You might also like
- ARP Tables Lookup AlgorithmsDocument3 pagesARP Tables Lookup AlgorithmsDouglas ManginiNo ratings yet
- Memory Management in Vxworks and RtlinuxDocument12 pagesMemory Management in Vxworks and Rtlinuxpraveen_drdoNo ratings yet
- WR Firewall Programmers Guide 1.1 PDFDocument133 pagesWR Firewall Programmers Guide 1.1 PDFNitesh SinghNo ratings yet
- Protect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDocument7 pagesProtect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDouglas Galetti RibeiroNo ratings yet
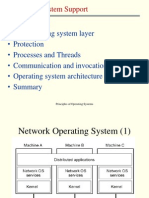
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78No ratings yet
- Vxworks Application Programmers Guide 6.7Document432 pagesVxworks Application Programmers Guide 6.7Charles J. BranscombeNo ratings yet
- Study of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRDocument6 pagesStudy of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRnishiNo ratings yet
- Vxworks Vs RTLinuxDocument5 pagesVxworks Vs RTLinuxNithin RamakrishnaNo ratings yet
- RTOS VxWorksDocument8 pagesRTOS VxWorksAshraful HimelNo ratings yet
- Embedded Systems: Theory and DesignDocument27 pagesEmbedded Systems: Theory and Designaashishkumarneelkant0% (1)
- Embedded Operating SystemsDocument34 pagesEmbedded Operating SystemssanssecoursNo ratings yet
- Vxworks Architecture Supplement 6.2Document252 pagesVxworks Architecture Supplement 6.2dmctekNo ratings yet
- VxWorks Programmers Guide5.5Document539 pagesVxWorks Programmers Guide5.5regyamata100% (1)
- Wind River VxWorks Platform 6.9 - OverviewDocument3 pagesWind River VxWorks Platform 6.9 - OverviewciruvekofNo ratings yet
- Architecture of (Vxworks) : Labview ProgramsDocument14 pagesArchitecture of (Vxworks) : Labview ProgramsRangaRaj100% (1)
- Comparison Between CPU Scheduling in VxWorks and RTLinuxDocument9 pagesComparison Between CPU Scheduling in VxWorks and RTLinuxx2y2z2rmNo ratings yet
- Exceptions Interrupts TimersDocument35 pagesExceptions Interrupts Timersmeena1827100% (1)
- RTOS & VxWorks FundamentalsDocument15 pagesRTOS & VxWorks Fundamentalsshailesh_verma35No ratings yet
- Network Automation Cookbook Pdf00002Document5 pagesNetwork Automation Cookbook Pdf00002Dang KhueNo ratings yet
- Vxworks Rtos: Embedded Systems-AssignmentDocument6 pagesVxworks Rtos: Embedded Systems-AssignmentPrashanth KumarNo ratings yet
- Hypervisor PDFDocument7 pagesHypervisor PDFGowri J BabuNo ratings yet
- Vxworks Real Time OsDocument6 pagesVxworks Real Time OsKomal AwasthiNo ratings yet
- Tornado 2 2 and VxWorks 5 5Document54 pagesTornado 2 2 and VxWorks 5 5Sreekanth LakkaNo ratings yet
- Lcu14 500armtrustedfirmware 140919105449 Phpapp02 PDFDocument10 pagesLcu14 500armtrustedfirmware 140919105449 Phpapp02 PDFDuy Phuoc NguyenNo ratings yet
- Why Use Embedded Linux For Real Time Embedded Systems Rev ADocument8 pagesWhy Use Embedded Linux For Real Time Embedded Systems Rev AJoemon John KurishumootillNo ratings yet
- Debugging The Linux Kernel With JTAGDocument7 pagesDebugging The Linux Kernel With JTAGranbumails100% (1)
- Vxworks For Pentium Architecture Supplement PDFDocument40 pagesVxworks For Pentium Architecture Supplement PDFNitesh SinghNo ratings yet
- Choosing Your Messaging Protocol AMQP, MQTT, or STOMPDocument3 pagesChoosing Your Messaging Protocol AMQP, MQTT, or STOMPBuggy BuggysNo ratings yet
- CAN Configuration Within AutosarDocument6 pagesCAN Configuration Within Autosarmail87523No ratings yet
- Vxworks Cli Tools Users Guide 6.7 PDFDocument94 pagesVxworks Cli Tools Users Guide 6.7 PDFelsinkiorNo ratings yet
- VLAN Basics PDFDocument4 pagesVLAN Basics PDFAnuja AroraNo ratings yet
- RTOS NewDocument83 pagesRTOS New110059No ratings yet
- Multimedia in Embedded Linux GuideDocument75 pagesMultimedia in Embedded Linux Guidedenkins2020No ratings yet
- Unit 1Document124 pagesUnit 1RaviNo ratings yet
- RtosDocument78 pagesRtossekinNo ratings yet
- Specifying Free-RTOS Scheduling RequirementsDocument15 pagesSpecifying Free-RTOS Scheduling RequirementsKvks SatishNo ratings yet
- QNX NeutrinoDocument2 pagesQNX NeutrinoAbdul WadoodNo ratings yet
- Remote Procedure Call IntroDocument4 pagesRemote Procedure Call IntrooparikokoNo ratings yet
- Rtems Installation ProcedureDocument6 pagesRtems Installation ProcedureConstantine Giotopoulos100% (1)
- Embedded Linux Course Slides PDFDocument571 pagesEmbedded Linux Course Slides PDFranbumailsNo ratings yet
- SystemC Primer 1 - 1Document79 pagesSystemC Primer 1 - 1Nguyễn Hữu TuyếnNo ratings yet
- Real Time Operating System IIDocument25 pagesReal Time Operating System IIsrgperumalNo ratings yet
- X-Windows Lab ManualDocument109 pagesX-Windows Lab ManualDeepika Singh100% (1)
- 6LowPAN ArchitectureDocument5 pages6LowPAN ArchitectureReiko11No ratings yet
- Linux GDB CommandsDocument10 pagesLinux GDB CommandsBipin JaiswalNo ratings yet
- Survey of RtosDocument17 pagesSurvey of Rtoskvamsee112100% (1)
- 300 901 DevcorDocument2 pages300 901 DevcorAgustin CicilianiNo ratings yet
- Embedded Linux OptimizationsDocument65 pagesEmbedded Linux Optimizationsmelvin45100% (1)
- Real-Time Operating Systems An Ongoing ReviewDocument4 pagesReal-Time Operating Systems An Ongoing Reviewsharath_rakkiNo ratings yet
- Vxworks Migration Guide 6.2Document212 pagesVxworks Migration Guide 6.2Vladimir RolbinNo ratings yet
- Basic Linux ArchitectureDocument11 pagesBasic Linux ArchitectureJyothy LakshuNo ratings yet
- Embedded Linux: Using Pee Wee LinuxDocument31 pagesEmbedded Linux: Using Pee Wee Linuxumnainar100% (1)
- QNX &nucleusDocument4 pagesQNX &nucleusmannu_papakiangelNo ratings yet
- International Electronics Directory '90: The Guide to European Manufacturers, Agents and ApplicationsFrom EverandInternational Electronics Directory '90: The Guide to European Manufacturers, Agents and ApplicationsC.G. WedgwoodNo ratings yet
- MPLS-Enabled Applications: Emerging Developments and New TechnologiesFrom EverandMPLS-Enabled Applications: Emerging Developments and New TechnologiesRating: 4 out of 5 stars4/5 (4)
- AxxonNext User GuideDocument453 pagesAxxonNext User GuideSebastian GrochowskiNo ratings yet
- Manual Utilizare Monitor Curbat SamsungDocument28 pagesManual Utilizare Monitor Curbat SamsungdonosadNo ratings yet
- Huawei Enterprise Network CloudEngine S Series Campus Switch Portfolio - Print - A0Document4 pagesHuawei Enterprise Network CloudEngine S Series Campus Switch Portfolio - Print - A0adityabpNo ratings yet
- Huawei CloudEngine 6863E Switch DatasheetDocument13 pagesHuawei CloudEngine 6863E Switch DatasheetJuan Francisco AriasNo ratings yet
- CZIDBVN Opcode ChartDocument1 pageCZIDBVN Opcode ChartMartin ZacharyNo ratings yet
- 3303Document28 pages3303gienkasNo ratings yet
- Hybris Administration Console - FlexibleSearchDocument459 pagesHybris Administration Console - FlexibleSearchYassine MecherguiNo ratings yet
- Bugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Document34 pagesBugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Setyo WatiNo ratings yet
- LogDocument1,081 pagesLogoktaaye224No ratings yet
- Readme P006Document7 pagesReadme P006paras99No ratings yet
- MS-7091 M-ATX MainboardDocument25 pagesMS-7091 M-ATX Mainboardstrangelove91No ratings yet
- Manual PEGASOS2 EnglishDocument13 pagesManual PEGASOS2 EnglishayranayranNo ratings yet
- Debian GNU/Linux Installation GuideDocument123 pagesDebian GNU/Linux Installation GuideQaisNo ratings yet
- Conda CheatsheetDocument1 pageConda Cheatsheetprerit_tNo ratings yet
- S7 SFC PDFDocument710 pagesS7 SFC PDFjunior2108No ratings yet
- The software tools that enable user interaction are called applicationsDocument7 pagesThe software tools that enable user interaction are called applicationshinaavermaNo ratings yet
- 1990 Benchmarq Data BookDocument306 pages1990 Benchmarq Data BookJonasFilbertNo ratings yet
- DatasheetDocument1 pageDatasheetStuxnetNo ratings yet
- Azure FundamentalsDocument59 pagesAzure FundamentalsYulian Sani100% (1)
- RICO Wireless Irrigation Controller 16/48 ZonesDocument2 pagesRICO Wireless Irrigation Controller 16/48 ZonesmhofuNo ratings yet
- Core Java Meterial PDFDocument203 pagesCore Java Meterial PDFrajesh gantaNo ratings yet
- Smart AC User ManualDocument12 pagesSmart AC User ManualOscar Andres Agudelo MedinaNo ratings yet
- Centralizable Traffic Controller: General Characteristics Main FunctionsDocument3 pagesCentralizable Traffic Controller: General Characteristics Main FunctionsjackyNo ratings yet
- Import Public Class Public Static Void Null Double Int Try New in Out Out OutDocument8 pagesImport Public Class Public Static Void Null Double Int Try New in Out Out OutfikrueNo ratings yet
- Raspberry Pi Literature ReviewDocument7 pagesRaspberry Pi Literature Reviewafmzrvaxhdzxjs100% (1)
- Fundamental Programming ConceptsDocument32 pagesFundamental Programming ConceptsAgus PrasetyoNo ratings yet
- Interfacing GLCD With LPC2148 ARM: Arm How-To GuideDocument21 pagesInterfacing GLCD With LPC2148 ARM: Arm How-To GuideShubham JadhavNo ratings yet
- Quotation of Laptops in Sri LankaDocument4 pagesQuotation of Laptops in Sri LankalinkdanuNo ratings yet
- This Study Resource Was: EC-2 Regular Sample SolutionsDocument3 pagesThis Study Resource Was: EC-2 Regular Sample SolutionsRajesh BhardwajNo ratings yet
- LSMW Step by StepDocument5 pagesLSMW Step by StepPavan KocherlakotaNo ratings yet