
0% found this document useful (0 votes)
151 views25 pagesVerilog Combinational Logic Tutorial
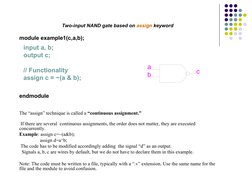
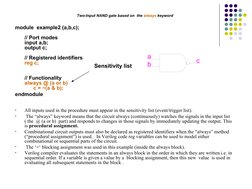
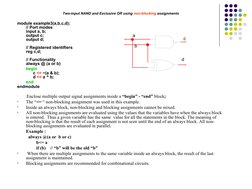
This document provides examples of Verilog code for combinational and sequential logic circuits such as NAND gates, multiplexers, and D flip-flops. It demonstrates the use of continuous assignments with "assign" and procedural assignments with "always" blocks. Blocking and non-blocking assignments as well as case statements are also illustrated. The examples serve as an introduction to basic Verilog concepts for modeling digital logic.
Uploaded by
EurusCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
151 views25 pagesVerilog Combinational Logic Tutorial
This document provides examples of Verilog code for combinational and sequential logic circuits such as NAND gates, multiplexers, and D flip-flops. It demonstrates the use of continuous assignments with "assign" and procedural assignments with "always" blocks. Blocking and non-blocking assignments as well as case statements are also illustrated. The examples serve as an introduction to basic Verilog concepts for modeling digital logic.
Uploaded by
EurusCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
![4-to-1 Multiplexor
module Mux4 (Data, Sel, Y);
//Port modes
input [3:0] Data;
input [1:0] Sel;
output Y;
reg Y;
a](https://screenshots.scribd.com/Scribd/252_100_85/189/521758667/8.jpeg)
![Four-Input MUX: an alternate method
module Mux4 (Data, Sel, Y);
//Port modes
input [3:0] Data;
input [1:0] Sel;
output Y;](https://screenshots.scribd.com/Scribd/252_100_85/189/521758667/9.jpeg)
![4-to1 MUX
module Mux16 (Data, Sel, Y);
parameter DataWidth = 16;
input [DataWidth-1:0] Data;
input [3:0] Sel;
outpu](https://screenshots.scribd.com/Scribd/252_100_85/189/521758667/10.jpeg)

























































































