You might also like
- Application-Specific Integrated Circuit ASIC A Complete GuideFrom EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNo ratings yet
- Real Time Operating System A Complete Guide - 2020 EditionFrom EverandReal Time Operating System A Complete Guide - 2020 EditionNo ratings yet
- GPUProgramming TalkDocument18 pagesGPUProgramming TalkRamuNo ratings yet
- Introduction To Gpu Programming With Cuda and OpenaccDocument40 pagesIntroduction To Gpu Programming With Cuda and OpenaccplopNo ratings yet
- Lecture 0: Cpus and Gpus: Prof. Mike GilesDocument36 pagesLecture 0: Cpus and Gpus: Prof. Mike GilesAashishNo ratings yet
- GPUDocument17 pagesGPUJayanti SinghNo ratings yet
- Unit 1Document12 pagesUnit 1Pranjul Kushwaha100% (1)
- Embd Course Pamplet - 3 - 4monthsDocument2 pagesEmbd Course Pamplet - 3 - 4monthsThanigai Arasu RuthirakottiNo ratings yet
- Assignment 1Document3 pagesAssignment 1JAYAPAL MNo ratings yet
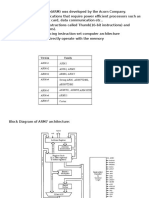
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set ArchitecturebalaNo ratings yet
- LPC 2378 Development BoardDocument160 pagesLPC 2378 Development BoardDinesh KumarNo ratings yet
- Dual Core Vs Core 2 DuoDocument5 pagesDual Core Vs Core 2 DuogermainjulesNo ratings yet
- Embedded Syllabus With C ClassDocument3 pagesEmbedded Syllabus With C ClassRakesh RakiNo ratings yet
- R05 411104ertsDocument8 pagesR05 411104ertsravitejakotiNo ratings yet
- Real Time Systems NotesDocument127 pagesReal Time Systems NotesVijay Kumar100% (1)
- Introduction To MicroprocessorDocument31 pagesIntroduction To MicroprocessorMuhammad DawoodNo ratings yet
- The Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItDocument11 pagesThe Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItsaadawarNo ratings yet
- VLSI Lecture02 OpenIDEA (정무경)Document69 pagesVLSI Lecture02 OpenIDEA (정무경)Vinit PatelNo ratings yet
- Unit 1Document124 pagesUnit 1RaviNo ratings yet
- Microcontrollers and Embedded SystemsDocument35 pagesMicrocontrollers and Embedded SystemsTarek BarhoumNo ratings yet
- Modified Embedded Processors - TE (E&TC) PDFDocument4 pagesModified Embedded Processors - TE (E&TC) PDFbalaji_gawalwad9857No ratings yet
- EC6703 Embedded and Real Time SystemsDocument168 pagesEC6703 Embedded and Real Time Systemsramkumar100% (1)
- FinalDocument178 pagesFinalBiki JhaNo ratings yet
- SystemC Primer 1 - 1Document79 pagesSystemC Primer 1 - 1Nguyễn Hữu TuyếnNo ratings yet
- 21CS43 - Module 1Document21 pages21CS43 - Module 1EMMANUEL RAJARATHNAMNo ratings yet
- Debugging Assembly Code With GDBDocument3 pagesDebugging Assembly Code With GDBmrcatyahoocomNo ratings yet
- Win862 User ManualDocument9 pagesWin862 User ManualktweiNo ratings yet
- Gpu1 - GPU IntroductionDocument20 pagesGpu1 - GPU IntroductionRichik DuttaNo ratings yet
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Document69 pagesProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_No ratings yet
- Ai Important Questions For Semester ExamsDocument197 pagesAi Important Questions For Semester ExamsDeepak YaduvanshiNo ratings yet
- ECE4003 Embedded System Design Course OverviewDocument3 pagesECE4003 Embedded System Design Course OverviewGrace ARORANo ratings yet
- Selecting Criteria of A MotherboardDocument3 pagesSelecting Criteria of A MotherboardDa NishNo ratings yet
- Multi ThreadingDocument168 pagesMulti ThreadingSandeep AlajangiNo ratings yet
- Lessons Learnt from Project Report on Verilog Model CheckingDocument3 pagesLessons Learnt from Project Report on Verilog Model CheckingVinit PatelNo ratings yet
- 006 I2C Bus ProtocolDocument16 pages006 I2C Bus Protocolcoolkunal77100% (1)
- RtosDocument42 pagesRtospipul36No ratings yet
- OpenPLC - An Opensource Alternative For AutomationDocument5 pagesOpenPLC - An Opensource Alternative For AutomationThiago Alves100% (1)
- VLSI Design: 2 To 4 DecoderDocument1 pageVLSI Design: 2 To 4 DecoderohgiggitygooNo ratings yet
- PIC MicrocontrollersDocument40 pagesPIC MicrocontrollersRamaDinakaranNo ratings yet
- GCC Profile Guided OptimizationDocument47 pagesGCC Profile Guided OptimizationTuxology.netNo ratings yet
- 80486Document21 pages80486Khadar Nawas0% (1)
- Introduction to Arduino and LEDsDocument33 pagesIntroduction to Arduino and LEDsReda FakihNo ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsKavitha SubramaniamNo ratings yet
- Quiz Chapter 4 CPUDocument3 pagesQuiz Chapter 4 CPUAnthony PistonNo ratings yet
- Evaluation of Microprocessor PDFDocument2 pagesEvaluation of Microprocessor PDFJennifer100% (1)
- Digital Camera CasestudyDocument57 pagesDigital Camera CasestudyAnonymous aLRiBR100% (1)
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Intel Core 2 Duo Processor GuideDocument22 pagesIntel Core 2 Duo Processor GuideGowtham Kodavati100% (1)
- Unit 1 Introduction To Embedded System Design PDFDocument99 pagesUnit 1 Introduction To Embedded System Design PDFNIDHI. R .SINGH100% (1)
- Write The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViDocument6 pagesWrite The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViashokNo ratings yet
- Advanced Embedded System Design: Project ReportDocument7 pagesAdvanced Embedded System Design: Project ReportSyed Akhlaq100% (1)
- COE4DS4 Lab #2 Introduction To Embedded Software For The NIOS II ProcessorDocument7 pagesCOE4DS4 Lab #2 Introduction To Embedded Software For The NIOS II Processormacmaster69No ratings yet
- Master and Command C For PIC MCUsDocument1 pageMaster and Command C For PIC MCUsmartinez_cvmNo ratings yet
- EE6403 DSP Hand Written NotesDocument282 pagesEE6403 DSP Hand Written Notessyed ibrahim100% (1)
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyDocument45 pagesP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaNo ratings yet
- PIC MicrocontrollerDocument27 pagesPIC Microcontrollermuthai100% (1)
- International Journal of Embedded Systems and Applications (IJESA)Document1 pageInternational Journal of Embedded Systems and Applications (IJESA)ijesajournalNo ratings yet
- GTU Microcontroller Embedded Systems CourseDocument2 pagesGTU Microcontroller Embedded Systems CourseAshok ShahNo ratings yet
- The End Of Printed NewspaperDocument12 pagesThe End Of Printed NewspaperMarcelo AraujoNo ratings yet
- High HopesDocument17 pagesHigh HopesMarcelo AraujoNo ratings yet
- 1 Icebreaker Questions - Inter 1Document3 pages1 Icebreaker Questions - Inter 1Marcelo AraujoNo ratings yet
- S She Writes A Book. SS, X, CH, SH, o He Goes To College Consonant + Y The Airplane FliesDocument3 pagesS She Writes A Book. SS, X, CH, SH, o He Goes To College Consonant + Y The Airplane FliesMarcelo AraujoNo ratings yet
- TettDocument1 pageTettDaniel AdebayoNo ratings yet
- FILTERDocument5 pagesFILTERMarcelo AraujoNo ratings yet
- New EM1Document24 pagesNew EM1cooldude99344No ratings yet
- Proceeding Series of The Brazilian Society of Applied and Computational Mathematics, Vol. 1, N. 1, 2013Document6 pagesProceeding Series of The Brazilian Society of Applied and Computational Mathematics, Vol. 1, N. 1, 2013Marcelo AraujoNo ratings yet
- LPI PH PDFDocument4 pagesLPI PH PDFHumberto Tapias CutivaNo ratings yet
- PB ManualDocument23 pagesPB ManualwilyNo ratings yet
- Earned Value Analysis 8 StepsDocument8 pagesEarned Value Analysis 8 StepsHira RazzaqNo ratings yet
- Itp Concrete CoatingDocument4 pagesItp Concrete Coatingkaml100% (1)
- Dual Domain Image Encryption Using Bit Plane Scrambling and Sub - Band ScramblingDocument16 pagesDual Domain Image Encryption Using Bit Plane Scrambling and Sub - Band Scramblingraja rishyantNo ratings yet
- Cement and Concrete Research: Amin Abrishambaf, Mário Pimentel, Sandra NunesDocument13 pagesCement and Concrete Research: Amin Abrishambaf, Mário Pimentel, Sandra NunesJoseluis Dejesus AnguloNo ratings yet
- Installation, Operation and Maintenance Instructions For 9957W Automatic Balancing ValveDocument2 pagesInstallation, Operation and Maintenance Instructions For 9957W Automatic Balancing ValveManuel Molina CamposNo ratings yet
- Legal Documents Evidence in Safety Related Proceedings 1663086621Document9 pagesLegal Documents Evidence in Safety Related Proceedings 1663086621richardNo ratings yet
- Introduction to S.G. Iron Casting IndustryDocument30 pagesIntroduction to S.G. Iron Casting Industryavnishchauhan8_46499100% (1)
- Mumbai: City of DreamsDocument14 pagesMumbai: City of DreamsAnika WahalNo ratings yet
- Class Xii Appendix-Iii: Colligative PropertiesDocument3 pagesClass Xii Appendix-Iii: Colligative PropertiesSrijan JaiswalNo ratings yet
- Carlo Gavazzi EM26-96Document4 pagesCarlo Gavazzi EM26-96dimis trumpasNo ratings yet
- Impact of Sugarcane Molasses in Concrete As Time Retarding and Water Reducing AdmixtureDocument131 pagesImpact of Sugarcane Molasses in Concrete As Time Retarding and Water Reducing AdmixtureMohamed MoralesNo ratings yet
- Review of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesDocument6 pagesReview of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesWilliam TortorielloNo ratings yet
- EL FILI CHAPTER 13Document9 pagesEL FILI CHAPTER 13Eduardo Sismundo JrNo ratings yet
- Letter of Request For Brgy. ProfileDocument2 pagesLetter of Request For Brgy. ProfileRhea Mae MacabodbodNo ratings yet
- LP Lab ManuelDocument23 pagesLP Lab ManuelRavi Kumar LankeNo ratings yet
- Biotensegrity and Myofascial Chains A Global Approach To An Integrated Kinetic ChainDocument8 pagesBiotensegrity and Myofascial Chains A Global Approach To An Integrated Kinetic ChainMohamed ElMeligieNo ratings yet
- Gabriel MarcelDocument6 pagesGabriel MarcelCeciBohoNo ratings yet
- Conversion Cycle (Process Cost) : Rizal Technological UniversityDocument25 pagesConversion Cycle (Process Cost) : Rizal Technological UniversityHatdogNo ratings yet
- Solar Pump Inverter PV100 PV200 User Manuel Rev1Document49 pagesSolar Pump Inverter PV100 PV200 User Manuel Rev1faitgpsNo ratings yet
- Android Activity Lifecycle OverviewDocument8 pagesAndroid Activity Lifecycle OverviewMario FedericiNo ratings yet
- Quotation SS20230308 100KVAR APFC PANEL VIDHYA WIRESDocument4 pagesQuotation SS20230308 100KVAR APFC PANEL VIDHYA WIRESsunil halvadiyaNo ratings yet
- ESBG Financial Systems Difference EU-US PDFDocument12 pagesESBG Financial Systems Difference EU-US PDFDominiqueCarriouNo ratings yet
- Flat Slab NoteDocument4 pagesFlat Slab NotesasiNo ratings yet
- Growatt Warranty Procedure - 07-09-2020Document9 pagesGrowatt Warranty Procedure - 07-09-2020Design TeamNo ratings yet
- 10-09 Oct-Eng-NLDocument4 pages10-09 Oct-Eng-NLdhammadinnaNo ratings yet
- Position Paper For The Art Controversy "Poleteismo" of Mideo CruzDocument2 pagesPosition Paper For The Art Controversy "Poleteismo" of Mideo CruzAalayah Gwendel Wayne CarumbaNo ratings yet
- Asme A112.4.14-2004 PDFDocument14 pagesAsme A112.4.14-2004 PDFAmer AmeryNo ratings yet
- CaracterizacióndeSalpicadurasSMAW Molleda 2007Document5 pagesCaracterizacióndeSalpicadurasSMAW Molleda 2007Tamara Maria Ortiz MendezNo ratings yet