You might also like
- Developing Secure Scala Applications With Fortify For ScalaDocument28 pagesDeveloping Secure Scala Applications With Fortify For ScalaIvan KurajNo ratings yet
- Week 1 Network FundamentalsDocument232 pagesWeek 1 Network FundamentalsManmeetSinghDuaNo ratings yet
- 2 LeanDocument63 pages2 Leanhaidar khadourNo ratings yet
- Module - 2Document130 pagesModule - 2Ronit ReddyNo ratings yet
- 18CSC205J Operating Systems Unit 5 - NewDocument140 pages18CSC205J Operating Systems Unit 5 - NewDaksh ChauhanNo ratings yet
- From Traditional To GitOps A Tale of ModernizationDocument23 pagesFrom Traditional To GitOps A Tale of ModernizationVíctor OrozcoNo ratings yet
- Module 1Document111 pagesModule 1Ronit ReddyNo ratings yet
- CSharp TutorialDocument181 pagesCSharp TutorialKartheek VvsNo ratings yet
- Information TechnologyDocument110 pagesInformation TechnologyDaniel Jr. BalbinNo ratings yet
- CKA: Kubernetes Monitoring ArchitectureDocument29 pagesCKA: Kubernetes Monitoring ArchitectureashooNo ratings yet
- Combine PDFDocument113 pagesCombine PDFsanjayNo ratings yet
- Build and Run Applications in A Dockerless Kubernetes WorldDocument49 pagesBuild and Run Applications in A Dockerless Kubernetes WorldDodo winyNo ratings yet
- Git PresentationDocument125 pagesGit Presentationmails4vipsNo ratings yet
- Github Github GithubDocument112 pagesGithub Github Githubdjfaweifj weijfNo ratings yet
- AKS BookletDocument12 pagesAKS BookletRonald ValdésNo ratings yet
- Cloud On Board - Core Infra v5Document241 pagesCloud On Board - Core Infra v5NaseemNo ratings yet
- Devops&Cloud CVDocument7 pagesDevops&Cloud CVJagadeesh NandylaNo ratings yet
- Helm and GitOps at CERNDocument18 pagesHelm and GitOps at CERNstalemate97No ratings yet
- AnsibleDocument8 pagesAnsiblePrasoon MajumdarNo ratings yet
- Toolchains 2021Document79 pagesToolchains 2021meong423No ratings yet
- Tower Intro1 PDFDocument34 pagesTower Intro1 PDFalex275No ratings yet
- 18CSC205J-Operating Systems: Unit-IIDocument140 pages18CSC205J-Operating Systems: Unit-IIAnkit KumarNo ratings yet
- 18CSC205J Operating Systems-Unit-5Document138 pages18CSC205J Operating Systems-Unit-5Darsh RawatNo ratings yet
- Ansible Training CourseDocument12 pagesAnsible Training Courserasha hajlaouiNo ratings yet
- Docker IntroductionDocument59 pagesDocker IntroductionChandra Shekhar100% (1)
- Image Guide of OpenstackDocument101 pagesImage Guide of OpenstackAbdou MfopaNo ratings yet
- Forwarding and Routing PDFDocument84 pagesForwarding and Routing PDFabhishek reddyNo ratings yet
- Docker PPT 2Document48 pagesDocker PPT 2karthikm07No ratings yet
- SQAT - Question BankDocument21 pagesSQAT - Question BankmalathiNo ratings yet
- Carlosgarcia Slides 180312234839Document96 pagesCarlosgarcia Slides 180312234839parreseNo ratings yet
- JavascriptDocument158 pagesJavascriptSonam GuptaNo ratings yet
- Mod 1Document117 pagesMod 1StevenNo ratings yet
- SOASTA CloudTest WebUI Testing Tutorial PDFDocument39 pagesSOASTA CloudTest WebUI Testing Tutorial PDFVeena ChoubeNo ratings yet
- ITIL Introduction: Linpei ZhangDocument67 pagesITIL Introduction: Linpei ZhangstephanieuhNo ratings yet
- 1 Docker Deep Dive m1 Slides PDFDocument8 pages1 Docker Deep Dive m1 Slides PDFmostafahassanNo ratings yet
- Lucene SolrDocument52 pagesLucene SolrRubila Dwi AdawiyahNo ratings yet
- 06 - Spring Into Kubernetes - Paul CzarkowskiDocument66 pages06 - Spring Into Kubernetes - Paul CzarkowskiKyawzaw AungNo ratings yet
- M4 - Introduction To Kubernetes Workloads v1.7Document107 pagesM4 - Introduction To Kubernetes Workloads v1.7Nguh DanielNo ratings yet
- VM Ware PerfDocument279 pagesVM Ware PerfeeeprasannaNo ratings yet
- Docker StartDocument19 pagesDocker StartSaty RaghavacharyNo ratings yet
- Build Scalable Apps with Docker and KubernetesDocument133 pagesBuild Scalable Apps with Docker and KubernetesazureNo ratings yet
- Corejava SlidesDocument137 pagesCorejava SlidesDeepthi MuthuNo ratings yet
- Container Mechanics in RKT and LinuxDocument75 pagesContainer Mechanics in RKT and LinuxAnonymous ryDGv1No ratings yet
- Foundations of IBM DevOps V2 Exam C1000-040 Study GuideDocument31 pagesFoundations of IBM DevOps V2 Exam C1000-040 Study GuideVarun JaunkyNo ratings yet
- Openshift PresentationDocument27 pagesOpenshift PresentationRodrigo CamposNo ratings yet
- Continuous Deployment for Docker Apps to Kubernetes GuideDocument17 pagesContinuous Deployment for Docker Apps to Kubernetes GuideMiguel CasasNo ratings yet
- Edit Kubernetes ObjectsDocument500 pagesEdit Kubernetes ObjectsHarsha DEVOPSNo ratings yet
- UNIX and Shell Scripting - Module 2Document44 pagesUNIX and Shell Scripting - Module 2sr_saurab8511No ratings yet
- Linux Academy PDFDocument21 pagesLinux Academy PDFMireki VallaNo ratings yet
- Containerisation WithDocument74 pagesContainerisation WithviswatejaNo ratings yet
- System Admin Unit1 & Unit2Document112 pagesSystem Admin Unit1 & Unit2Shivansh JoshiNo ratings yet
- Cloud Computing (Draft For Review)Document103 pagesCloud Computing (Draft For Review)s0pnadisht0No ratings yet
- Introduction To Wireshark: COMP2322 Lab 1Document24 pagesIntroduction To Wireshark: COMP2322 Lab 1iwc2008007No ratings yet
- Introduction of DevOpsDocument14 pagesIntroduction of DevOpshadi.utomoNo ratings yet
- CIS Google Cloud Platform Foundation Benchmark v1.3.0Document327 pagesCIS Google Cloud Platform Foundation Benchmark v1.3.0Esa FirmansyahNo ratings yet
- Integrate Docker With CI/CD PipelinesDocument17 pagesIntegrate Docker With CI/CD PipelinesStevenNo ratings yet
- UntitledDocument43 pagesUntitledsaiteja irrinkiNo ratings yet
- Drupal and Container Orchestration - Using Kubernetes To Manage All The ThingsDocument21 pagesDrupal and Container Orchestration - Using Kubernetes To Manage All The ThingsIdris Nearby каляNo ratings yet
- Adobe Scan 12 Mar 2022Document6 pagesAdobe Scan 12 Mar 2022DAVU REVANTH NAGNo ratings yet
- Ass 1Document10 pagesAss 1DAVU REVANTH NAGNo ratings yet
- Co-2 - CoaDocument46 pagesCo-2 - CoaDAVU REVANTH NAGNo ratings yet
- Jfet, D-Mosfet, E-Mosfet, Vmos, CmosDocument47 pagesJfet, D-Mosfet, E-Mosfet, Vmos, CmosDAVU REVANTH NAGNo ratings yet
- Haukongo Nursing 2020Document86 pagesHaukongo Nursing 2020Vicky Torina ShilohNo ratings yet
- Federal Ombudsmen Institutional Reforms Act, 2013Document8 pagesFederal Ombudsmen Institutional Reforms Act, 2013Adv HmasNo ratings yet
- EN - Ultrasonic Sensor Spec SheetDocument1 pageEN - Ultrasonic Sensor Spec Sheettito_matrixNo ratings yet
- Soc 1 Report Salesforce Services - 5EwWEDocument75 pagesSoc 1 Report Salesforce Services - 5EwWEArif IqbalNo ratings yet
- Comments PRAG FinalDocument13 pagesComments PRAG FinalcristiancaluianNo ratings yet
- Chapter 4 Earth WorkDocument39 pagesChapter 4 Earth WorkYitbarek BayieseNo ratings yet
- Automatic Transaxle and Transfer Workshop Manual Aw6A-El Aw6Ax-ElDocument212 pagesAutomatic Transaxle and Transfer Workshop Manual Aw6A-El Aw6Ax-ElVIDAL ALEJANDRO GARCIAVARGASNo ratings yet
- Communicate With S7-1200 Via EhernetDocument6 pagesCommunicate With S7-1200 Via EhernetRegisNo ratings yet
- BTP Presentation - Sem 8Document24 pagesBTP Presentation - Sem 8Nihal MohammedNo ratings yet
- BLRBAC Emergency Shutdown Procedure (February 2012)Document18 pagesBLRBAC Emergency Shutdown Procedure (February 2012)SubburajMechNo ratings yet
- Market Profiling, Targeting and PositioningDocument16 pagesMarket Profiling, Targeting and PositioningMichelle RotairoNo ratings yet
- Nevada Reports 1882-1883 (17 Nev.) PDFDocument334 pagesNevada Reports 1882-1883 (17 Nev.) PDFthadzigsNo ratings yet
- The Role of Business in Social and Economic Development Chapter 1Document18 pagesThe Role of Business in Social and Economic Development Chapter 1Emil EscasinasNo ratings yet
- An SAP Consultant - ABAP - ALV Blocked List1Document3 pagesAn SAP Consultant - ABAP - ALV Blocked List1Shikhar AgarwalNo ratings yet
- Segilola Gold ProjectDocument11 pagesSegilola Gold ProjectaishaNo ratings yet
- Llave de Impacto PDFDocument21 pagesLlave de Impacto PDFmasterfiera1No ratings yet
- SMAI Assignment 7 Report - 20161204 PDFDocument6 pagesSMAI Assignment 7 Report - 20161204 PDFAliNo ratings yet
- Diesel Injector FailureDocument19 pagesDiesel Injector FailureWayne Mcmeekan100% (2)
- Natural Fibres For Composites in EthiopiaDocument12 pagesNatural Fibres For Composites in EthiopiaTolera AderieNo ratings yet
- SQL Server Management Studio Database Engine Query Editor Window - Microsoft DocsDocument6 pagesSQL Server Management Studio Database Engine Query Editor Window - Microsoft DocsAchamyeleh TamiruNo ratings yet
- Odoo JS Framework Rewrite Brings New Views and TestingDocument68 pagesOdoo JS Framework Rewrite Brings New Views and TestingglobalknowledgeNo ratings yet
- Design For Six Sigma Za PrevodDocument21 pagesDesign For Six Sigma Za PrevodSrdjan TomicNo ratings yet
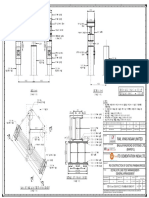
- Routine Pile Load Test-Ga-13.04.2021Document1 pageRoutine Pile Load Test-Ga-13.04.2021Digambar JadhavNo ratings yet
- PMDC Renewal FormDocument3 pagesPMDC Renewal FormAmjad Ali100% (1)
- Analyzing Air Asia in Business Competition Era: AirasiaDocument14 pagesAnalyzing Air Asia in Business Competition Era: Airasiashwaytank10No ratings yet
- Feasibility ReportDocument10 pagesFeasibility ReportAdityaNo ratings yet
- Document - University Admission SystemDocument100 pagesDocument - University Admission SystemNaresh SharmaNo ratings yet
- Athlete WaiverDocument1 pageAthlete WaiverRonan MurphyNo ratings yet
- Combined SGMA 591Document46 pagesCombined SGMA 591Steve BallerNo ratings yet
- Operating Instructions MA 42 - Maico Diagnostics PDFDocument28 pagesOperating Instructions MA 42 - Maico Diagnostics PDFJuan PáezNo ratings yet