
- Questionnaire For EGSDocument2 pagesQuestionnaire For EGSRaffaele NaPoLiNo ratings yet
- Test Engineer, BarcelonaDocument2 pagesTest Engineer, BarcelonaRaffaele NaPoLiNo ratings yet
- Sycl-1 2Document206 pagesSycl-1 2atom tuxNo ratings yet
- Vr-3000-3000s-Mol Om Eng 44374C PDFDocument58 pagesVr-3000-3000s-Mol Om Eng 44374C PDFTyo Frananda RadityoNo ratings yet
- Core JS PDFDocument257 pagesCore JS PDFcomedy,poems and motivational videos50% (2)
- Designing Better Indexes and Influencing DB2 On z/OS Index UsageDocument13 pagesDesigning Better Indexes and Influencing DB2 On z/OS Index UsagecaamancioNo ratings yet
- Arvind Jute Mill Product Mix Problem - Neelesh Kamath ePGP04C-060Document27 pagesArvind Jute Mill Product Mix Problem - Neelesh Kamath ePGP04C-060Neelesh KamathNo ratings yet
- MSI Bluetooth Dongle Installation GuideDocument8 pagesMSI Bluetooth Dongle Installation GuideMarc BengtssonNo ratings yet
- Operating Systems: Threads, SMP, and MicrokernelsDocument25 pagesOperating Systems: Threads, SMP, and MicrokernelsZiyad AhmedNo ratings yet
- EMPro Workshop 4.0Document140 pagesEMPro Workshop 4.0Michael Benhamou100% (1)
- A Neural Network Model For Electric PDFDocument6 pagesA Neural Network Model For Electric PDFR Adhitya ArNo ratings yet
- MR Robot S01E03 720p BluRay x264 ShAaNiG-eng SRTDocument55 pagesMR Robot S01E03 720p BluRay x264 ShAaNiG-eng SRTNight CrawlerNo ratings yet
- Chapter 2 - SVM (Support Vector Machine) - Theory - Machine Learning 101 - MediumDocument9 pagesChapter 2 - SVM (Support Vector Machine) - Theory - Machine Learning 101 - MediumSabha NayaghamNo ratings yet
- Error Invalidrestore PDFDocument2 pagesError Invalidrestore PDFJulieNo ratings yet
- Cache Project (12!09!10)Document9 pagesCache Project (12!09!10)Vishwa ShanikaNo ratings yet
- Bijivr: Biju Bhavan, Keleswaram, Kalliyoor P. O., Thiruvananthapuram - 42, Kerala. Email IdDocument6 pagesBijivr: Biju Bhavan, Keleswaram, Kalliyoor P. O., Thiruvananthapuram - 42, Kerala. Email IdBiji Velayudha RadhaNo ratings yet
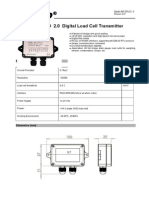
- RW-ST01D 2.0 ManualDocument5 pagesRW-ST01D 2.0 ManualUndibal Alejandro RivasNo ratings yet
- Torsional Reinforcement in R.C SlabDocument6 pagesTorsional Reinforcement in R.C SlabArnold TunduliNo ratings yet
- Eviews 5 Users Guide PDFDocument2 pagesEviews 5 Users Guide PDFFredNo ratings yet
- CRMDocument19 pagesCRMBanpreet GillNo ratings yet
- 10Document39 pages10Foesyay AtiqohNo ratings yet
- SAFE Key Features and TerminologyDocument74 pagesSAFE Key Features and TerminologyPAUC CAPAINo ratings yet
- Blended Gate Course Schedule: Contact: +91-844-844-0102 DateDocument27 pagesBlended Gate Course Schedule: Contact: +91-844-844-0102 DateBapiNo ratings yet
- Soundiron Voice of Rapture - The Alto - User Manual PDFDocument22 pagesSoundiron Voice of Rapture - The Alto - User Manual PDFBaba GeorgeNo ratings yet
- Technical Reference Guide: Product OverviewDocument114 pagesTechnical Reference Guide: Product OverviewRonny Kimer Fiestas VargasNo ratings yet
- LIST OF STUDENTS Mobiloitte 1Document3 pagesLIST OF STUDENTS Mobiloitte 1Ishika PatilNo ratings yet
- Julia Lang v0.4Document315 pagesJulia Lang v0.4gastromonoNo ratings yet