You might also like
- CH 6-GraphsDocument46 pagesCH 6-Graphssolaiamn hassanNo ratings yet
- OSI WorksheetDocument4 pagesOSI WorksheetArife Muse BorchaNo ratings yet
- Yamaha Tx816 Tx216 Service ManualDocument32 pagesYamaha Tx816 Tx216 Service ManualZoranNo ratings yet
- SSD Work BookDocument176 pagesSSD Work BooktinashemambarizaNo ratings yet
- Motor S-50 Ddec-IvDocument1 pageMotor S-50 Ddec-IvRoger Lechado Garcia100% (3)
- Reference Material I 23-Jul-2020 GraphBasicsDocument45 pagesReference Material I 23-Jul-2020 GraphBasicsVaibhav GargNo ratings yet
- CENG 205 Data Structures: GraphsDocument72 pagesCENG 205 Data Structures: GraphsFeza GulyabaniNo ratings yet
- GraphDocument82 pagesGraphHamza GamingNo ratings yet
- Elementary Graph Algorithms: PART-1 Graph Theory TerminologyDocument31 pagesElementary Graph Algorithms: PART-1 Graph Theory TerminologyOthman SwedanNo ratings yet
- Chapter 1Document25 pagesChapter 1FARAH AZURIN MOHD FABLINo ratings yet
- Data Structures and Algorithms: GraphsDocument47 pagesData Structures and Algorithms: GraphsMuhammed khaledNo ratings yet
- GraphsDocument156 pagesGraphsVishal GaurNo ratings yet
- Discrete Math - Graph - TreeDocument47 pagesDiscrete Math - Graph - TreeSamratNo ratings yet
- It 123 Chapter 2Document31 pagesIt 123 Chapter 2ICT-BILL GATE-Billy Rovic QuilangNo ratings yet
- AST20105 Data Structure and Algorithms: Chapter 8 - GraphDocument42 pagesAST20105 Data Structure and Algorithms: Chapter 8 - GraphHANG XUNo ratings yet
- Let Us Switch To A New Topic:: Graphs Graph TheoryDocument27 pagesLet Us Switch To A New Topic:: Graphs Graph TheoryAfiat Khan TahsinNo ratings yet
- Graph Theorychap4Document112 pagesGraph Theorychap4snehasispal.spNo ratings yet
- GraphsDocument21 pagesGraphsJ SIRISHA DEVINo ratings yet
- Graph TheoryDocument50 pagesGraph Theorykobby klausNo ratings yet
- Discrete Mathematics: Graph Theory 1Document18 pagesDiscrete Mathematics: Graph Theory 1Isif SethiNo ratings yet
- 07 CS316 - Algorithms - Graph 1 - SearchDocument59 pages07 CS316 - Algorithms - Graph 1 - SearchEssamNo ratings yet
- Data Structures and Algorithms Bushra Bashir ChaoudhryDocument36 pagesData Structures and Algorithms Bushra Bashir ChaoudhryMariam WasifNo ratings yet
- Basics of Graph TheoryDocument31 pagesBasics of Graph Theorypurijatin100% (3)
- Introduction To Graphs: Multigraph, Other Just Call A GraphDocument17 pagesIntroduction To Graphs: Multigraph, Other Just Call A GraphMaitreyee Abhisek SaikiaNo ratings yet
- Alg 07Document17 pagesAlg 07Mahamad AliNo ratings yet
- Table of ContentDocument20 pagesTable of Contentcharlita iliganNo ratings yet
- CH10 1Document56 pagesCH10 1Sujin PrajapatiNo ratings yet
- Chapter 4 (Graph Theory Edited)Document18 pagesChapter 4 (Graph Theory Edited)Babal YepaNo ratings yet
- MT131 Tutorial - 7 GraphsDocument55 pagesMT131 Tutorial - 7 Graphsamr alzaktaNo ratings yet
- C5 Network (Part 1)Document10 pagesC5 Network (Part 1)USHA DEVI A/P LINGAPPAN MoeNo ratings yet
- Chapter 3-Graph Algorithms: 2021 Prepared By: Beimnet GDocument42 pagesChapter 3-Graph Algorithms: 2021 Prepared By: Beimnet GBetty KebedeNo ratings yet
- Chapter 3-Graph Algorithms: 2021 Prepared By: Beimnet GDocument42 pagesChapter 3-Graph Algorithms: 2021 Prepared By: Beimnet GBetty KebedeNo ratings yet
- Examsexpert - In: Graphs, Hashing, Sorting, FilesDocument24 pagesExamsexpert - In: Graphs, Hashing, Sorting, FilesaaaaNo ratings yet
- Data Structure Unit 4Document14 pagesData Structure Unit 4Jack SinsNo ratings yet
- Lect02 Graph BasicsDocument7 pagesLect02 Graph BasicsAnthony-Dimitri ANo ratings yet
- Kinds of Graphs. Data Structures For Graph Representation. Connectivity: The Na Ive Algorithm and Warshall AlgorithmDocument27 pagesKinds of Graphs. Data Structures For Graph Representation. Connectivity: The Na Ive Algorithm and Warshall AlgorithmRaluca RomanovNo ratings yet
- Lecture 8 MTL180Document53 pagesLecture 8 MTL180Mayank JhaNo ratings yet
- 40 GraphsDocument25 pages40 GraphsshwetajunejaNo ratings yet
- Dastal DEMODocument30 pagesDastal DEMOteztdummyNo ratings yet
- Graph:: Unit-V GraphsDocument26 pagesGraph:: Unit-V GraphsRekha SreeNo ratings yet
- Advanced Analysis of Algorithm: Course Instructor: Mirza Adnan Baig Week # 9Document30 pagesAdvanced Analysis of Algorithm: Course Instructor: Mirza Adnan Baig Week # 9Sanaullah NazikNo ratings yet
- Module89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsDocument25 pagesModule89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsSsteven John LavariasNo ratings yet
- Design & Analysis of Algorithms: Lecture#10 Graph Introduction, BFT, DFT, MST, Shortest PathDocument115 pagesDesign & Analysis of Algorithms: Lecture#10 Graph Introduction, BFT, DFT, MST, Shortest PathZAIN MUSHTAQNo ratings yet
- 9.0 Graphs Full SetDocument63 pages9.0 Graphs Full SetFaiz RamliNo ratings yet
- Graph Theory NotesDocument53 pagesGraph Theory Notesmazhar10325100% (1)
- Introduction To Graph Theory: Department of Mathematics College of Science Al Mustansiryiah University 2023-2024Document31 pagesIntroduction To Graph Theory: Department of Mathematics College of Science Al Mustansiryiah University 2023-2024moamelreedNo ratings yet
- Discrete Mathematics - GraphsDocument5 pagesDiscrete Mathematics - GraphsRokonuzzamanNo ratings yet
- Graphs: Algorithmic Thinking Luay NakhlehDocument21 pagesGraphs: Algorithmic Thinking Luay NakhlehmakkundaNo ratings yet
- Unit-3 NotesDocument17 pagesUnit-3 Notesj79494793No ratings yet
- 08 Graph Algorithms Part1Document76 pages08 Graph Algorithms Part1Ahmad AlarabyNo ratings yet
- Chapter 8 GRAPH THEORY-2Document9 pagesChapter 8 GRAPH THEORY-2αllєfταωєNo ratings yet
- Graph SearchDocument45 pagesGraph SearchTejus V SNo ratings yet
- 1 Ds 19Document49 pages1 Ds 19Mustafa HassanNo ratings yet
- The Graph ADT Introduction Graph Representation Elementary Graph Operations BFS, DFSDocument14 pagesThe Graph ADT Introduction Graph Representation Elementary Graph Operations BFS, DFSRekha SreeNo ratings yet
- CSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissDocument34 pagesCSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissSreekesh RavindranNo ratings yet
- Segment 7Document81 pagesSegment 7Tuhin AbdullahNo ratings yet
- Lecture 13Document28 pagesLecture 1319-40122-1No ratings yet
- Graph NTreeDocument38 pagesGraph NTreekashishNo ratings yet
- Lecture 05Document56 pagesLecture 05Shaista RiazNo ratings yet
- Graph 032001Document16 pagesGraph 032001Hulk ManNo ratings yet
- CPE133-Lecture Notes - L7-451-Graphs and SearchDocument36 pagesCPE133-Lecture Notes - L7-451-Graphs and SearchAhmed SaidNo ratings yet
- Graphs, Hashing, Sorting, Files: Definitions: Graph, Vertices, EdgesDocument24 pagesGraphs, Hashing, Sorting, Files: Definitions: Graph, Vertices, EdgesMohan BiradarNo ratings yet
- GraphsDocument20 pagesGraphsSarthak GuptaNo ratings yet
- Sorting AlgorithmDocument106 pagesSorting AlgorithmArife Muse BorchaNo ratings yet
- Cha2 AlgorithmDocument48 pagesCha2 AlgorithmArife Muse BorchaNo ratings yet
- OSI WorksheetDocument4 pagesOSI WorksheetArife Muse BorchaNo ratings yet
- Return To Castle Wolfenstein Cheats: The Web Ign. ComDocument16 pagesReturn To Castle Wolfenstein Cheats: The Web Ign. ComSiddharth Dey0% (1)
- Colorado Math StandardsDocument18 pagesColorado Math StandardsromulusxNo ratings yet
- Rei Das OptionsDocument2 pagesRei Das OptionsFagner VieiraNo ratings yet
- 10.2 Video Games PDFDocument13 pages10.2 Video Games PDFDexter CaroNo ratings yet
- Multimeter ReportDocument15 pagesMultimeter Reportapi-244226518No ratings yet
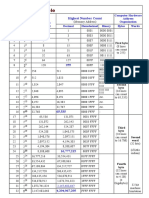
- Powers of 2 Table - Vaughn's SummariesDocument2 pagesPowers of 2 Table - Vaughn's SummariesAnonymous NEqv0Uy7KNo ratings yet
- JBL Charge5 SpecSheet EnglishDocument2 pagesJBL Charge5 SpecSheet EnglishAung Thu LinnNo ratings yet
- QR Code in School Education-Oer Digital Content C.PALANISAMY, M.SC (Bot) ., M.Ed., M.Phil., M.A (Yoga) ., M.SC (Psy) .,PGDCA.Document5 pagesQR Code in School Education-Oer Digital Content C.PALANISAMY, M.SC (Bot) ., M.Ed., M.Phil., M.A (Yoga) ., M.SC (Psy) .,PGDCA.ramNo ratings yet
- Ermias-Ademe-industrial Practice ReportDocument21 pagesErmias-Ademe-industrial Practice Reportkidusbelete019No ratings yet
- 52 GSM BSS Network PS KPI (Downlink TBF Establishment Success Rate) Optimization ManualDocument31 pages52 GSM BSS Network PS KPI (Downlink TBF Establishment Success Rate) Optimization ManualMistero_H100% (4)
- PCS7 PowerControl enDocument58 pagesPCS7 PowerControl enTagno Miguel Macedo0% (1)
- Product List at EtonDocument4 pagesProduct List at EtonDean Jones QueltadenNo ratings yet
- 090 - Nepal GEA - SOA ESB Design Guidelines v2.0Document52 pages090 - Nepal GEA - SOA ESB Design Guidelines v2.0rafahellcNo ratings yet
- Daily Time Record Riza G. Bentulan Daily Time Record Riza G. BentulanDocument1 pageDaily Time Record Riza G. Bentulan Daily Time Record Riza G. BentulanPj ManejaNo ratings yet
- Component Replacement - 009Document13 pagesComponent Replacement - 009Edison Andres Ocampo GomezNo ratings yet
- Ict - chs9 Lesson 1 - Basic Computer Configuration SetupDocument29 pagesIct - chs9 Lesson 1 - Basic Computer Configuration SetupOmengMagcalasNo ratings yet
- Strings and String OperationsDocument10 pagesStrings and String OperationsMridula BvsNo ratings yet
- Instalación y Configuración de MailWatcahDocument6 pagesInstalación y Configuración de MailWatcahLuis Miguel HDNo ratings yet
- Materi Konsep Dasar TVDocument7 pagesMateri Konsep Dasar TVOemah CodeNo ratings yet
- 4Document42 pages4Lini IckappanNo ratings yet
- ASME UT Procedure WritingDocument7 pagesASME UT Procedure WritingReiaz Hosein100% (3)
- LabVIEW Design PatternsDocument56 pagesLabVIEW Design PatternsmixarimNo ratings yet
- Coral EpabxDocument25 pagesCoral EpabxMushtaq AhmadNo ratings yet
- Laser Third Edition b2 WB Unit 3 TechnologyDocument8 pagesLaser Third Edition b2 WB Unit 3 TechnologyBob MurleyNo ratings yet
- Mpplus™ V C: Olume OrrectorDocument2 pagesMpplus™ V C: Olume OrrectorPaul Ramos CarcaustoNo ratings yet
- S18 Series Sensors (AC Voltage) DatasheetDocument1 pageS18 Series Sensors (AC Voltage) DatasheetPaulomario RemuzgoNo ratings yet
- BlackEnergy DDoS Bot AnalysisDocument11 pagesBlackEnergy DDoS Bot AnalysisSourabh BhagatNo ratings yet