You might also like
- Chapter 3 Laplace TransformDocument32 pagesChapter 3 Laplace TransformAie Neutral100% (1)
- Pertemuan 02Document20 pagesPertemuan 02I Komang Ari Satya WibawaNo ratings yet
- Chapter 3Document20 pagesChapter 3Nathalia DelgadoNo ratings yet
- Chapter 3Document20 pagesChapter 3chequillasNo ratings yet
- Pertemuan 5 - PengPros 2022-2023Document27 pagesPertemuan 5 - PengPros 2022-2023Nabillah RahmadaniNo ratings yet
- Chapter 3Document10 pagesChapter 3Ellen TannasyaNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- Assignment 4Document3 pagesAssignment 4Kriti GargNo ratings yet
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleDocument18 pagesMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(No ratings yet
- Tutorial Sheet 3Document2 pagesTutorial Sheet 3yash sononeNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- Tutorial 4 LaplaceDocument3 pagesTutorial 4 Laplacenavyaa202007No ratings yet
- Transformada de Laplace - ComplementaresDocument4 pagesTransformada de Laplace - ComplementaresMartinho Moco OelNo ratings yet
- Transfer Function ProsesDocument34 pagesTransfer Function ProsesMalasari NasutionNo ratings yet
- laplaceTransShifts NotesDocument5 pageslaplaceTransShifts NotesSakshamNo ratings yet
- ENGR 3621 Advanced Engineering Mathematics: and Its Use in Engineering/physics ProblemsDocument50 pagesENGR 3621 Advanced Engineering Mathematics: and Its Use in Engineering/physics ProblemsEngr Umer CheemaNo ratings yet
- Model Matematika IDocument41 pagesModel Matematika ISugeng HariyantoNo ratings yet
- FALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)Document16 pagesFALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)SATHIYANARAYANAN D 15BCM0007No ratings yet
- Laplace Transform: Differential EquationsDocument39 pagesLaplace Transform: Differential EquationsAlmer AndromedaNo ratings yet
- Laplace HadyDocument50 pagesLaplace HadyIhwan FauziNo ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- Solution Assignment 2Document7 pagesSolution Assignment 2sushant sharmaNo ratings yet
- Appendix A: Laplace TransformsDocument11 pagesAppendix A: Laplace TransformsAbdulRhman AL-OmariNo ratings yet
- MAT231BT - Laplace TransformsDocument25 pagesMAT231BT - Laplace TransformsRochakNo ratings yet
- Week 2Document12 pagesWeek 2Hassan El SayedNo ratings yet
- 3.use of Laplase Transform PDFDocument5 pages3.use of Laplase Transform PDFLeonard PhilipNo ratings yet
- Laplace Transform: 2.1 What Are Laplace Transforms, and Why?Document23 pagesLaplace Transform: 2.1 What Are Laplace Transforms, and Why?AHMED ALI S ALAHMADINo ratings yet
- Laplace Transformation: 1. Basic NotionsDocument5 pagesLaplace Transformation: 1. Basic NotionsCharlie BondNo ratings yet
- Chapter 2Document27 pagesChapter 2Farooq AhmadNo ratings yet
- Chapter (1) Laplace TransformDocument28 pagesChapter (1) Laplace TransformMohammed NabilNo ratings yet
- Laplace Transforms IntroductionDocument63 pagesLaplace Transforms Introductionolalere abimbolaNo ratings yet
- Lesson #2 Lecture #1 Review of Laplace TransformDocument16 pagesLesson #2 Lecture #1 Review of Laplace TransformShazidNo ratings yet
- Lecture 14 LT Adv FormulaDocument4 pagesLecture 14 LT Adv Formuladev.user.1792No ratings yet
- 33laplace Transforms and Non Standard Functions PDFDocument4 pages33laplace Transforms and Non Standard Functions PDFkinfeNo ratings yet
- ECE311S: Dynamic Systems and Control Problem Set 2Document3 pagesECE311S: Dynamic Systems and Control Problem Set 2zoeeeNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Laplace Table ProofsDocument20 pagesLaplace Table Proofskujong agacerNo ratings yet
- Laplace TransformsDocument140 pagesLaplace TransformsElormeNo ratings yet
- TRANSPORMASI LAPLACE EnglishDocument49 pagesTRANSPORMASI LAPLACE EnglishSandy Dwi KurniawanNo ratings yet
- Lecture AL3: 436-433 Mechanical Systems Part A: State-Space SystemsDocument16 pagesLecture AL3: 436-433 Mechanical Systems Part A: State-Space SystemsCarolinaLopezNo ratings yet
- Math 2280 - Final Exam: University of Utah Fall 2013Document20 pagesMath 2280 - Final Exam: University of Utah Fall 2013Abdesselem BoulkrouneNo ratings yet
- Laplace Transform - Tutorial PDFDocument2 pagesLaplace Transform - Tutorial PDFShreyansh ShethNo ratings yet
- 222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Document4 pages222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Flor Alejandra Piña RodriguezNo ratings yet
- Bab 7.1Document21 pagesBab 7.1LEE LEE LAUNo ratings yet
- Second Order Differential - Part 5Document6 pagesSecond Order Differential - Part 5nazirulaliNo ratings yet
- Laplace Transform (Updated 2018)Document29 pagesLaplace Transform (Updated 2018)Mohamad DuhokiNo ratings yet
- Chapter 3Document20 pagesChapter 3Balvinder SinghNo ratings yet
- Chapter 3Document20 pagesChapter 3Innocent ShetaanNo ratings yet
- Lecture Note Chap 3 DEDocument33 pagesLecture Note Chap 3 DEIzzat AiresNo ratings yet
- The Laplace TransformationDocument28 pagesThe Laplace TransformationNjitnumNo ratings yet
- 12 Laplace TransformDocument20 pages12 Laplace TransformLeylinar BayramovaNo ratings yet
- Mert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTDocument2 pagesMert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTOrkun AkyolNo ratings yet
- Unit IV Applications of Laplace Transform PDFDocument43 pagesUnit IV Applications of Laplace Transform PDFSanjay KumarNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument29 pagesRegulation and Control: by Tewedage SileshiSiraye AbirhamNo ratings yet
- L (Z f (τ) dτ = F(s) s: f (t) t-domain ˙ f (t) F (s) 1/s s-domainDocument7 pagesL (Z f (τ) dτ = F(s) s: f (t) t-domain ˙ f (t) F (s) 1/s s-domainDj OoNo ratings yet
- MATH 341 - Laplace - TransformDocument13 pagesMATH 341 - Laplace - TransformFaisal KabiruNo ratings yet
- Mathematical Argument DraftDocument15 pagesMathematical Argument DraftBen Matthew Alferez CoNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- AHMED, T.H - Reservoir Engineering Handbook 4ed-727-745Document19 pagesAHMED, T.H - Reservoir Engineering Handbook 4ed-727-745fennydwi alisiswoyoNo ratings yet
- Slab DesignDocument54 pagesSlab DesignKolen LalongisipNo ratings yet
- NSEP Paper Code 64Document17 pagesNSEP Paper Code 64CranxtorNo ratings yet
- 300+ (UPDATED) Thermal Engineer Interview Questions 2023Document8 pages300+ (UPDATED) Thermal Engineer Interview Questions 2023Shahameer KooushikNo ratings yet
- Modeling of an electrolyzer for а hybrid power supply systemDocument3 pagesModeling of an electrolyzer for а hybrid power supply systemashoaib3No ratings yet
- ASTM D1329 16 - Standard Test Method For Evaluating Rubber Property-Retraction at Lower Temperatures (TR Test)Document5 pagesASTM D1329 16 - Standard Test Method For Evaluating Rubber Property-Retraction at Lower Temperatures (TR Test)Andre SpirimNo ratings yet
- RR Masonary Retaining WallDocument2 pagesRR Masonary Retaining WallRajesh GangwalNo ratings yet
- Xii Maths em Unit 1,2,3,4Document75 pagesXii Maths em Unit 1,2,3,4Subbukbalaji LakshmiNo ratings yet
- Liquid Cooled Heavy Duty Inductance Unit EC-LTS1200-410: User GuideDocument44 pagesLiquid Cooled Heavy Duty Inductance Unit EC-LTS1200-410: User GuideKarina Vega AlvaradoNo ratings yet
- Counting With Permutations and Combinations CK-1Document12 pagesCounting With Permutations and Combinations CK-1Ratan KumawatNo ratings yet
- Classical Mechanics by Muhammad Usman Hamid-2Document309 pagesClassical Mechanics by Muhammad Usman Hamid-2Ali RazaNo ratings yet
- Evaluation of Different Vapor Recompression DistillationDocument9 pagesEvaluation of Different Vapor Recompression DistillationForcus onNo ratings yet
- Syllabus For General Chemistry 1: CHEM 1711 5 Credit Hours FALL 2020Document3 pagesSyllabus For General Chemistry 1: CHEM 1711 5 Credit Hours FALL 2020Mohammad AliNo ratings yet
- Coating Weight Model For The Continuous Hot-Dip Galvanizing ProcessDocument13 pagesCoating Weight Model For The Continuous Hot-Dip Galvanizing ProcessAbhishek MukherjeeNo ratings yet
- Edexcel International AS Physics: Interference & Stationary WavesDocument30 pagesEdexcel International AS Physics: Interference & Stationary WavesAhmed MahmoudNo ratings yet
- (MAA 1.10) SYSTEMS OF LINEAR EQUATIONS - EcoDocument3 pages(MAA 1.10) SYSTEMS OF LINEAR EQUATIONS - EcoDAVIES KIPRONONo ratings yet
- Physics JambDocument21 pagesPhysics JambleyeNo ratings yet
- 4004q1 Specimen PDFDocument28 pages4004q1 Specimen PDFgray100% (1)
- Unit1 Linear Algebra 1-1Document45 pagesUnit1 Linear Algebra 1-1tamanna sharmaNo ratings yet
- Dimensional Drawing: For ReviewDocument2 pagesDimensional Drawing: For ReviewmoiNo ratings yet
- 3605DV947P004Document194 pages3605DV947P004Jullyan MendesNo ratings yet
- Thermoelectric Refrigerator For Travelling: Lalit Bansal Nitesh Kumar Jha Rohan Kanodiya Sandeep JhambDocument3 pagesThermoelectric Refrigerator For Travelling: Lalit Bansal Nitesh Kumar Jha Rohan Kanodiya Sandeep JhambLalit BanaalNo ratings yet
- BEE Important Theory QuestionsDocument2 pagesBEE Important Theory QuestionsJannat ZUBAIRNo ratings yet
- Theory Analysis and Design of Metasurfaces For Smart Radio EnvironmentsDocument17 pagesTheory Analysis and Design of Metasurfaces For Smart Radio EnvironmentsKinza FaisalNo ratings yet
- Alili M S PDFDocument20 pagesAlili M S PDFStatsitika ITNo ratings yet
- ESDEP LECTURE NOTE (WG14) CraneDocument22 pagesESDEP LECTURE NOTE (WG14) Cranefloi dNo ratings yet
- CPO Focus On Physical Science Student TextbookDocument399 pagesCPO Focus On Physical Science Student TextbookAmy Doan75% (4)
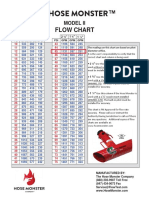
- HM2H Flow Chart GPMDocument1 pageHM2H Flow Chart GPMJishnu MedhiNo ratings yet
- CH 1 Intro To RoboticsDocument19 pagesCH 1 Intro To RoboticsMbuso MadidaNo ratings yet
- Buhler Casting FailureDocument6 pagesBuhler Casting FailureHa Gautam100% (1)