You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Wipro Offer LetterDocument14 pagesWipro Offer Lettertapan kumar singhaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Burke - Oxidizing and Reducing AgentsDocument607 pagesBurke - Oxidizing and Reducing AgentscapranzoloNo ratings yet
- Kingsbridge Armory Request For Proposals 2011 FF 1 11 12Document54 pagesKingsbridge Armory Request For Proposals 2011 FF 1 11 12xoneill7715No ratings yet
- ANSI B16.9, ANSI B16.28, MSS-SP-43, MSS-SP-95, MSS-SP-97: 45° LR Elbows 90° LR ElbowsDocument5 pagesANSI B16.9, ANSI B16.28, MSS-SP-43, MSS-SP-95, MSS-SP-97: 45° LR Elbows 90° LR ElbowsMAZM17No ratings yet
- Incad Tutorial Using Autodesk Inventor: Motor Bracket ModelDocument10 pagesIncad Tutorial Using Autodesk Inventor: Motor Bracket ModelMAZM17No ratings yet
- Index: General DescriptionDocument49 pagesIndex: General DescriptionMAZM17No ratings yet
- AEROQUIP Quick - Disconnect - Couplngs - EDocument78 pagesAEROQUIP Quick - Disconnect - Couplngs - EMAZM17No ratings yet
- Product Overview: Features: Applications: Also AvailableDocument2 pagesProduct Overview: Features: Applications: Also AvailableMAZM17No ratings yet
- 1,100 - 2,200# Dexter Torflex Axles Assembly #9: Made To OrderDocument1 page1,100 - 2,200# Dexter Torflex Axles Assembly #9: Made To OrderMAZM17No ratings yet
- Parker Flow Control Valves PDFDocument4 pagesParker Flow Control Valves PDFMAZM17No ratings yet
- Eaton Hydraulics Relief ValvesDocument4 pagesEaton Hydraulics Relief ValvesMAZM17No ratings yet
- LockWire PDFDocument3 pagesLockWire PDFMAZM17No ratings yet
- Parker Flow Control Valves PDFDocument4 pagesParker Flow Control Valves PDFMAZM17No ratings yet
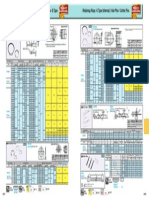
- Seguros R - Hairpin Cotter Pin p2017Document1 pageSeguros R - Hairpin Cotter Pin p2017MAZM17No ratings yet
- 1328866787Chp 2 - Residence and Scope of Total IncomeDocument5 pages1328866787Chp 2 - Residence and Scope of Total IncomeMohiNo ratings yet
- Marketing Ch3Document33 pagesMarketing Ch3Eslam RaslanNo ratings yet
- SivaKumar CVDocument5 pagesSivaKumar CVRajasekhar MarellaNo ratings yet
- Mep Risk AssessmentDocument2 pagesMep Risk AssessmentIm Chinith100% (1)
- Memory Sports RTVDocument13 pagesMemory Sports RTVAgit PermanaNo ratings yet
- Asas Kebersihan Makanan KKMDocument6 pagesAsas Kebersihan Makanan KKMMario RushdeeNo ratings yet
- Networking Straight-Through and Cross OverDocument25 pagesNetworking Straight-Through and Cross OverJan GolimanNo ratings yet
- Course No: FMPE-358 Course Title: Farm Machinery and Equipment-I Credits: 2 (1+1) Semester:-V TheoryDocument38 pagesCourse No: FMPE-358 Course Title: Farm Machinery and Equipment-I Credits: 2 (1+1) Semester:-V TheoryMrunali GaikwadNo ratings yet
- Roles Responsibilities A Handbook For CGST OfficersDocument64 pagesRoles Responsibilities A Handbook For CGST OfficersHr legaladviserNo ratings yet
- Commander SK Industrial Overview BrochureDocument8 pagesCommander SK Industrial Overview BrochureSteinþór Bjarni GrímssonNo ratings yet
- CHF Impact Assessment Somali RegionDocument58 pagesCHF Impact Assessment Somali RegionYousuf INo ratings yet
- Solved Assignment Ms - 95 Dec 2013Document7 pagesSolved Assignment Ms - 95 Dec 2013Anu K PeterNo ratings yet
- Quotation Details: 100% Within 30 Days of Stfy RCPT of Matl at SiteDocument1 pageQuotation Details: 100% Within 30 Days of Stfy RCPT of Matl at SiteNapoleon DasNo ratings yet
- Mrunal (Misc PDFDocument10 pagesMrunal (Misc PDFPiyush GoyalNo ratings yet
- Salary Report Enterprise Architecture 2Document12 pagesSalary Report Enterprise Architecture 2osNo ratings yet
- Deed of Absolute Sale-CantilangDocument3 pagesDeed of Absolute Sale-CantilangrodneyNo ratings yet
- List of Cases For Quiz No 4 With DigestDocument11 pagesList of Cases For Quiz No 4 With DigestDawn JessaNo ratings yet
- Workers' Education in The Global SouthDocument218 pagesWorkers' Education in The Global SouthpagieljcgmailcomNo ratings yet
- RA9293Document11 pagesRA9293Joseph LizadaNo ratings yet
- CHP 6. Cost Sheet - CapranavDocument14 pagesCHP 6. Cost Sheet - CapranavMonikaNo ratings yet
- Agile Teamwork - Minimize HandoffsDocument3 pagesAgile Teamwork - Minimize HandoffsAlan MasonNo ratings yet
- FM PDFDocument1 pageFM PDFnes2130No ratings yet
- Crop Protection 51-15 - Insect Pest Control - Plant HealthDocument36 pagesCrop Protection 51-15 - Insect Pest Control - Plant HealthDarwin M. CacalNo ratings yet
- Pertemuan 4. KewirausahaanDocument27 pagesPertemuan 4. KewirausahaanSalsabila LuthfiNo ratings yet
- Canon Ir3300 BrochureDocument6 pagesCanon Ir3300 BrochurenazmiNo ratings yet
- Project Management For Managers My Notes 1Document27 pagesProject Management For Managers My Notes 1DaisyNo ratings yet
- MGE Galaxy 7000: Installation ManualDocument68 pagesMGE Galaxy 7000: Installation ManualEng M ElseaidyNo ratings yet