You might also like
- 18CSC305J - UNIT-4.pptx - 18CSC305J - UNIT-4Document77 pages18CSC305J - UNIT-4.pptx - 18CSC305J - UNIT-4Jefferson AaronNo ratings yet
- Ai4and5 MergedDocument308 pagesAi4and5 Mergedaasrith kommojuNo ratings yet
- Ai-Unit 4Document25 pagesAi-Unit 4GayathriNo ratings yet
- 23-Module 5 - Planning by State-Space Search, Partial-Order Planning-13!03!2024Document20 pages23-Module 5 - Planning by State-Space Search, Partial-Order Planning-13!03!2024zerohero.pvgNo ratings yet
- Fall Semester 2023-24 CSE3002 ETH AP2023242000160 Reference Material I 28-Oct-2023 Planning Problem StripsDocument29 pagesFall Semester 2023-24 CSE3002 ETH AP2023242000160 Reference Material I 28-Oct-2023 Planning Problem StripsLokeshNo ratings yet
- Ch.10 Classical Planning: ActionpDocument25 pagesCh.10 Classical Planning: Actionp朝崴No ratings yet
- Goal Stack PlanningDocument31 pagesGoal Stack PlanningBrundaNo ratings yet
- Module 4 Fundamentals of SurveyingDocument39 pagesModule 4 Fundamentals of SurveyingStephanie Jean Magbanua CortezNo ratings yet
- Project Management: Discussion QuestionsDocument36 pagesProject Management: Discussion QuestionsMarlett SJ UnoNo ratings yet
- SdfdsfdsfsDocument48 pagesSdfdsfdsfsfreeintro0404No ratings yet
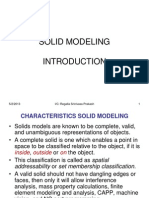
- Chapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1Document33 pagesChapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1SasiKumar PetchiappanNo ratings yet
- Be Cse 6 Cs6659 Unit IVDocument32 pagesBe Cse 6 Cs6659 Unit IVMalar AmuNo ratings yet
- Solid Modeling 123Document33 pagesSolid Modeling 123SasiKumar PetchiappanNo ratings yet
- Cosc309 - Video Clip 01 - IntroductoryDocument44 pagesCosc309 - Video Clip 01 - IntroductoryOmar AustinNo ratings yet
- Planning, Execution & Learning 1. Linear & Non - Linear PlanningDocument31 pagesPlanning, Execution & Learning 1. Linear & Non - Linear PlanningroshankojuNo ratings yet
- Frame Problem in Artificial Intelligence: Patrick J. HayesDocument29 pagesFrame Problem in Artificial Intelligence: Patrick J. HayesVinod GangalNo ratings yet
- Chap 3 HeuristicsDocument9 pagesChap 3 HeuristicssakshamNo ratings yet
- PlanningDocument26 pagesPlanningalvin augustineNo ratings yet
- Solid Modeling 12Document33 pagesSolid Modeling 12SasiKumar PetchiappanNo ratings yet
- PlanningDocument64 pagesPlanningब्राह्मण रोहित शर्माNo ratings yet
- LayoutDocument18 pagesLayoutcindyanastasia772No ratings yet
- BUS1040 Lecture Week 5 SS21Document31 pagesBUS1040 Lecture Week 5 SS21Raquel Stroher ManoNo ratings yet
- Panning in AI PPT SelfDocument17 pagesPanning in AI PPT Selfruff ianNo ratings yet
- December 2016: AMIETE - ET/CS/IT (Current Scheme)Document3 pagesDecember 2016: AMIETE - ET/CS/IT (Current Scheme)Naresh DuttNo ratings yet
- Artificial Intelligence3-1Document43 pagesArtificial Intelligence3-1Shashank ShashiNo ratings yet
- Using The Winqsb Software in Critical Path AnalysisDocument8 pagesUsing The Winqsb Software in Critical Path AnalysisDrhsn AlsadNo ratings yet
- AI-Problem Characteristics 3Document40 pagesAI-Problem Characteristics 3Mahmoud SolimanNo ratings yet
- Work-Breakdown Structure: A Simple and Powerful Tool For Project ManagementDocument57 pagesWork-Breakdown Structure: A Simple and Powerful Tool For Project ManagementAkash RsNo ratings yet
- Topic 11 Tutorial QuestionsDocument6 pagesTopic 11 Tutorial Questionsyuheng Qin100% (1)
- IS333 ExamDocument19 pagesIS333 ExamTetzNo ratings yet
- Chapter 14Document15 pagesChapter 14awatif diabNo ratings yet
- Unit-7: Planning: Dr. Gopi SanghaniDocument27 pagesUnit-7: Planning: Dr. Gopi Sanghanidemo dataNo ratings yet
- Quantitative Techniques P-1 With AnswersDocument3 pagesQuantitative Techniques P-1 With AnswersshirylNo ratings yet
- Operations Research: Time Allotted: 3 Hrs Full Marks: 70Document5 pagesOperations Research: Time Allotted: 3 Hrs Full Marks: 70Swapnil DeyNo ratings yet
- Ch05 Facilities LayoutDocument45 pagesCh05 Facilities LayoutPhương UyênNo ratings yet
- GR 10 - Research Project - Road Accidents 2023-1Document5 pagesGR 10 - Research Project - Road Accidents 2023-1katlegodikgetsi60No ratings yet
- Lec-4-HEURISTIC SEARCH METHODS-1Document54 pagesLec-4-HEURISTIC SEARCH METHODS-1manitNo ratings yet
- Project Management Chapter 9Document32 pagesProject Management Chapter 9Mattia BianchiNo ratings yet
- Hierarchical PlanningDocument20 pagesHierarchical Planningyr avinashNo ratings yet
- ACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXDocument8 pagesACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXKshitiz BhardwajNo ratings yet
- Workbook 20230615044422385291 Identify Area Through Decomposition Practice NDocument6 pagesWorkbook 20230615044422385291 Identify Area Through Decomposition Practice NCyril Danica LimareNo ratings yet
- Week4 (Blocks World and Rejecting Symbolic AI)Document27 pagesWeek4 (Blocks World and Rejecting Symbolic AI)Nourhan AbdiNo ratings yet
- Walton - PMAN635 Final Exam v1Document6 pagesWalton - PMAN635 Final Exam v1BINIT AGRAWALNo ratings yet
- Final Exam: Eng. Ismail Al DaoorDocument8 pagesFinal Exam: Eng. Ismail Al DaoorhammoNo ratings yet
- Week # 10 Lecture # 19 & 20 General Problem Solver: Learning ObjectivesDocument10 pagesWeek # 10 Lecture # 19 & 20 General Problem Solver: Learning Objectivessultan ayubiNo ratings yet
- 4 - Location Models in Facility Planning-Part 1Document68 pages4 - Location Models in Facility Planning-Part 1g00088291No ratings yet
- CADD-1055 AutoCAD Lecture 1Document63 pagesCADD-1055 AutoCAD Lecture 1Kirandeep GandhamNo ratings yet
- Planning: CMSC421 - FALL 2006Document38 pagesPlanning: CMSC421 - FALL 2006CarlileCullenNo ratings yet
- 14 Solid Modeling Rev3Document75 pages14 Solid Modeling Rev3arya100% (1)
- Operational ResearchDocument23 pagesOperational ResearchNafees A. SiddiqueNo ratings yet
- Date Subject: Guide 04 Criterion A and B Unit Title: Topic: Operation With Funtion Term: Ii Name: Class: Score: Objetive: Prepared By: Checked byDocument3 pagesDate Subject: Guide 04 Criterion A and B Unit Title: Topic: Operation With Funtion Term: Ii Name: Class: Score: Objetive: Prepared By: Checked byJuan Fernando GarcíaNo ratings yet
- Assignment 2Document17 pagesAssignment 2Muhammad Nur HelmyNo ratings yet
- Approaches To Line Balancing Comsoal & RPW: Active LearningDocument30 pagesApproaches To Line Balancing Comsoal & RPW: Active LearningMd Majharul IslamNo ratings yet
- Lecture 4Document10 pagesLecture 4husseinoday10No ratings yet
- C10 - Dynamic ProgrammingDocument43 pagesC10 - Dynamic ProgrammingVan Anh NguyenNo ratings yet
- Hill Climbing AlgorithmDocument49 pagesHill Climbing AlgorithmSafdar JafriNo ratings yet
- Orion Spacecraft 11th MathsDocument13 pagesOrion Spacecraft 11th Mathssarvesh kuraneNo ratings yet
- Or Mba FM Bi Be Unit 4Document38 pagesOr Mba FM Bi Be Unit 4Vani GangilNo ratings yet
- Unit 5Document21 pagesUnit 5Ganesh RathnamNo ratings yet
- Black and White Box TestingDocument43 pagesBlack and White Box TestingGanesh RathnamNo ratings yet
- Testing Object-Oriented ApplicationsDocument38 pagesTesting Object-Oriented ApplicationsGanesh RathnamNo ratings yet
- Ncert Solution of Praticle Book Python Class 11 Sumita AroaraDocument70 pagesNcert Solution of Praticle Book Python Class 11 Sumita AroaraGanesh RathnamNo ratings yet
- Theory of PN Junction Diode: DiffusionDocument40 pagesTheory of PN Junction Diode: DiffusionGanesh RathnamNo ratings yet
- Undergraduate-Handbook-STEI-2015 v1 PDFDocument146 pagesUndergraduate-Handbook-STEI-2015 v1 PDFYen PrayogiNo ratings yet
- SAP Financial Closing Cockpit: November 2015Document17 pagesSAP Financial Closing Cockpit: November 2015rahul_agrawal165No ratings yet
- Hand Written ProjectDocument40 pagesHand Written ProjecthayatNo ratings yet
- Epson L3252 Brochure PDFDocument2 pagesEpson L3252 Brochure PDFCosmic4k StudiosNo ratings yet
- Module Client SideDocument3 pagesModule Client SideBot 006No ratings yet
- Date Sheet-Terminal Exams - Fall 20-1Document6 pagesDate Sheet-Terminal Exams - Fall 20-1Muhammad Zaeem AkmalNo ratings yet
- IC Scrum Product Roadmap 11120 PowerpointDocument4 pagesIC Scrum Product Roadmap 11120 Powerpointmailtonoorul4114No ratings yet
- GV50 Quick Start PDFDocument2 pagesGV50 Quick Start PDFJoão Paulo Machado ClaroNo ratings yet
- Algorithm: Is A Finite Set of Precise Instructions For Performing A Computation or For Solving A ProblemDocument7 pagesAlgorithm: Is A Finite Set of Precise Instructions For Performing A Computation or For Solving A ProblemevamagtibayNo ratings yet
- Computer Org Unit 3Document25 pagesComputer Org Unit 3Harshita GopuNo ratings yet
- Modules With Available Quota - 2019!11!12 - 9amDocument7 pagesModules With Available Quota - 2019!11!12 - 9amdhmanoharNo ratings yet
- Network Models: Lecturer: Dr. Ebrahim A. RahmanDocument95 pagesNetwork Models: Lecturer: Dr. Ebrahim A. Rahmanmazyoon anaNo ratings yet
- VRAMr FO4 User Guide v1Document17 pagesVRAMr FO4 User Guide v1chrisggoodyNo ratings yet
- SAP AdaptersDocument189 pagesSAP Adapterssaikumar bhoppleNo ratings yet
- Blockchain Question BankDocument11 pagesBlockchain Question BankelemantsNo ratings yet
- Advanced Certification in Cyber Security 1Document13 pagesAdvanced Certification in Cyber Security 1raj503No ratings yet
- Software Engineer TellenceDocument3 pagesSoftware Engineer TellenceTestMail TestMailNo ratings yet
- Direct3D 12 Glossary (Windows)Document3 pagesDirect3D 12 Glossary (Windows)AminbinhasibNo ratings yet
- PHP RunnerDocument1,392 pagesPHP RunnerJovan NikodinovskiNo ratings yet
- NetScaler Release 10.5 TDMDocument41 pagesNetScaler Release 10.5 TDMRene van RoonNo ratings yet
- ECO: Edge-Cloud Optimization of 5G Applications: Kunal Rao, Giuseppe Coviello, Wang-Pin Hsiung, Srimat ChakradharDocument19 pagesECO: Edge-Cloud Optimization of 5G Applications: Kunal Rao, Giuseppe Coviello, Wang-Pin Hsiung, Srimat ChakradharjsprchinaNo ratings yet
- Survey Kepemilikan Laptop - Notebook (168 Mahasiswa)Document10 pagesSurvey Kepemilikan Laptop - Notebook (168 Mahasiswa)Anastasya SaragihNo ratings yet
- Aquarius Aquarius: GPS Positioning System GPS Positioning SystemDocument1 pageAquarius Aquarius: GPS Positioning System GPS Positioning SystemElettoreNo ratings yet
- 94-0137-4-B Mini-RadaScan Installers GuideDocument70 pages94-0137-4-B Mini-RadaScan Installers GuideAshly JosephNo ratings yet
- LogDocument664 pagesLogIan Jame MonterdeNo ratings yet
- Software PrototypingDocument13 pagesSoftware PrototypingQuốc Thịnh UngNo ratings yet
- Usful LinksDocument4 pagesUsful LinksNainika KedarisettiNo ratings yet
- Using FSG DDE Client With Excel DDE Server in Windows 7 and Windows 2008Document9 pagesUsing FSG DDE Client With Excel DDE Server in Windows 7 and Windows 2008venuNo ratings yet
- Virtual Private Network (VPN) LabDocument16 pagesVirtual Private Network (VPN) LabAwabdeh 97No ratings yet
- CSC 304 - M1 - StudentsDocument20 pagesCSC 304 - M1 - StudentsNeivil Jean N. EgoniaNo ratings yet