You might also like
- D-EU1-Plateno.3-Pita Andrae Kate SandaeDocument5 pagesD-EU1-Plateno.3-Pita Andrae Kate SandaeShaft SandaeNo ratings yet
- Chapter 4 PDFDocument12 pagesChapter 4 PDFJamED ALRubioNo ratings yet
- Linear Programming ExamplesDocument25 pagesLinear Programming ExamplesGroup 2No ratings yet
- Flowchart exercisesDocument9 pagesFlowchart exercisesDaniel NinalNo ratings yet
- PoEC 8 Circuit Theorems and ConversionsDocument50 pagesPoEC 8 Circuit Theorems and Conversionsmohammad alajarmeh100% (1)
- Solutions To Practice Problems, Module 3: Engineering MechanicsDocument13 pagesSolutions To Practice Problems, Module 3: Engineering MechanicsShaun Patrick AlbaoNo ratings yet
- Solutions to Practice Problems: Engineering MechanicsDocument13 pagesSolutions to Practice Problems: Engineering MechanicsShaun Patrick Albao100% (1)
- Patterns and Numbers in Nature and The World: WorksheetDocument3 pagesPatterns and Numbers in Nature and The World: WorksheetBasilio ConcrenioNo ratings yet
- Example 4 1 Circuits IntroductionDocument4 pagesExample 4 1 Circuits IntroductionDiego Escobar MoncadaNo ratings yet
- Problem Set 4Document6 pagesProblem Set 4franzNo ratings yet
- Vector AlgebraDocument14 pagesVector AlgebraShang Divina EbradaNo ratings yet
- Sets and Venn Diagrams To Solve ProblemsDocument4 pagesSets and Venn Diagrams To Solve ProblemsmomathtchrNo ratings yet
- Mechanics CH-3 MarkosDocument16 pagesMechanics CH-3 MarkosGadisaNo ratings yet
- Horizontal DistanceDocument10 pagesHorizontal DistanceMary Loel Reyes SanchezNo ratings yet
- Module 4 Lesson 2Document2 pagesModule 4 Lesson 2Arah Jean MondejarNo ratings yet
- Three-Wire LevelingDocument5 pagesThree-Wire LevelingLhizel Llaneta ClaveriaNo ratings yet
- Econ Module 1Document16 pagesEcon Module 1Marbel Perez100% (1)
- Eda 1Document6 pagesEda 1Nicole Angeli LealNo ratings yet
- AVL TreeSolutionsDocument22 pagesAVL TreeSolutionsRahul Kumar100% (1)
- AC6 Module14Document12 pagesAC6 Module14Fred BorjaNo ratings yet
- Find the two-digit number if the tens' digit is 3 less than the units' digitDocument49 pagesFind the two-digit number if the tens' digit is 3 less than the units' digitAlthessa Kaela RoblesNo ratings yet
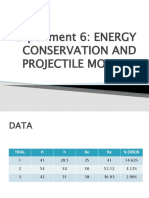
- Experiment 6: ENERGY Conservation and Projectile Motion: Group 4Document10 pagesExperiment 6: ENERGY Conservation and Projectile Motion: Group 4ParZiValNo ratings yet
- Quantiles Mendelhall and Sincich MethodDocument26 pagesQuantiles Mendelhall and Sincich Methodkereysha daradalNo ratings yet
- Chapter 2 2-002 (Basis)Document2 pagesChapter 2 2-002 (Basis)Jamiel CatapangNo ratings yet
- Midterm Exam in Advanced MathDocument3 pagesMidterm Exam in Advanced MathBenedick Jayson P. MartiNo ratings yet
- Chapter 3Document6 pagesChapter 3Frendick LegaspiNo ratings yet
- Lab 6 LU DecompositionDocument6 pagesLab 6 LU DecompositionFaraz Ali ShahNo ratings yet
- Probability of An Event: MATH142-2 Engineering Data AnalysisDocument42 pagesProbability of An Event: MATH142-2 Engineering Data Analysishazel100% (1)
- Matrices and Determinants ExplainedDocument21 pagesMatrices and Determinants ExplainedHARB Learning CentreNo ratings yet
- Module 2 - Equilibrium of Rigid BodiesDocument21 pagesModule 2 - Equilibrium of Rigid BodiesJoyce AsisNo ratings yet
- Solution 227Document15 pagesSolution 227Arjay Royales CarandangNo ratings yet
- FunSurv Module-1Document13 pagesFunSurv Module-1Lex Adrian Lucas VerdeNo ratings yet
- Albao Laboratory 1Document65 pagesAlbao Laboratory 1Shaun Patrick AlbaoNo ratings yet
- Math II Unit 1Document84 pagesMath II Unit 1florie_belleNo ratings yet
- SIM CEE 108 Week 1-3 PDFDocument28 pagesSIM CEE 108 Week 1-3 PDFIah Belleza MedelNo ratings yet
- Families of Curves: DiscussionDocument13 pagesFamilies of Curves: DiscussionJohn Glenn Lausin MaticNo ratings yet
- Angelica ADocument26 pagesAngelica AKlaisene jaysa R. BaluarteNo ratings yet
- Test On The Mean of A Normal DistributionDocument18 pagesTest On The Mean of A Normal DistributionRiss EdullantesNo ratings yet
- Acceleration Analysis of MechanismsDocument32 pagesAcceleration Analysis of MechanismsThahir Shah100% (1)
- EE 06 Correlation Problems Part III v1 9-1-16Document4 pagesEE 06 Correlation Problems Part III v1 9-1-16Joenel Ancajas0% (1)
- Prelim Exam of Route Surveying QuestionnaireDocument1 pagePrelim Exam of Route Surveying QuestionnaireAnniesonNo ratings yet
- First Order Differential Equations ApplicationsDocument41 pagesFirst Order Differential Equations ApplicationsBob BlohNo ratings yet
- Chapter Ii PDFDocument12 pagesChapter Ii PDFDiane Joy Fojas PanganibanNo ratings yet
- PDF Lesson 7 Confidence Level and Sample SizeDocument14 pagesPDF Lesson 7 Confidence Level and Sample SizeJohn Lloyd CasioNo ratings yet
- Elimination of Arbitrary ConstantsDocument4 pagesElimination of Arbitrary ConstantsShirsendu Mondol100% (1)
- Electromagnetic Fields & Waves (BEB20303) Chapter 1: Electrostatic FieldDocument32 pagesElectromagnetic Fields & Waves (BEB20303) Chapter 1: Electrostatic FieldAFiqah Nazirah JailaniNo ratings yet
- Ground Floor Plan Second-19Th Floor Plan: Scale: 1:100M Scale: 1:100MDocument1 pageGround Floor Plan Second-19Th Floor Plan: Scale: 1:100M Scale: 1:100Mkim suarezNo ratings yet
- Basic Math PresentationDocument6 pagesBasic Math PresentationGrayPrinceleyChuaNo ratings yet
- Bachelor of Science in Civil Engineering (Bsce)Document2 pagesBachelor of Science in Civil Engineering (Bsce)Regina Mambaje AlferezNo ratings yet
- College of Engineering and Food Science: Central Bicol State University of AgricultureDocument5 pagesCollege of Engineering and Food Science: Central Bicol State University of AgricultureLhizel Llaneta ClaveriaNo ratings yet
- 2 Derivative LampreaDocument11 pages2 Derivative LampreaJeriza AquinoNo ratings yet
- The Series Inductance-Capacitance (L-C) CircuitDocument7 pagesThe Series Inductance-Capacitance (L-C) Circuitzed coz100% (1)
- Activity Sheet: Rosemhier B. Magpantay Bs Psychology 2A (M)Document2 pagesActivity Sheet: Rosemhier B. Magpantay Bs Psychology 2A (M)sandara mallNo ratings yet
- Centroid of VolumeDocument10 pagesCentroid of VolumeDianne VillanuevaNo ratings yet
- Matlab Activity 4-1Document2 pagesMatlab Activity 4-1Miguel EnriquezNo ratings yet
- Planning Technical Activities GuideDocument1 pagePlanning Technical Activities GuideAcharaNo ratings yet
- Activity Numer 2 Joint VariationDocument3 pagesActivity Numer 2 Joint VariationYeoj ParasNo ratings yet
- Annuity and Gradients Part II: Calculating Present Worth Using Arithmetic and Geometric GradientsDocument19 pagesAnnuity and Gradients Part II: Calculating Present Worth Using Arithmetic and Geometric GradientsEvesonGentoleoNo ratings yet
- CHAPTER 2 - Forces and EquilibriumDocument53 pagesCHAPTER 2 - Forces and EquilibriumLin YanNo ratings yet
- Note On Vector AnalysisDocument37 pagesNote On Vector AnalysisNabil MunshiNo ratings yet
- Unit 1 Force Systems PDFDocument17 pagesUnit 1 Force Systems PDFpeter vanderNo ratings yet
- Condenser & BoilerDocument33 pagesCondenser & BoilerShaun Patrick Albao100% (1)
- Cooling Tower Principles and Calculation Design: Chemical Engineering DepartmentDocument34 pagesCooling Tower Principles and Calculation Design: Chemical Engineering DepartmentShaun Patrick AlbaoNo ratings yet
- Heat Transfer Tutorial For Heat ExchangersDocument0 pagesHeat Transfer Tutorial For Heat ExchangersvicopipNo ratings yet
- EvaporatorDocument29 pagesEvaporatorShaun Patrick AlbaoNo ratings yet
- 1heat ExchangerDocument51 pages1heat ExchangerShaun Patrick AlbaoNo ratings yet
- Albao Assignment 3Document5 pagesAlbao Assignment 3Shaun Patrick AlbaoNo ratings yet
- ChE 223: Demonstration of Couette FlowDocument39 pagesChE 223: Demonstration of Couette FlowShaun Patrick AlbaoNo ratings yet
- Albao, Shaun Patrick P. Bsche - 2A MECH 213Document4 pagesAlbao, Shaun Patrick P. Bsche - 2A MECH 213Shaun Patrick AlbaoNo ratings yet
- N at T 175 K: Given FiguresDocument2 pagesN at T 175 K: Given FiguresShaun Patrick AlbaoNo ratings yet
- Albao Laboratory 3Document35 pagesAlbao Laboratory 3Shaun Patrick AlbaoNo ratings yet
- Albao Assignment 3Document5 pagesAlbao Assignment 3Shaun Patrick AlbaoNo ratings yet
- Albao Laboratory 1Document65 pagesAlbao Laboratory 1Shaun Patrick AlbaoNo ratings yet
- ALBAO-Multiple Choice Questions 2Document2 pagesALBAO-Multiple Choice Questions 2Shaun Patrick AlbaoNo ratings yet
- Albao Assignment 1Document6 pagesAlbao Assignment 1Shaun Patrick AlbaoNo ratings yet
- ALBAO-Multiple Choice Questions 3Document3 pagesALBAO-Multiple Choice Questions 3Shaun Patrick AlbaoNo ratings yet
- Multiple choice fluid flow questionsDocument3 pagesMultiple choice fluid flow questionsShaun Patrick AlbaoNo ratings yet
- Albao Laboratory 1Document65 pagesAlbao Laboratory 1Shaun Patrick AlbaoNo ratings yet
- ALBAO-Multiple Choice Questions 2Document2 pagesALBAO-Multiple Choice Questions 2Shaun Patrick AlbaoNo ratings yet
- Albao Laboratory 3Document35 pagesAlbao Laboratory 3Shaun Patrick AlbaoNo ratings yet
- ChE 223: Demonstration of Couette FlowDocument39 pagesChE 223: Demonstration of Couette FlowShaun Patrick AlbaoNo ratings yet
- ChE 223: Demonstration of Couette FlowDocument39 pagesChE 223: Demonstration of Couette FlowShaun Patrick AlbaoNo ratings yet
- ALBAO-Multiple Choice Questions 3Document3 pagesALBAO-Multiple Choice Questions 3Shaun Patrick AlbaoNo ratings yet
- Albao Assignment 1Document6 pagesAlbao Assignment 1Shaun Patrick AlbaoNo ratings yet
- N at T 175 K: Given FiguresDocument2 pagesN at T 175 K: Given FiguresShaun Patrick AlbaoNo ratings yet
- ALBAO-Multiple Choice Questions 2Document2 pagesALBAO-Multiple Choice Questions 2Shaun Patrick AlbaoNo ratings yet
- Albao Laboratory 1Document65 pagesAlbao Laboratory 1Shaun Patrick AlbaoNo ratings yet
- Albao Assignment 3Document5 pagesAlbao Assignment 3Shaun Patrick AlbaoNo ratings yet
- Vector and Tensor Lecture NotesDocument96 pagesVector and Tensor Lecture NotesJhonnes ToledoNo ratings yet
- 38 - The Classical Electromagnetic Field Hamiltonian PDFDocument29 pages38 - The Classical Electromagnetic Field Hamiltonian PDFUltrazordNo ratings yet
- Introduction to Scilab ExplainedDocument17 pagesIntroduction to Scilab ExplainedbnatarajNo ratings yet
- Tips - The Ocean Circulation Inverse Problem PDFDocument464 pagesTips - The Ocean Circulation Inverse Problem PDFGerman Ortiz MonroyNo ratings yet
- Engelking, Sieklucki - Topology A Geometric ApproachDocument437 pagesEngelking, Sieklucki - Topology A Geometric ApproachAnonymous OZa29Avdw100% (1)
- Euler enDocument207 pagesEuler enjos3No ratings yet
- A Philosopher's Understanding of Quantum Mechanics (Vermaas)Document308 pagesA Philosopher's Understanding of Quantum Mechanics (Vermaas)BeatrizFerreira100% (1)
- Dr. XT Vuong White Paper April 2015 PDFDocument28 pagesDr. XT Vuong White Paper April 2015 PDFJuzaillan MohamedNo ratings yet
- Introduction To The Mathematical and Statistical Foundations of EconometricsDocument345 pagesIntroduction To The Mathematical and Statistical Foundations of EconometricsRiccardo TaruschioNo ratings yet
- Of The Conmuting of OperatorDocument13 pagesOf The Conmuting of OperatorGabriel LeonNo ratings yet
- Mth501 Mcqs by HiningtarDocument71 pagesMth501 Mcqs by HiningtarAgha HaiderNo ratings yet
- 180 Days NDA Mathematics Study Plan: NDA Mathematics Syllabus Consists of The Following Main TopicsDocument21 pages180 Days NDA Mathematics Study Plan: NDA Mathematics Syllabus Consists of The Following Main TopicsShaam L VNo ratings yet
- 9783319702926Document443 pages9783319702926Dan IvanovNo ratings yet
- Lecture 1: September 28, 2021: Mathematical Toolkit Autumn 2021Document5 pagesLecture 1: September 28, 2021: Mathematical Toolkit Autumn 2021Pushkaraj PanseNo ratings yet
- B E-Cs2016 PDFDocument154 pagesB E-Cs2016 PDFPoojith MassNo ratings yet
- Linear Algebra Jam 1-ColumnDocument8 pagesLinear Algebra Jam 1-ColumnLotusNo ratings yet
- Eigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraDocument3 pagesEigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraSani DanjumaNo ratings yet
- AdehabitatDocument224 pagesAdehabitatloveandexileNo ratings yet
- Visvesvaraya Technological University Belagavi: Scheme of Teaching and Examinations and SyllabusDocument47 pagesVisvesvaraya Technological University Belagavi: Scheme of Teaching and Examinations and SyllabusMohammed Sabeel KinggNo ratings yet
- Graph TheoryDocument2 pagesGraph TheoryDonald ManningNo ratings yet
- B.Tech - 1 RRU SYLLABUSDocument69 pagesB.Tech - 1 RRU SYLLABUSsaiscount01No ratings yet
- CvSU Math 70b Advanced CalculusDocument6 pagesCvSU Math 70b Advanced CalculusMichael Sta BrigidaNo ratings yet
- Reliability of Long Span Bridges Based On Design Experience With The Honshu-Shikoku Bridge PDFDocument20 pagesReliability of Long Span Bridges Based On Design Experience With The Honshu-Shikoku Bridge PDFDhimas Surya NegaraNo ratings yet
- Linear Algebra Via Complex Analysis: Alexander P. Campbell and Daniel Daners Revised Version September 13, 2012Document19 pagesLinear Algebra Via Complex Analysis: Alexander P. Campbell and Daniel Daners Revised Version September 13, 2012J Luis MlsNo ratings yet
- Sons - 2002 LSE Linear Algebra MA201Document15 pagesSons - 2002 LSE Linear Algebra MA201Gag PafNo ratings yet
- 4.3 SolutionsDocument1 page4.3 Solutionsmagical_trevorNo ratings yet
- 2001 Book FundamentalsOfConvexAnalysisDocument268 pages2001 Book FundamentalsOfConvexAnalysisparantap dansanaNo ratings yet
- Experiment 1 - Fundamental ConceptsDocument12 pagesExperiment 1 - Fundamental ConceptsShahab HamidNo ratings yet
- Computer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleyDocument29 pagesComputer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. Kelleymohamed elgammlNo ratings yet
- Linear Algebra .Ageometric Approach W.H.freemanDocument17 pagesLinear Algebra .Ageometric Approach W.H.freemanMatias GomezNo ratings yet