You might also like
- Knowledge Based and Neural Network LearningDocument6 pagesKnowledge Based and Neural Network LearningMehlakNo ratings yet
- CH 2. Learning Processes: (N) e (N) D (N) - y (N)Document11 pagesCH 2. Learning Processes: (N) e (N) D (N) - y (N)casio2008No ratings yet
- 2806 Neural Computation Learning Processes: 2005 Ari VisaDocument44 pages2806 Neural Computation Learning Processes: 2005 Ari VisaKarim BakhNo ratings yet
- Learning Processes: T.Sunil ChowdaryDocument44 pagesLearning Processes: T.Sunil ChowdarySrinu SrinivasNo ratings yet
- Slide02 Haykin Chapter 2: Learning ProcessesDocument15 pagesSlide02 Haykin Chapter 2: Learning Processeshossein_khoNo ratings yet
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Document14 pagesMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)harutyunNo ratings yet
- Q: What Is ANN?: X H X H X H X X X HDocument9 pagesQ: What Is ANN?: X H X H X H X X X HMuhammad Ahsan AkhtarNo ratings yet
- Introduction To Artificial Neural NetworkDocument42 pagesIntroduction To Artificial Neural NetworkRezaBachtiar100% (1)
- MachineLearning Lecture 2Document23 pagesMachineLearning Lecture 2amjad tamishNo ratings yet
- 5 PCA Involves ChangingDocument2 pages5 PCA Involves Changingbeng olofsunNo ratings yet
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Document14 pagesMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)dollsicecreamNo ratings yet
- AI Lec-Module-IIIDocument102 pagesAI Lec-Module-IIIhimadeepthi sayaniNo ratings yet
- Learning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Document22 pagesLearning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Mustefa MohammedNo ratings yet
- Learning Rules: This Definition of The Learning Process Implies The Following Sequence of EventsDocument11 pagesLearning Rules: This Definition of The Learning Process Implies The Following Sequence of Eventsshrilaxmi bhatNo ratings yet
- Presentation On Neural NetworksDocument46 pagesPresentation On Neural NetworksnavinsehgalNo ratings yet
- Machine Learning CNNDocument28 pagesMachine Learning CNNabcd efghNo ratings yet
- 2-Mathematical Optimization and Deep LearningDocument53 pages2-Mathematical Optimization and Deep Learningعزام صالحNo ratings yet
- Chapter 9 - ANNsDocument25 pagesChapter 9 - ANNsd4rx5wsrw5No ratings yet
- CH 6 LearningDocument14 pagesCH 6 LearninggaurabNo ratings yet
- Introduction To Machine Learning: Ning Xiong Mälardalen UniversityDocument23 pagesIntroduction To Machine Learning: Ning Xiong Mälardalen UniversityNicholas LoganNo ratings yet
- EDM21 Paper 39Document6 pagesEDM21 Paper 39vinayakkharadi14No ratings yet
- Chapter 7 - Neural-NetworksDocument60 pagesChapter 7 - Neural-NetworksBulmi Hilme100% (1)
- Learning ProcessDocument54 pagesLearning Processnourhan fahmyNo ratings yet
- Machine Learning and Eural EtworkDocument21 pagesMachine Learning and Eural EtworkRedmond R. Shamshiri100% (1)
- 44 One of TheDocument2 pages44 One of TheАнтонNo ratings yet
- Lect3 UWA PDFDocument73 pagesLect3 UWA PDFअंकित शर्माNo ratings yet
- Unit 1Document61 pagesUnit 1GowthamUcekNo ratings yet
- Basic Concepts Network Architecture Learning Process Backpropagation Networks Self-Organizing Maps (Networks) Hopfield NetworkDocument9 pagesBasic Concepts Network Architecture Learning Process Backpropagation Networks Self-Organizing Maps (Networks) Hopfield NetworkArjun PalaniappanNo ratings yet
- Introduction To Predictive LearningDocument101 pagesIntroduction To Predictive LearningVivek KumarNo ratings yet
- Neural Networks: Eric Postma Ikat Universiteit MaastrichtDocument91 pagesNeural Networks: Eric Postma Ikat Universiteit Maastrichtsusheel_uiitshimlaNo ratings yet
- Perceptron LearningDocument19 pagesPerceptron LearningWorkagegn TatekNo ratings yet
- 6.1-Fundamentals of Artificial Neural NetworksDocument12 pages6.1-Fundamentals of Artificial Neural NetworksAbdullah KhanNo ratings yet
- Machine LearningDocument6 pagesMachine LearningSushmita MhamaneNo ratings yet
- Soft Computing Unit-2Document61 pagesSoft Computing Unit-2namak sung loNo ratings yet
- Artificial Neural Network (ANN) : Duration: 8 Hrs OutlineDocument61 pagesArtificial Neural Network (ANN) : Duration: 8 Hrs Outlineanhtu9_910280373No ratings yet
- Artificial Intelligence and Machine LearningDocument51 pagesArtificial Intelligence and Machine LearningFaizNo ratings yet
- The Categories of Neural Network Learning RulesDocument7 pagesThe Categories of Neural Network Learning RulesnancusharmaNo ratings yet
- Shallow Neural NetworkDocument152 pagesShallow Neural NetworkSreetam GangulyNo ratings yet
- Chapter 1 Introduction To Neural Network and Machine LearningDocument16 pagesChapter 1 Introduction To Neural Network and Machine Learningsamisey316No ratings yet
- Machine Learning OverviewDocument54 pagesMachine Learning OverviewRamakrishnaRao SoogooriNo ratings yet
- Kagan Lecture1Document103 pagesKagan Lecture1Narendra SinghNo ratings yet
- Artificial Neural NetworksDocument50 pagesArtificial Neural NetworksRiyujamalNo ratings yet
- Cart-Pole Balancing With Deep Q Network (DQN) : The ObjectiveDocument1 pageCart-Pole Balancing With Deep Q Network (DQN) : The Objective01689373477No ratings yet
- Applicable Artificial Intelligence: Introduction To Neural NetworksDocument36 pagesApplicable Artificial Intelligence: Introduction To Neural Networksmuhammed suhailNo ratings yet
- Deep Learning Lecture 0 Introduction Alexander TkachenkoDocument31 pagesDeep Learning Lecture 0 Introduction Alexander TkachenkoMahmood KohansalNo ratings yet
- Farkas Image Classif NNDocument32 pagesFarkas Image Classif NNGomesGilzamirNo ratings yet
- SDS Deep Learning For Spatial ApplicationDocument47 pagesSDS Deep Learning For Spatial ApplicationMIKATAgung JalaludinNo ratings yet
- ST M Hdstat RNN Deep LearningDocument17 pagesST M Hdstat RNN Deep LearningArif RahmanNo ratings yet
- Notes Artificial Intelligence Unit 5Document11 pagesNotes Artificial Intelligence Unit 5Goku KumarNo ratings yet
- Data Mining CS4168 Lecture 5 Basics of Classification 1Document25 pagesData Mining CS4168 Lecture 5 Basics of Classification 1alina sheikhNo ratings yet
- An Introduction To Neural Networks: Instituto Tecgraf PUC-Rio Nome: Fernanda Duarte Orientador: Marcelo GattassDocument45 pagesAn Introduction To Neural Networks: Instituto Tecgraf PUC-Rio Nome: Fernanda Duarte Orientador: Marcelo GattassGiGa GFNo ratings yet
- Daa Unit IvDocument112 pagesDaa Unit Ivdjalok190109No ratings yet
- Unit - 4Document26 pagesUnit - 4UNISA SAKHANo ratings yet
- Introduction To ML Partial 2 PDFDocument54 pagesIntroduction To ML Partial 2 PDFLesocrateNo ratings yet
- 2.1 Representing Neural NetworksDocument40 pages2.1 Representing Neural NetworksyagoencuestasNo ratings yet
- Artificial Neural Networks - : IntroductionDocument19 pagesArtificial Neural Networks - : IntroductionJOYNo ratings yet
- Hybrid Neural Networks: Fundamentals and Applications for Interacting Biological Neural Networks with Artificial Neuronal ModelsFrom EverandHybrid Neural Networks: Fundamentals and Applications for Interacting Biological Neural Networks with Artificial Neuronal ModelsNo ratings yet
- Convolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryFrom EverandConvolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryNo ratings yet
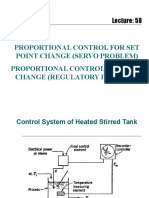
- Proportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Document19 pagesProportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Imran UnarNo ratings yet
- Toc ExperimentDocument14 pagesToc ExperimentmohitNo ratings yet
- Fixed SQRTDocument3 pagesFixed SQRTjarielmarNo ratings yet
- Solenoid ValveDocument20 pagesSolenoid ValveMayur GaidhaneNo ratings yet
- Hill Climbing TechniquesDocument10 pagesHill Climbing TechniquesfarheenNo ratings yet
- Assignment Problem With AnswersDocument4 pagesAssignment Problem With AnswerscontactdevilhereNo ratings yet
- Methods of Inventory ControlDocument2 pagesMethods of Inventory Controlengineer engrNo ratings yet
- Encrypting High Definition Video For Network Transmission Using HDCPDocument8 pagesEncrypting High Definition Video For Network Transmission Using HDCPSaurabhSharmaNo ratings yet
- Load Forecasting ClassDocument24 pagesLoad Forecasting ClassSumit Dhingra100% (1)
- MAKAUT QP Image ProcessingDocument10 pagesMAKAUT QP Image ProcessingSiddhartha SikderNo ratings yet
- Fast Discovery of Association Rules PDFDocument2 pagesFast Discovery of Association Rules PDFJenniferNo ratings yet
- BluSTL Controller Synthesis From Signal Temporal Logic SpecificationsDocument9 pagesBluSTL Controller Synthesis From Signal Temporal Logic SpecificationsRaghavendra M BhatNo ratings yet
- Queuing Theory P4Document10 pagesQueuing Theory P4Akash DubeyNo ratings yet
- Report: Expected Value 100%: Ques On 10Document4 pagesReport: Expected Value 100%: Ques On 10abel mahendraNo ratings yet
- Consider Online Shopping Site, Identify Vulnerability, Threat, and Controls. AnsDocument5 pagesConsider Online Shopping Site, Identify Vulnerability, Threat, and Controls. AnsPhenoमिनल IdiotsNo ratings yet
- Introduction of Control EngineeringDocument21 pagesIntroduction of Control EngineeringAshvani ShuklaNo ratings yet
- Lecture - CAPITAL ALLOCATION TO RISKY ASSESTSDocument40 pagesLecture - CAPITAL ALLOCATION TO RISKY ASSESTSНаиль ИсхаковNo ratings yet
- Dynamic and Autonomous Control of Mini Aerial Vehicle Using Model Predictive ControlDocument21 pagesDynamic and Autonomous Control of Mini Aerial Vehicle Using Model Predictive ControlMaidul IslamNo ratings yet
- (Cornelius Lanczos) Linear Differential OperatorsDocument582 pages(Cornelius Lanczos) Linear Differential Operatorsmichel.walz01No ratings yet
- Chapter - 3Document58 pagesChapter - 3MohammedNo ratings yet
- Automobile Insurance Fraud Detection An OverviewDocument6 pagesAutomobile Insurance Fraud Detection An OverviewCHOUDHARY SHAILENDRA VIJAYCHANDRANo ratings yet
- Pre Synthesis and Post Synthesis Power Estimation of VLSI Circuits Using Machine Learning ApproachDocument15 pagesPre Synthesis and Post Synthesis Power Estimation of VLSI Circuits Using Machine Learning Approachsohan kambleNo ratings yet
- IAT Paper Jan-June 22 DMBI DIV A&B SolutionDocument10 pagesIAT Paper Jan-June 22 DMBI DIV A&B SolutionAnirudh TripathiNo ratings yet
- JAVIER KMeans Clustering Jupyter NotebookDocument7 pagesJAVIER KMeans Clustering Jupyter NotebookAlleah LayloNo ratings yet
- Exercise 2 - SolutionDocument4 pagesExercise 2 - SolutionMUHAMMAD ZAIM ILYASA KASIMNo ratings yet
- 6th Sem - ETC - Digital Signal Processing - STUDY MATERIALDocument58 pages6th Sem - ETC - Digital Signal Processing - STUDY MATERIALSanjeev GhanghashNo ratings yet
- Lab 8. Numerical Differentiation: 1 InstructionsDocument3 pagesLab 8. Numerical Differentiation: 1 InstructionsSEBASTIAN RODRIGUEZNo ratings yet
- Refractory Condition Monitoring and Lifetime Prognosis For RH DegasserDocument10 pagesRefractory Condition Monitoring and Lifetime Prognosis For RH DegasserJJNo ratings yet
- Questions On LaplaceDocument4 pagesQuestions On LaplaceApam BenjaminNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument12 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet