100% found this document useful (1 vote)
686 views54 pagesLecture9-IIR Filter
The document discusses infinite impulse response (IIR) filters and their design using different techniques. It introduces IIR filters and compares them to finite impulse response (FIR) filters. It then covers analog filter design and different methods to transform analog filters to digital IIR filters, including impulse invariance, bilinear transformation, and matched z-transformation. The key methods covered are impulse invariance, which maps analog pole locations to the digital z-plane, and bilinear transformation, which is a conformal mapping from the s-plane to the z-plane. Examples are provided on designing IIR filters using these techniques from analog prototypes.
Uploaded by
Airan TanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
100% found this document useful (1 vote)
686 views54 pagesLecture9-IIR Filter
The document discusses infinite impulse response (IIR) filters and their design using different techniques. It introduces IIR filters and compares them to finite impulse response (FIR) filters. It then covers analog filter design and different methods to transform analog filters to digital IIR filters, including impulse invariance, bilinear transformation, and matched z-transformation. The key methods covered are impulse invariance, which maps analog pole locations to the digital z-plane, and bilinear transformation, which is a conformal mapping from the s-plane to the z-plane. Examples are provided on designing IIR filters using these techniques from analog prototypes.
Uploaded by
Airan TanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
- Introduction to IIR Filters
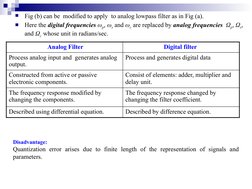
- Analog vs. Digital Filters
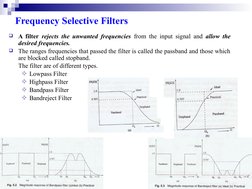
- Frequency Selective Filters
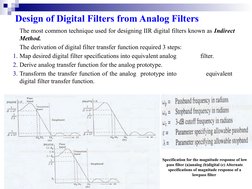
- Design of Digital Filters from Analog
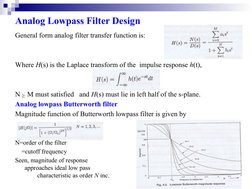
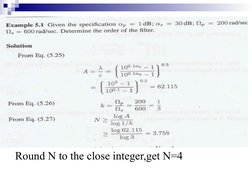
- Analog Lowpass Filter Design
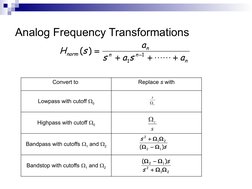
- Analog Frequency Transformations
- Design of IIR Filters
- Impulse Invariance Method
- Bilinear Transformation
- Realization of Digital Filters
- Analog Lowpass Chebyshev Filters
- Exercises
- Closing Remarks