0% found this document useful (0 votes)
58 views33 pagesChapter 15
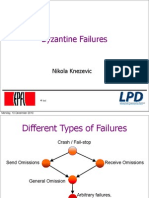
The document discusses the challenges of achieving agreement in distributed systems, proving that consensus is impossible in asynchronous systems with even one failure through an informal proof. It also covers algorithms for consensus under synchronous systems with crash failures and Byzantine faults. Key assumptions and requirements for consensus problems are defined.
Uploaded by
badman nigtCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
58 views33 pagesChapter 15
The document discusses the challenges of achieving agreement in distributed systems, proving that consensus is impossible in asynchronous systems with even one failure through an informal proof. It also covers algorithms for consensus under synchronous systems with crash failures and Byzantine faults. Key assumptions and requirements for consensus problems are defined.
Uploaded by
badman nigtCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
/ 33