0% found this document useful (0 votes)
153 views41 pagesDigital System Design
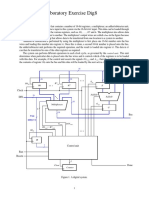
This document describes the implementation of a bus structure using tri-state drivers or multiplexers to connect registers. It provides Verilog code for a register swap module that uses a finite state machine (FSM) and tri-state drivers or multiplexers to swap the contents of three registers (R1, R2, R3) through a common bus. The code defines the FSM states and control signals, instantiates register modules, and specifies the bus wiring based on the FSM state using tri-state drivers or multiplexers.
Uploaded by
Mohit VermaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
153 views41 pagesDigital System Design
This document describes the implementation of a bus structure using tri-state drivers or multiplexers to connect registers. It provides Verilog code for a register swap module that uses a finite state machine (FSM) and tri-state drivers or multiplexers to swap the contents of three registers (R1, R2, R3) through a common bus. The code defines the FSM states and control signals, instantiates register modules, and specifies the bus wiring based on the FSM state using tri-state drivers or multiplexers.
Uploaded by
Mohit VermaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd